本文主要是介绍非线性滤波——基于EKF的INS/GPS松组合算法的研究(间接法|EKF|欧拉角),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在之前的博文《非线性滤波——基于EKF的INS/GPS松组合算法的研究(直接法|EKF|欧拉角)》中,我们记录了直接形式的EKF实现INS/GPS松组合算法,并在《卡尔曼滤波——直接法VS间接法》中对比说明了直接法与间接法的优劣。本文,我们记录使用间接反馈校正形式的EKF算法实现INS/GPS松组合算法。
建立模型
本文的INS/GPS组合模型主要参考文献:
Barton, Jeffrey. (2012). Fundamentals of Small Unmanned Aircraft Flight. Johns Hopkins Apl Technical Digest. 31. 132-149.
实验数据来源于之前的博客:非线性滤波——INS/GPS组合导航仿真数据的生成
INS/GPS的松组合模型可以用状态方程和测量方程描述与《非线性滤波——基于EKF的INS/GPS松组合算法的研究(直接法|EKF|欧拉角)》中一致,此处将其简记为
x ˙ = f ( x ) + w ( t ) , w ( t ) ∼ N ( 0 , Q ) \dot{\bold{x}}=f(\bold{x})+\bold{w}(t), \mathbf{w}(t) \sim N(0, \mathbf{Q}) x˙=f(x)+w(t),w(t)∼N(0,Q)
z ˉ = h ( x ) + v ( t ) , v ( t ) ∼ N ( 0 , R ) \bar{\bold{z}}=h(\bold{x})+\bold{v}(t), \mathbf{v}(t) \sim N(0, \mathbf{R}) zˉ=h(x)+v(t),v(t)∼N(0,R)
假设在时刻 t t t的状态 x ( t ) \bold{x}(t) x(t)是未知的,但我们知道其大致范围,则可以选定一个值 x ∗ ( t ) \bold{x}^*(t) x∗(t),只要得到了 δ x ( t ) = x ( t ) − x ∗ ( t ) \bold{\delta x}(t)=\bold{x}(t)-\bold{x}^{*}(t) δx(t)=x(t)−x∗(t)的估计,就可以修正 x ∗ ( t ) \bold{x}^*(t) x∗(t),从而得到对 x ( t ) \bold{x}(t) x(t)更准确的估计。
在选取 x ∗ ( t ) \bold{x}^*(t) x∗(t)时需要满足以下关系
x ∗ ( t ) = f ( x ∗ ( t ) ) \bold{x}^*(t) = f(\bold{x}^*(t)) x∗(t)=f(x∗(t))
z ∗ ( t ) = h ( x ∗ ( t ) ) \bold{z}^*(t)=h(\bold{x}^*(t)) z∗(t)=h(x∗(t))
将上面两个方程与模型本身相减,并用泰勒级数展开,略去高阶项,得到
δ x ˙ ( t ) = F ( t ) δ x ( t ) + w ( t ) \delta \dot {\bold{{x}}}(t)=\boldsymbol{F}(t) \delta \bold{x}(t)+\bold{w}(t) δx˙(t)=F(t)δx(t)+w(t)
δ z = H ( t ) δ x ( t ) + v ( t ) \delta{\bold{z}}=\boldsymbol{H}(t) \delta \bold{x}(t)+\bold{v}(t) δz=H(t)δx(t)+v(t)
其中
F ( t ) = ∂ f ∂ x ∣ x ∗ , H ( t ) = ∂ h ∂ x ∣ x ∗ \boldsymbol{F}(t)=\left.\frac{\partial f}{\partial x}\right|_{x^{*}}, \boldsymbol{H}(t)=\left.\frac{\partial \boldsymbol{h}}{\partial \boldsymbol{x}}\right|_{x^{*}} F(t)=∂x∂f∣∣∣∣x∗,H(t)=∂x∂h∣∣∣∣x∗
其余步骤与之前的博文《非线性滤波——基于EKF的INS/GPS松组合算法的研究(直接法|EKF|欧拉角)》相同。
特别注意: 在程序中对误差状态量进行一步预测时,与直接法不同,需要将误差状态的一步预测值置零。因为在最后一步状态修正中
x ^ k + 1 ∣ k + 1 = x ^ k + 1 ∣ k + δ x ^ k + 1 ∣ k + 1 \hat{\bold{x}}_{k+1 | k+1}=\hat{\bold{x}}_{k+1 | k}+\delta \hat{\bold{x}}_{k+1 | k+1} x^k+1∣k+1=x^k+1∣k+δx^k+1∣k+1
经过修正后有
x ^ k + 1 ∣ k + 1 = E { x ( t k + 1 ) } \widehat{\bold{x}}_{k+1 | k+1}=E\left\{\bold{x}\left(t_{k+1}\right)\right\} x k+1∣k+1=E{x(tk+1)}
所以 δ x ^ k + 1 ∣ k + 1 = 0 \delta \hat{\bold{x}}_{k+1 | k+1}=0 δx^k+1∣k+1=0,也就 δ x ^ k ∣ k = 0 \delta \hat{\bold{x}}_{k | k}=0 δx^k∣k=0
仿真实现
本文代码在github及gitee(国内镜像)中不定时维护,代码内容可能与本文有所出入,地址:
https://github.com/tsuibeyond/BasicEKF
https://gitee.com/tsuibeyond/BasicEKF
clc
clear % 生成仿真数据
generate_uav_sensors_structure;% 重力加速度常量,m/s^2
g_mps2 = 9.81; % 定义directEKF算法相关变量
ekf = [];
% 磁强计和GPS测量噪声估计,用于构造 R 矩阵
ekf.sigmas.mag2D_meas_rad = sqrt(uavSensors.sigmas.mag2D_yaw_noise_rad^2);
ekf.sigmas.pos_meas_m = sqrt(uavSensors.sigmas.GPSpos_noise_m^2);
ekf.sigmas.vel_meas_mps = sqrt(uavSensors.sigmas.GPSvel_noise_mps^2);
ekf.R_gps = diag([...[1 1 1]*ekf.sigmas.pos_meas_m ... % North-East-Alt position measurement noise, m[1 1 1]*ekf.sigmas.vel_meas_mps ... % NED velocity measurement noise, m/s].^2);
ekf.R_gps = max(ekf.R_gps,(1e-3)^2*eye(size(ekf.R_gps)));
ekf.R_mag2d = ekf.sigmas.mag2D_meas_rad;
ekf.R_mag2d = max(ekf.R_mag2d,(1e-3)^2*eye(size(ekf.R_mag2d))); % 陀螺仪和加速度计初始估计的不确定度,用于构造P矩阵(协方差矩阵)
ekf.sigmas.gyro_bias_rps = uavSensors.sigmas.gyro_bias_rps;
ekf.sigmas.accel_bias_mps2 = uavSensors.sigmas.accel_bias_mps2;% EKF过程噪声估计,用于构造 Q 矩阵
% Q 矩阵需要根据经验调节。Q 值代表了我们对状态模型的置信程度
ekf.sigmas.attitude_process_noise_rad = 0.002;%0.002;% Euler angle process noise, rad
ekf.sigmas.pos_process_noise_m = 0.005;%0; % Position process noise, m
ekf.sigmas.vel_process_noise_mps = 0.001;%2; % Velocity process noise, m/s
ekf.sigmas.gyroBias_process_noise_rps = 1e-5;%1e-6; % Gyro bias process noise, rad/s
ekf.sigmas.accelBias_process_noise_mps2=1e-5;%1e-6; % Accel bias process noise, m/s^2
ekf.Q = diag([...[1 1 1]*ekf.sigmas.attitude_process_noise_rad ... % Euler angle process noise, rad[1 1 1]*ekf.sigmas.pos_process_noise_m ... % North-East-Alt position process noise, m[1 1 1]*ekf.sigmas.vel_process_noise_mps ... % NED velocity process noise, m/s[1 1 1]*ekf.sigmas.gyroBias_process_noise_rps ... % XYZ gyro bias process noise, rad/s[1 1 1]*ekf.sigmas.accelBias_process_noise_mps2 ... % XYZ accel bias process noise, m/s^2].^2);
ekf.Q = max(ekf.Q,(1e-3)^2*eye(size(ekf.Q))); % 设定EKF状态误差向量初始值
err_euler_init = [ 0 0 0 ]; % 欧拉角误差初始值, rad
err_pos_init = [ 0 0 0 ];
err_vel_init = [ 0 0 0 ];
ekf.xhat_err = [ ...err_euler_init ... % 1-3: 对 Euler angle (Roll, Pitch, Yaw) 状态进行初始化,raderr_pos_init ... % 4-6: 对 North-East-Alt 位置状态进行初始化, merr_vel_init ... % 7-9: 对 NED 速度状态初始化, m/s[0 0 0] ... % 10-12: 对 XYZ 三轴陀螺仪的常值偏差进行初始化, rad/s[0 0 0] ... % 13-15: 对 XYZ 三轴加速度计的长治偏差进行初始化, m/s^2]';
clear err_euler_init err_pos_init err_vel_init% 设定EKF状态向量初始值
phi = 0; % 横滚角初始值,rad
theta=0; % 俯仰角初始值,rad
psi = uavSensors.mag2D_yaw_deg(1)*pi/180; % 偏航角初始值, rad
euler_init = [ phi theta psi ];
pos_init = [ uavSensors.GPS_north_m(1) uavSensors.GPS_east_m(1) uavSensors.GPS_h_msl_m(1) ];
vel_init = uavSensors.GPS_v_ned_mps(1,:);
ekf.xhat_ins = [ ...euler_init ... % 1-3: 对 Euler angle (Roll, Pitch, Yaw) 状态进行初始化,radpos_init ... % 4-6: 对 North-East-Alt 位置状态进行初始化, mvel_init ... % 7-9: 对 NED 速度状态初始化, m/s[0 0 0] ... % 10-12: 对 XYZ 三轴陀螺仪的常值偏差进行初始化, rad/s[0 0 0] ... % 13-15: 对 XYZ 三轴加速度计的长治偏差进行初始化, m/s^2]';
clear psi theta phi euler_init pos_init vel_init% 对初始的协方差矩阵(P矩阵)设定较大值,以便EKF算法在初始的几次滤波步骤中更多的相信测量方程
large_angle_uncertainty_rad = 30*pi/180;
large_pos_uncertainty_m = 100;
large_vel_uncertainty_mps = 10;
ekf.P = diag([...[1 1 1]*large_angle_uncertainty_rad ... % init Euler angle (NED-to-body) uncertainties, rad[1 1 1]*large_pos_uncertainty_m ... % init North-East-Alt position uncertainties, m[1 1 1]*large_vel_uncertainty_mps ... % init NED velocity uncertainties, m/s[1 1 1]*ekf.sigmas.gyro_bias_rps ... % init XYZ gyro bias uncertainties, rad/s[1 1 1]*ekf.sigmas.accel_bias_mps2 ... % init XYZ accel bias uncertainties, m/s^2].^2);
ekf.P = max(ekf.P,(1e-3)^2*eye(size(ekf.P))); % 为了避免gyro_bias_rps和accel_bias_mps2设定为0
clear large_angle_uncertainty_rad large_pos_uncertainty_m large_vel_uncertainty_mps% 定义uavEst结构体并分配内存空间,用于存储估计的中间结果
uavEst.xhat = zeros(length(uavTruth.time_s),length(ekf.xhat_ins));
uavEst.P = zeros(length(uavTruth.time_s),length(ekf.xhat_ins));for kTime = 1 : length(uavSensors.time_s)% 计算两次滤波的时间间隔time_s = uavSensors.time_s(kTime);if kTime == 1dt_s = uavSensors.time_s(2) - uavSensors.time_s(1);elsedt_s = time_s - uavSensors.time_s(kTime-1);end% 获取滤波器所估计的状态量phi=ekf.xhat_ins(1); theta=ekf.xhat_ins(2); psi=ekf.xhat_ins(3); % Roll, Pitch, Yaw Euler angles, radPn=ekf.xhat_ins(4); Pe=ekf.xhat_ins(5); Alt=ekf.xhat_ins(6); % Position, North/East/Altitude, metersVn=ekf.xhat_ins(7); Ve=ekf.xhat_ins(8); Vd=ekf.xhat_ins(9); % Velocity, North/East/Down, m/sbwx=ekf.xhat_ins(10); bwy=ekf.xhat_ins(11); bwz=ekf.xhat_ins(12); % Gyro biases, rad/sbax=ekf.xhat_ins(13); bay=ekf.xhat_ins(14); baz=ekf.xhat_ins(15); % Accelerometer biases, m/s^2% IMU 更新gyro_wb_rps = uavSensors.gyro_wb_rps(kTime,:)'; % 3x1 vectoraccel_fb_mps2 = uavSensors.accel_fb_mps2(kTime,:)'; % 3x1 vectorwx = gyro_wb_rps(1); wy = gyro_wb_rps(2); wz = gyro_wb_rps(3); % rad/sfx = accel_fb_mps2(1); fy = accel_fb_mps2(2); fz = accel_fb_mps2(3); % m/s^2% 计算 xdotC_bodyrate2eulerdot = [1 sin(phi)*tan(theta) cos(phi)*tan(theta); ...0 cos(phi) -sin(phi) ; ...0 sin(phi)*sec(theta) cos(phi)*sec(theta)];C_ned2b = [cos(theta)*cos(psi) cos(theta)*sin(psi) -sin(theta); ...sin(phi)*sin(theta)*cos(psi)-cos(phi)*sin(psi) sin(phi)*sin(theta)*sin(psi)+cos(phi)*cos(psi) sin(phi)*cos(theta); ...cos(phi)*sin(theta)*cos(psi)+sin(phi)*sin(psi) cos(phi)*sin(theta)*sin(psi)-sin(phi)*cos(psi) cos(phi)*cos(theta)];C_b2ned=transpose(C_ned2b);xdot = [ ...C_bodyrate2eulerdot*([wx;wy;wz]-[bwx;bwy;bwz]); ... % Derivative of [roll; pitch; yaw][Vn; Ve; -Vd]; ... % Derivative of [Pn; Pe; Alt]C_b2ned*([fx;fy;fz]-[bax;bay;baz])+[0;0;g_mps2]; ... % Derivative of [Vn; Ve; Vd][0;0;0]; ... % Derivative of [bwx; bwy; bwz][0;0;0]; ... % Derivative of [bax; bay; baz]];% 计算 F 矩阵F = [ ...[ sin(phi)*tan(theta)*(bwz - wz) - cos(phi)*tan(theta)*(bwy - wy), - cos(phi)*(bwz - wz)*(tan(theta)^2 + 1) - sin(phi)*(bwy - wy)*(tan(theta)^2 + 1), 0, 0, 0, 0, 0, 0, 0, -1, -sin(phi)*tan(theta), -cos(phi)*tan(theta), 0, 0, 0][ cos(phi)*(bwz - wz) + sin(phi)*(bwy - wy), 0, 0, 0, 0, 0, 0, 0, 0, 0, -cos(phi), sin(phi), 0, 0, 0][ (sin(phi)*(bwz - wz))/cos(theta) - (cos(phi)*(bwy - wy))/cos(theta), - (cos(phi)*sin(theta)*(bwz - wz))/cos(theta)^2 - (sin(phi)*sin(theta)*(bwy - wy))/cos(theta)^2, 0, 0, 0, 0, 0, 0, 0, 0, -sin(phi)/cos(theta), -cos(phi)/cos(theta), 0, 0, 0][ 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 0, 0, -1, 0, 0, 0, 0, 0, 0][ - (sin(phi)*sin(psi) + cos(phi)*cos(psi)*sin(theta))*(bay - fy) - (cos(phi)*sin(psi) - cos(psi)*sin(phi)*sin(theta))*(baz - fz), cos(psi)*sin(theta)*(bax - fx) - cos(phi)*cos(psi)*cos(theta)*(baz - fz) - cos(psi)*cos(theta)*sin(phi)*(bay - fy), (cos(phi)*cos(psi) + sin(phi)*sin(psi)*sin(theta))*(bay - fy) - (cos(psi)*sin(phi) - cos(phi)*sin(psi)*sin(theta))*(baz - fz) + cos(theta)*sin(psi)*(bax - fx), 0, 0, 0, 0, 0, 0, 0, 0, 0, -cos(psi)*cos(theta), cos(phi)*sin(psi) - cos(psi)*sin(phi)*sin(theta), - sin(phi)*sin(psi) - cos(phi)*cos(psi)*sin(theta)][ (cos(psi)*sin(phi) - cos(phi)*sin(psi)*sin(theta))*(bay - fy) + (cos(phi)*cos(psi) + sin(phi)*sin(psi)*sin(theta))*(baz - fz), sin(psi)*sin(theta)*(bax - fx) - cos(phi)*cos(theta)*sin(psi)*(baz - fz) - cos(theta)*sin(phi)*sin(psi)*(bay - fy), (cos(phi)*sin(psi) - cos(psi)*sin(phi)*sin(theta))*(bay - fy) - (sin(phi)*sin(psi) + cos(phi)*cos(psi)*sin(theta))*(baz - fz) - cos(psi)*cos(theta)*(bax - fx), 0, 0, 0, 0, 0, 0, 0, 0, 0, -cos(theta)*sin(psi), - cos(phi)*cos(psi) - sin(phi)*sin(psi)*sin(theta), cos(psi)*sin(phi) - cos(phi)*sin(psi)*sin(theta)][ cos(theta)*sin(phi)*(baz - fz) - cos(phi)*cos(theta)*(bay - fy), cos(theta)*(bax - fx) + cos(phi)*sin(theta)*(baz - fz) + sin(phi)*sin(theta)*(bay - fy), 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, sin(theta), -cos(theta)*sin(phi), -cos(phi)*cos(theta)][ 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]]; % 计算 PHI_k & Q_k 矩阵(一步预测矩阵 和 离散形式的过程噪声矩阵)nStates = length(ekf.xhat_ins);AA = [-F ekf.Q; zeros(nStates,nStates) F']*dt_s;BB = expm(AA); % <- Matrix exponential!PHI_k = BB(nStates+1:2*nStates,nStates+1:2*nStates)';Q_k = PHI_k*BB(1:nStates,nStates+1:2*nStates);% 一步预测 & 更新协方差ekf.xhat_ins = ekf.xhat_ins + xdot*dt_s;ekf.xhat_err = 0*ekf.xhat_err;ekf.P = PHI_k*ekf.P*PHI_k' + Q_k;% 磁强计测量融合(更新频率与IMU一致)mag2D_yaw_rad = uavSensors.mag2D_yaw_deg(kTime)*pi/180;ekf.H_mag2d = [ 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0];ekf.K_mag2d = (ekf.P*ekf.H_mag2d')/(ekf.H_mag2d*ekf.P*ekf.H_mag2d'+ekf.R_mag2d);% 消除yaw角的范围约束while mag2D_yaw_rad>ekf.xhat_ins(3)+pi, mag2D_yaw_rad=mag2D_yaw_rad-2*pi; endwhile mag2D_yaw_rad<ekf.xhat_ins(3)-pi, mag2D_yaw_rad=mag2D_yaw_rad+2*pi; end
% ekf.Z_mag2d = mag2D_yaw_rad;ekf.Z_mag2d_err = mag2D_yaw_rad - ekf.H_mag2d*ekf.xhat_ins;ekf.xhat_err = ekf.xhat_err + ekf.K_mag2d*(ekf.Z_mag2d_err - ekf.H_mag2d*ekf.xhat_err);ekf.P = (eye(length(ekf.xhat_ins))-ekf.K_mag2d*ekf.H_mag2d)*ekf.P;ekf.xhat_ins = ekf.xhat_ins + ekf.xhat_err;% GPS 测量更新 (更新频率较低)GPS_east_m = uavSensors.GPS_east_m(kTime);GPS_north_m = uavSensors.GPS_north_m(kTime);GPS_h_msl_m = uavSensors.GPS_h_msl_m(kTime);GPS_v_ned_mps = uavSensors.GPS_v_ned_mps(kTime,:)'; % 3x1 vectorGPS_valid = uavSensors.GPS_valid(kTime);if GPS_validekf.H_gps = [ ...[ 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0][ 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0]];ekf.K_gps = (ekf.P*ekf.H_gps')/(ekf.H_gps*ekf.P*ekf.H_gps'+ekf.R_gps);ekf.Z_gps = [ ...[GPS_north_m; GPS_east_m; GPS_h_msl_m];GPS_v_ned_mps];ekf.Z_gps_err = ekf.Z_gps - ekf.H_gps*ekf.xhat_ins;ekf.xhat_err = ekf.xhat_err + ekf.K_gps*(ekf.Z_gps_err - ekf.H_gps*ekf.xhat_err);ekf.P = (eye(length(ekf.xhat_ins))-ekf.K_gps*ekf.H_gps)*ekf.P;ekf.xhat_ins = ekf.xhat_ins + ekf.xhat_err;end% uavEst.xhat(kTime,:) = ekf.xhat_ins';
enduavEst.time_s = uavSensors.time_s;
uavEst.north_m = uavEst.xhat(:,4);
uavEst.east_m = uavEst.xhat(:,5);
uavEst.h_msl_m = uavEst.xhat(:,6);
uavEst.v_ned_mps = uavEst.xhat(:,7:9);
uavEst.roll_deg = rad2deg(uavEst.xhat(:,1));
uavEst.pitch_deg = rad2deg(uavEst.xhat(:,2));
uavEst.yaw_deg = rad2deg(uavEst.xhat(:,3));% 估计结果可视化
figure(1)
clf;
% 绘图的线型和点型设置
truthLineType = 'b-';
sensedLineType = 'gd';
estimateLineType = 'r.';
markerSize = 6;
linewidth = 2;% 北-东方向的位置估计结果
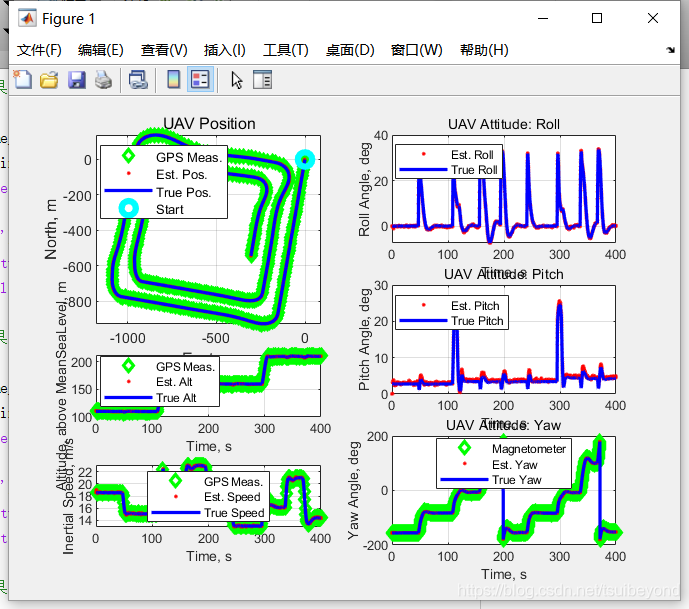
subplot(4,2,[1 3])
plot(uavSensors.GPS_east_m, uavSensors.GPS_north_m, sensedLineType, ...uavEst.east_m, uavEst.north_m, estimateLineType, ...uavTruth.east_m, uavTruth.north_m, truthLineType, ...'markersize',markerSize, 'linewidth', linewidth);
hold on
plot(uavTruth.east_m(1),uavTruth.north_m(1),'co', ...'markersize',1.5*markerSize, 'linewidth', 2*linewidth);
hold off
axis equal
grid on
xlabel('East, m'); ylabel('North, m')
title('UAV Position')
legend('GPS Meas.','Est. Pos.','True Pos.','Start','location','best')% 海拔高度估计结果
subplot(4,2,5)
plot(uavSensors.time_s, uavSensors.GPS_h_msl_m, sensedLineType, ...uavEst.time_s, uavEst.h_msl_m, estimateLineType, ...uavTruth.time_s, uavTruth.h_msl_m, truthLineType, ...'markersize',markerSize, 'linewidth', linewidth);
grid on
xlabel('Time, s'); ylabel('Altitude, above MeanSeaLevel, m')
legend('GPS Meas.','Est. Alt','True Alt','location','best')% 北-东-地 速度估计结果
subplot(4,2,7)
mag = @(v)(sqrt(sum(v.^2,2))); % magnitude of each row
plot(uavSensors.time_s, mag(uavSensors.GPS_v_ned_mps), sensedLineType, ...uavEst.time_s, mag(uavEst.v_ned_mps), estimateLineType, ...uavTruth.time_s, mag(uavTruth.v_ned_mps), truthLineType, ...'markersize',markerSize, 'linewidth', linewidth);
grid on
xlabel('Time, s'); ylabel('Inertial Speed, m/s')
legend('GPS Meas.','Est. Speed','True Speed','location','best')% 横滚角估计结果
subplot(3,2,2);
plot(uavEst.time_s, uavEst.roll_deg, estimateLineType, ...uavTruth.time_s, uavTruth.roll_deg, truthLineType, ... 'markersize',markerSize, 'linewidth', linewidth);
grid on
xlabel('Time, s'); ylabel('Roll Angle, deg')
title('UAV Attitude: Roll')
legend('Est. Roll','True Roll','location','best')% 俯仰角估计结果
subplot(3,2,4);
plot(uavEst.time_s, uavEst.pitch_deg, estimateLineType, ...uavTruth.time_s, uavTruth.pitch_deg, truthLineType, ... 'markersize',markerSize, 'linewidth', linewidth);
grid on
xlabel('Time, s'); ylabel('Pitch Angle, deg')
title('UAV Attitude: Pitch')
legend('Est. Pitch','True Pitch','location','best')% 偏航角估计结果(-180,180)
subplot(3,2,6);
wrap = @(angleDeg)(mod(angleDeg+180,360)-180); % Wrap from -180deg to 180deg.
plot(uavSensors.time_s, wrap(uavSensors.mag2D_yaw_deg), sensedLineType, ...uavEst.time_s, wrap(uavEst.yaw_deg), estimateLineType, ...uavTruth.time_s, wrap(uavTruth.yaw_deg), truthLineType, ... 'markersize',markerSize, 'linewidth', linewidth);
grid on
xlabel('Time, s'); ylabel('Yaw Angle, deg')
title('UAV Attitude: Yaw')
legend('Magnetometer','Est. Yaw','True Yaw','location','best')仿真结果
这篇关于非线性滤波——基于EKF的INS/GPS松组合算法的研究(间接法|EKF|欧拉角)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









