本文主要是介绍[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-3+4,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文仅供学习使用
本文参考:
B站:DR_CAN
Dr. CAN学习笔记 - Kalman Filter卡尔曼滤波器 Ch05-3+4
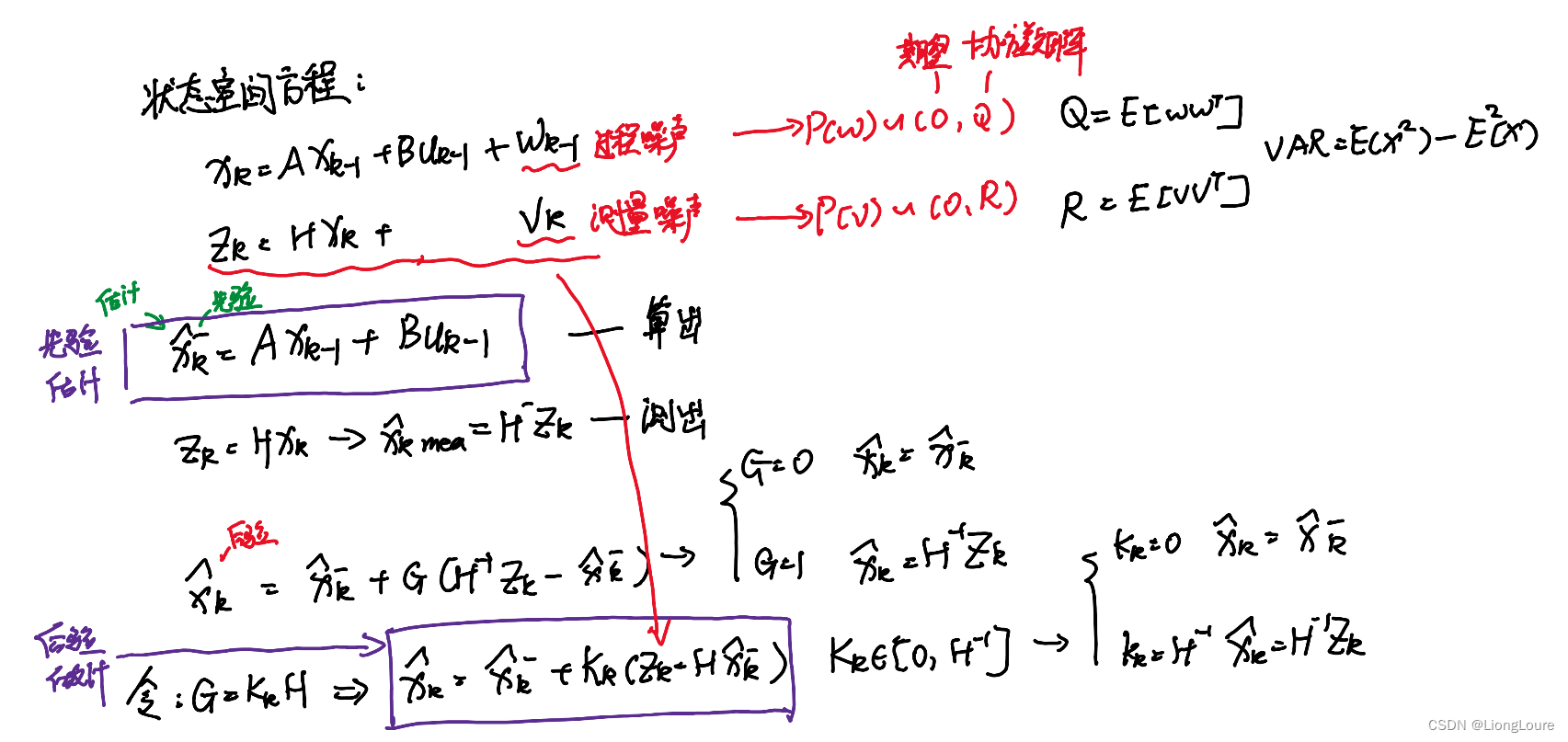
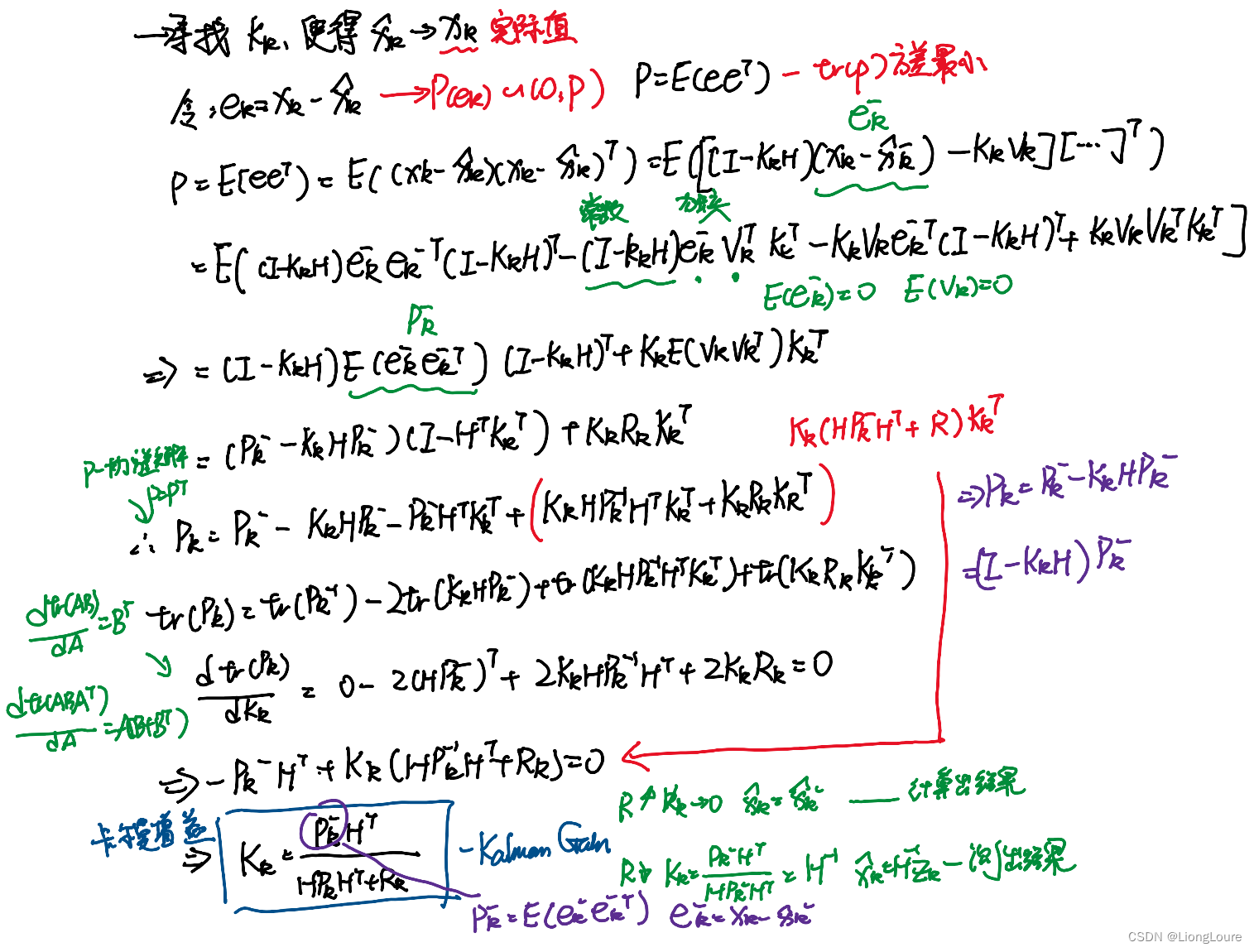
- 3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导
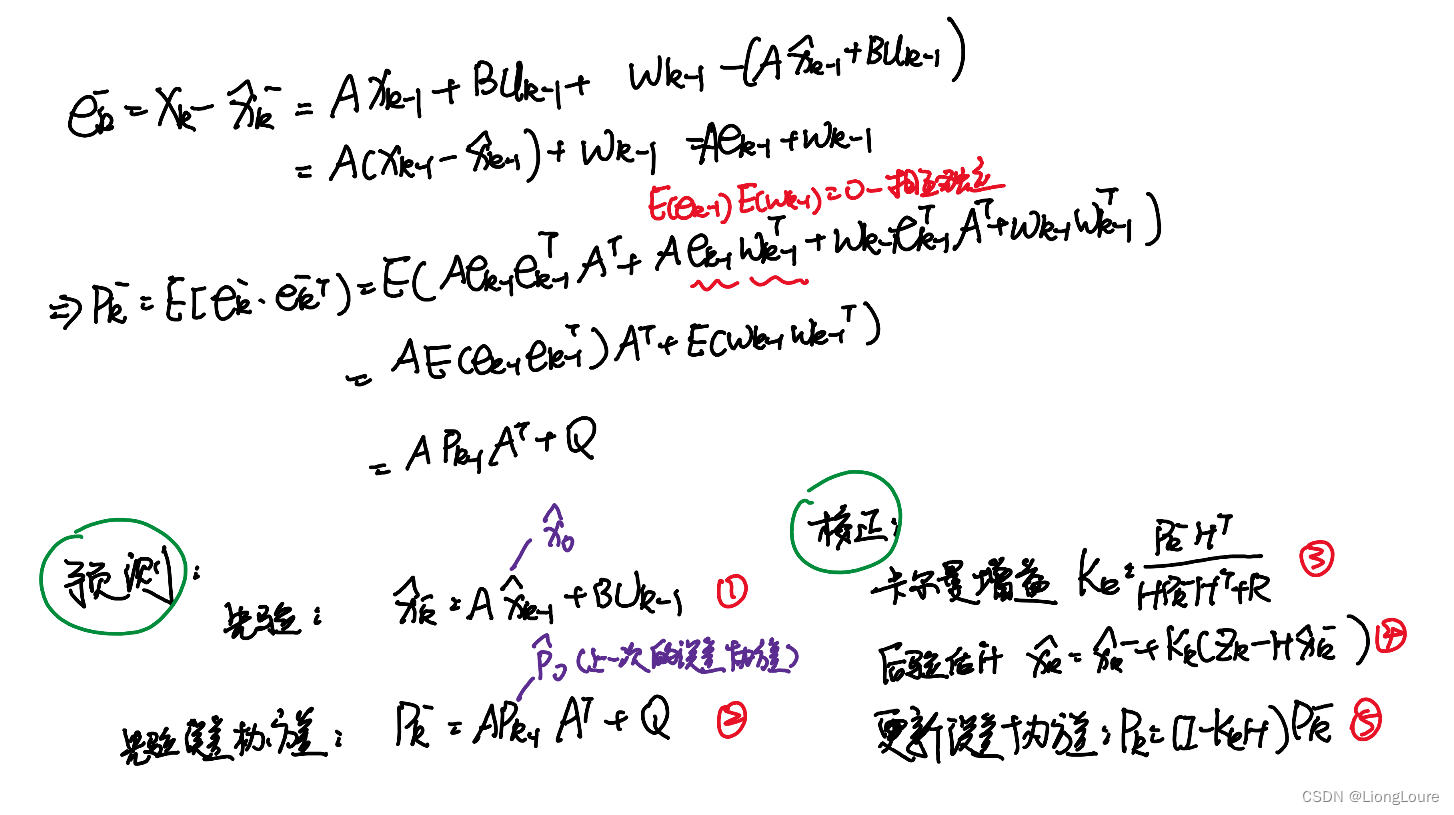
- 4. Priori/Posterrori error Covariance Martix 误差协方差矩阵
3. Step by step : Deriation of Kalmen Gain 卡尔曼增益/因数 详细推导
4. Priori/Posterrori error Covariance Martix 误差协方差矩阵
这篇关于[足式机器人]Part2 Dr. CAN学习笔记- Kalman Filter卡尔曼滤波器Ch05-3+4的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





