估计专题

数据集 3DPW-开源户外三维人体建模-姿态估计-人体关键点-人体mesh建模 >> DataBall
3DPW 3DPW-开源户外三维人体建模数据集-姿态估计-人体关键点-人体mesh建模 开源户外三维人体数据集 @inproceedings{vonMarcard2018, title = {Recovering Accurate 3D Human Pose in The Wild Using IMUs and a Moving Camera}, author = {von Marc

数据集 Ubody人体smplx三维建模mesh-姿态估计 >> DataBall
Ubody开源人体三维源数据集-smplx-三维建模-姿态估计 UBody:一个连接全身网格恢复和真实生活场景的上半身数据集,旨在拟合全身网格恢复任务与现实场景之间的差距。 UBody包含来自多人的现实场景的1051k张高质量图像,这些图像拥有2D全身关键点、3D SMPLX模型。 UBody由国际数字经济学院(IDEA)提供。 (UBody was used for mesh r

Kaggle克隆github项目+文件操作+Kaggle常见操作问题解决方案——一文搞定,以openpose姿态估计项目为例
文章目录 前言一、Kaggle克隆仓库1、克隆项目2、查看目录 二、安装依赖三、文件的上传、复制、转移操作1.上传.pth文件到input目录2、将权重文件从input目录转移到工作目录 三、修改工作目录里的文件内容1、修改demo_camera.py内容 四、运行! 前言 想跑一些深度学习的项目,但是电脑没有显卡,遂看向云服务器Kaggle,这里可以每周免费使用30h的GP

【译】PCL官网教程翻译(18):估计一组点的视点特征直方图(VFH)签名 - Estimating VFH signatures for a set of points
英文原文查看 估计一组点的视点特征直方图(VFH)签名 本文描述了视点特征直方图([VFH])描述符,这是一种针对聚类(如对象)识别和6DOF姿态估计问题的点簇表示方法。 下图展示了一个VFH识别和姿态估计的例子。给定一组火车数据(除最左边的点云外,最上面一行、最下面一行),学习一个模型,然后使用一个云(最左边的部分)查询/测试模型。匹配的结果按从最好到最差的顺序从左到右从左下角开始。有关更多

分歧时间估计与被子植物的年代-文献精读43
Ad fontes: divergence-time estimation and the age of angiosperms 回归本源:分歧时间估计与被子植物的年代 摘要 准确的分歧时间对于解释和理解谱系演化的背景至关重要。在过去的几十年里,有关冠被子植物推测的分子年龄(通常估计为晚侏罗世至二叠纪)与化石记录(将被子植物置于早白垩纪)之间的差异,引发了广泛的争论。如果冠被子植物早在二

SLAM ORB-SLAM2(29)PnP估计姿态
SLAM ORB-SLAM2(29)PnP估计姿态 1. PnP问题2. EPnP算法2.1. 计算4对控制点的世界坐标2.2. 计算齐次质心坐标2.3. 计算4对控制点的相机坐标2.3.1. 构造M矩阵2.3.2. 计算 M T M M^TM MTM的0特征值对应的特征向量2.3.3. 计算零空间的秩2.3.4. 计算线性组合的系数 2.4. 选择最小重投影误差 3. 标题

损失函数、成本函数cost 、最大似然估计
一、损失函数 什么是损失函数? 【深度学习】一文读懂机器学习常用损失函数(Loss Function)-腾讯云开发者社区-腾讯云 损失函数(loss function)是用来估量模型的预测值f(x)与真实值Y的不一致程度,它是一个非负实值函数,通常使用L(Y, f(x))来表示,损失函数越小,模型的鲁棒性就越好。损失函数是经验风险函数的核心部分,也是结构风险函数重要组成部分。模型的结构风险函

End-to-End视觉里程计新突破:从运动模糊图像中精确估计相机姿态
更多优质内容,请关注公众号:智驾机器人技术前线 1.论文信息 论文标题:MBRVO: A Blur Robust Visual Odometry Based on Motion Blurred Artifact Prior 作者:Jialu Zhang, Jituo Li*, Jiaqi Li, Yue Sun, Xinqi Liu, Zhi Zheng, and Guodong Lu

【MATLAB源码-第253期】基于matlab的8PSK调制载波+相位+符号定时联合估计仿真,输出星座图等。
操作环境: MATLAB 2022a 1、算法描述 1. 系统背景和目标 8PSK是一种调制方式,其中信号的相位被分成8个不同的状态,每个状态代表3比特的数据。这个过程涉及将比特序列转换为相应的相位,经过调制后传输给接收端。在接收端,由于信号通过信道传播过程中可能受到噪声、频偏、符号定时偏差等因素的影响,接收到的信号相对于原始信号会有一定的失真。因此,接收端需要进行一系列处理来恢复原始数据
熵的相关概念及相互关系(信息熵,条件熵,相对熵,交叉熵,最大似然估计)
熵:系统混乱程度的度量,系统越混乱,熵越大。 信息熵:信息量的大小的度量,用于描述随机变量的不确定度。事件的不确定性越大,则信息量越大,信息熵越大。定义如下: 条件熵:表示在已知随机变量X的条件下随机变量Y的不确定性。定义如下: 另外,,说明描述X和Y所需的信息(H(X,Y)

基于x86 平台opencv的图像采集和seetaface6的人脸朝向姿态估计功能
目录 一、概述二、环境要求2.1 硬件环境2.2 软件环境 三、开发流程3.1 编写测试3.2 配置资源文件3.2 验证功能 一、概述 本文档是针对x86 平台opencv的图像采集和seetaface6的人脸朝向姿态估计功能,opencv通过摄像头采集视频图像,将采集的视频图像送给seetaface6的人脸朝向姿态估计模块从而实现人脸朝向姿态估计功能。 测试结果如下图所示:

概率统计Python计算:一元线性回归未知参数的区间估计
在博文《一元线性回归未知参数的点估计》中利用scipy.stats的linregress函数,计算了总体分布 N ( a x + b , σ 2 ) N(ax+b, \sigma^2) N(ax+b,σ2)的未知参数 a a a, b b b和 σ 2 \sigma^2 σ2的无偏估计 a ∧ \stackrel{\wedge}{a} a∧, b ∧ \stackrel{\wedge}{b} b

【MATLAB源码-第252期】基于matlab的STBC空时分组码MIMO-OFDM系统仿真,采用QPSK调制,训练符号信道估计,输出误码率曲线。
操作环境: MATLAB 2022a 1、算法描述 基于空时分组码(STBC)的多输入多输出正交频分复用(MIMO-OFDM)通信系统是一种先进的无线通信技术,它结合了MIMO和OFDM两种技术的优势,实现了高数据传输速率和增强的抗多径干扰能力。这种系统在现代无线通信中广泛应用,尤其是在需要高吞吐量和可靠性的环境中,比如4G和5G移动通信系统。 在MIMO-OFDM系统中,多个天线被用来同

AlphaPose姿态估计论文翻译和代码解读RMPE: Regional Multi-Person Pose Estimation
姿态估计模型AlphoPose模型的论文 或者论文V3版 ICCV2017接收,上海交大和腾讯优图的论文 代码 ,基于pytorch或者Tensorflow 如果想了解姿态估计的简单概述,可以点击我的另一篇综述文章 RMPE: Regional Multi-Person Pose Estimation Abstract 自然场景的多人姿态估计是一个极大的挑战。虽然最好的人类检测器已经有很好的

拥挤场景多人姿态估计论文梗概及代码CrowdPose: Efficient Crowded Scenes Pose Estimation and A New Benchmark
姿态估计是视频动作分析识别的基础工作,我有一篇小综述讲了姿态估计相关技术路线的发展,可以点这个链接看。 本文是MVIG大佬们发表在CVPR2019上的一篇论文,上号交通大学,基于AlphaPose思路,进一步提升了拥挤情况下准度 代码:github点这,基于Pytorch,是实时多人姿态估计系统 论文:论文点这 论文第二版点这 Abstract 多人姿态估计是大量计算机视觉任务的基础,近年来也

姿态估计Rethinking on Multi-Stage Networks for Human Pose Estimation论文梗概及代码解读
2018年COCO关键点检测冠军算法MSPN,姿态估计,Top-down的技术路线 应该是截止2019年10月26日时开源的最好的姿态估计算法之一了 旷世出品 代码链接点这,是基于Pytorch的 论文链接点这 摘要 姿态估计方法以基本形成one-stage 和 multi-stage两个路线 多阶段看上去更适合任务,但是现在多阶段的性能还是不如单阶段的 我们论文就来研究这个问题,我们讨论当下

多人姿态估计小小的综述
为什么叫小小综述呢,因为不从最开始综述起。只说一说近两年比较流行的姿态估计方法,以实用为主。毕竟对于我来说,这块更多是应用。单人的不好应用,就更多的说一说多人姿态估计。希望能对想入门姿态估计的朋友有一个快速的指引 入门简介 2014年引入CNN对单人姿态估计来进行解决,但是会有很多FP出现。引入MPII数据集,是W级别,之前的FLIC和LSP数据集都是K级别。 多人关键点检测数据集COCO 、
【论文精读】分类扩散模型:重振密度比估计(Revitalizing Density Ratio Estimation)
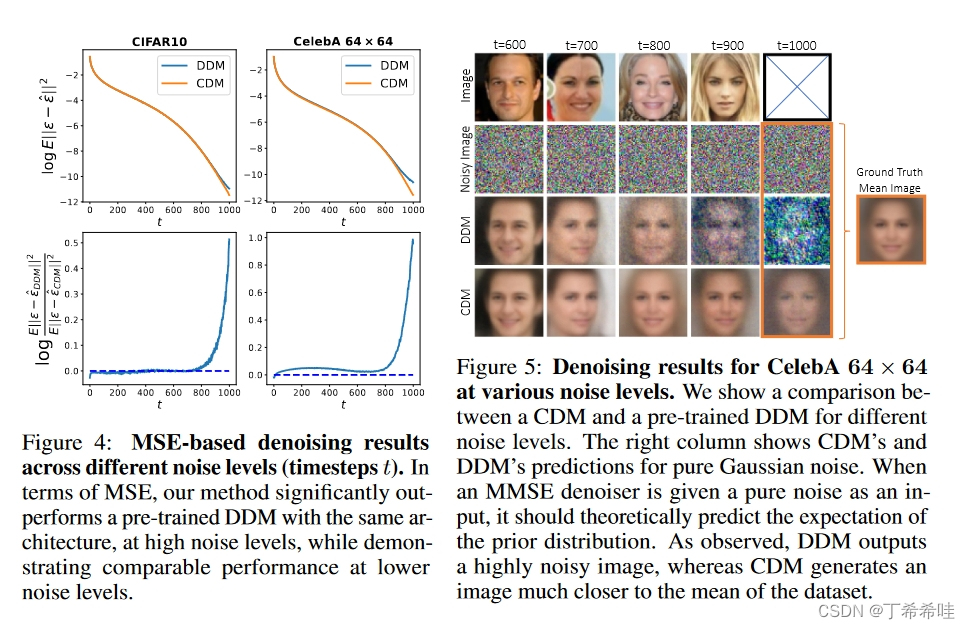
文章目录 一、文章概览(一)问题的提出(二)文章工作 二、理论背景(一)密度比估计DRE(二)去噪扩散模型 三、方法(一)推导分类和去噪之间的关系(二)组合训练方法(三)一步精确的似然计算 四、实验(一)使用两种损失对于实现最佳分类器的重要性(二)去噪结果、图像质量和负对数似然 论文:Classification Diffusion Models: Revitalizing
基于协方差信息的Massive MIMO信道估计算法性能研究
1. 引言 随着移动互联网不断发展,人们对通信的速率和可靠性的要求越来越高[1]。目前第四代移动通信系统已经逐渐商用,研究人员开始着手研究下一代移动通信系统相关技术[2][3]。在下一代移动通信系统中要求下行速率达到10Gbps,这就要求我们使用更先进的技术和更宽的系统带宽。MIMO技术由于可以在不增加系统带宽和功率的前提下,成倍的提升系统容量和可靠性,已经广泛应用于各种无线通信系统中,但仅采用

基于CDMA的多用户水下无线光通信(2)——系统模型和基于子空间的延时估计
本文首先介绍了基于CDMA的多用户UOWC系统模型,并给出了多用户收发信号的数学模型。然后介绍基于子空间的延时估计算法,该算法只需要已知所有用户的扩频码,然后根据扩频波形的循环移位在观测空间的信号子空间上的投影进行延时估计。 1、基于CDMA的多用户UOWC系统模型 首先介绍基于CDMA的多用户UOWC系统模型,系统框图如下图所示。 该系统包括发送端、UOWC信道和接收端。该系统

【C++PCL】点云处理稳健姿态估计配准
作者:迅卓科技 简介:本人从事过多项点云项目,并且负责的项目均已得到好评! 公众号:迅卓科技,一个可以让您可以学习点云的好地方 重点:每个模块都有参数如何调试的讲解,即调试某个参数对结果的影响是什么,大家有问题可以评论哈,如果文章有错误的地方,欢迎来指出错误的地方。 目录 1.原理介绍 2.代码效果 3.源码展示 4.

Depth Anything V2:抖音开源高性能任何单目图像深度估计V2版本,并开放具有精确注释和多样化场景的多功能评估基准
📜文献卡 题目: Depth Anything V2作者: Lihe Yang; Bingyi Kang; Zilong Huang; Zhen Zhao; Xiaogang Xu; Jiashi Feng; Hengshuang ZhaoDOI: 10.48550/arXiv.2406.09414摘要: This work presents Depth Anything V2. With

SAR动目标检测系列:【4】动目标二维速度估计
在三大类杂波抑制技术(ATI、DPCA和STAP)中,STAP技术利用杂波与动目标在二维空时谱的差异,以信噪比最优为准则,对地杂波抑制的同时有效保留动目标后向散射能量,有效提高运动目标的检测概率和动目标信号输出信杂比,提供理想的动目标检测效果。在检测出动目标之后,接下来的任务是对剩余杂波和噪声中的动目标精确地估计参数。动目标精确参数估计一般是在方位信号中完成的,对图

PCL 点云法向量估计
点云法向量估计 一、代码示例二、运行结果 🙋 前言 点云法向量估计(normalEstimation):是一种计算点云中每个点的法向量的方法。点云法向量是描述点云表面方向的一种重要属性,可以用于点云分割、特征提取和重建等应用。 一、代码示例 #include <vtkAutoInit.h>VTK_MODULE_INIT(vtkRenderingOpenGL);#i

基于估计的无约束预测控制
这一节讨论状态不是全部可以测量或有测量噪声的情况下,基于状态估计的无约束预测控制。 一、状态估计 如果状态不是全部可以测量或有测量噪声,则需要估计状态或滤波。设系统的可测量输出变量 y m ( k ) = C m x ( k ) y_m(k)=C_mx(k) ym(k)=Cmx(k) 考虑下面的估计器形式: x ^ ( k + 1 ) = A x ^ ( k ) + B u u (

MATLAB概率密度估计有关的函数
参数估计 mle Maximum likelihood estimates mle是有偏估计 fitdist 对数据进行概率分布对象拟合 histfit 具有分布拟合的直方图 fitdist和histfit是无偏估计,这两者区别在于histfit直接画出直方图。 支持的分布点这里 非参数估计 ksdensity Kernel smoothing function estimate for u