gps专题

CST软件如何仿真GPS上半球空间的辐射占比
手机GPS天线测试,除了关心常规指标外,通常还要评估天线上半空间和下半空间的辐射比,以了解GPS天线真正有用的辐射效率有多少。本期将以GPS天线为例介绍在CST中如何仿真GPS上下空间的辐射比。 这里用Antenna Magus库,创建了一个IFA天线用来做本例的演示,如下图所示: 要进行方向图分析,需要设置一个远场频点的监视器,例如1.575GHz。然后仿真得到天线的远场方向图如下图所示

settings数据库查看location(GPS)设置模式的命令
App层 Android平台中,GPS的开启和关闭主要在设置中: 其模式有三种: 1.High accruacy 高精度 使用GPS,Networks,Wi-Fi和Bluetooth进行定位, 准确度最好,但比较费电 2.Battery saving 使用Wi-Fi, Bluetooth和Networks进行定位, 速度快,省电,但是精度较差。 3.Device only 只使用GPS进行定位

根据GPS获取手机位置
根据GPS获取手机位置坐标的类 package com.wjy.project.railway.tools;import android.Manifest;import android.app.Service;import android.content.Intent;import android.content.SharedPreferences;import android.cont

在Postgresql中计算工单的对应的GPS轨迹距离
一、概述 在某个App开发中,要求记录用户的日常轨迹,在用户巡逻设备的时,将记录的轨迹点当做该设备巡逻时候的轨迹。 由于业务逻辑上没有明确的指示人员巡逻工单-GPS位置之间的关系,所以通过时间关系进行轨迹划定。 二、创建测试表 首先创建测试表,包括用户表、工单表以及GPS轨迹表。 用户表 --用户表CREATE TABLE a_users (userid varchar NUL

《Linux操作系统-系统移植》第8章 USB-4G/LTE移植 -第3节 USB-4G移植(移远AG35开发-GPS解析及编程)
查看参考手册,移远带有GPS的芯片的USB Serial如下。 2.1应用简介 1、若不使用 AT+QGPSCFG 指令对AG35进行配置,则会以默认参数开启GPS参数,NMEA端口开始上报,"gpsnmeatype"默认值为31,上报间隔为1s,每次上报所有种类的NMEA数据(GGA\RMC\GSV\GSA\VTG),若采用此默认配置,大多数使用者会觉得单次上报的数据太多且很多信息重复,建

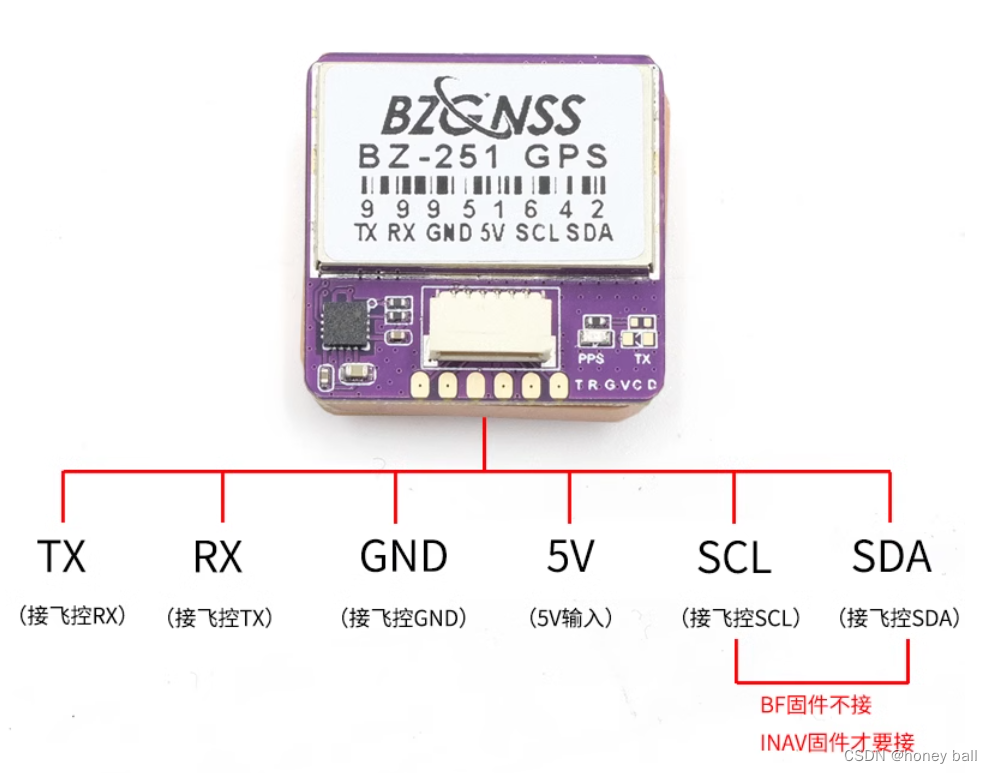
STM32——GPS模块(GY-NEO-6M)
1连接 1-1 使用 USB-TTL 工具,安装好驱动,可以在”设备管理器看到对应COM”按照如下链接测试模块: USB-TTL GPS 模块 3.3V--------------------------------->VCC GND------------------------------>GND RXD------------------------------>TXD TX

webview下js的gps定位
webview下js的gps定位 <html><head><title>Js调用Android</title></head><body><input type="button" value="Toast提示" onclick="myObj.startGps();"/><input type="button" value="列表对话框" onclick="myObj.showDialog(
时间服务器中,适用于国内的 NTP 服务器地址,可用于时间同步或 Android 加速 GPS 定位
NTP 是什么? NTP 是网络时间协议(Network Time Protocol),它用来同步网络设备【如计算机、手机】的时间的协议。 NTP 实现什么目的? 目的很简单,就是为了提供准确时间。因为我们的手表、设备等,经常会时间跑着跑着就有误差,或快或慢的少几秒,时间长了甚至误差过分钟。 NTP 服务器列表 最常见、熟知的就是 www.pool.ntp.org/zo

基于51的单片机GPS定位系统设计
一.硬件方案 本设计主要是制作出一款基于51单片机的GPS定位器,根据设计需求,硬件部分主要由51单片机+GPS定位模块+LCD12864液晶+LED指示灯+3.3V稳压电路+天线设计而成; 二.设计功能 (1)单片机选用:51单片机(STC89C51/52、AT89C51/52、AT90C51/52均可兼容),GPS定位模块(带天线)。 (2)采用LCD12864液晶显示当前的时间、日期、
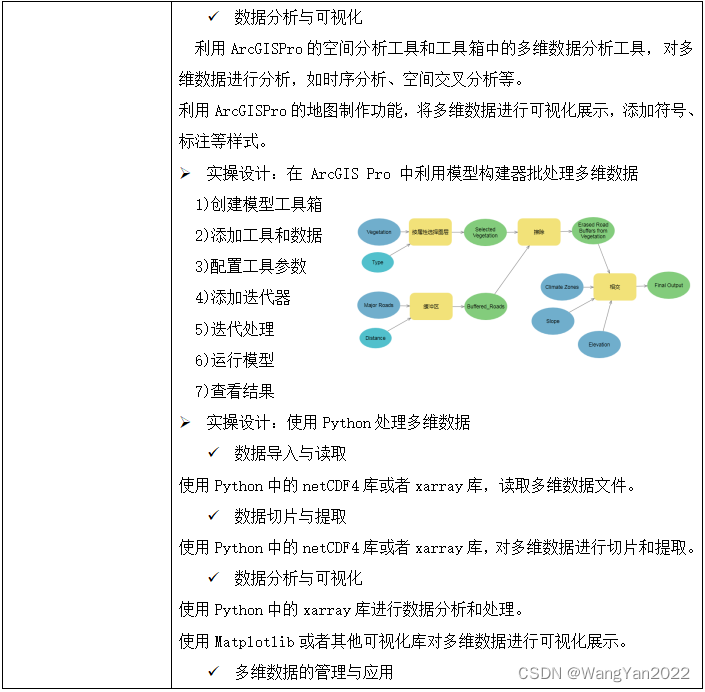
解锁空间数据奥秘:ArcGIS Pro与Python双剑合璧,处理表格数据、矢量数据、栅格数据、点云数据、GPS数据、多维数据以及遥感云平台数据等
ArcGISPro提供了用户友好的图形界面,适合初学者快速上手进行数据处理和分析。它拥有丰富的工具和功能,支持各种数据格式的处理和分析,适用于各种规模的数据处理任务。ArcGISPro在地理信息系统(GIS)领域拥有广泛的应用,被广泛用于政府、企业和科研机构中。Python结合ArcPy库,可以编写脚本实现数据处理自动化,极大地提高了处理效率和可扩展性。Python拥有丰富的库和工具,支持数据科学

无名创新开源飞控利用GPS数据航向对准开源代码
无名创新开源飞控利用GPS数据航向对准开源代码: #define acc_sync_cnt 5 void GPS_Azimuth_Update_Method1(uint8_t flag) { if(flag==0) return; //下面利用到角公式求解误差方位角,先方位角误差正切值 float x1=0,y1=0,x2=0,y2=0,molecule=0,denomi
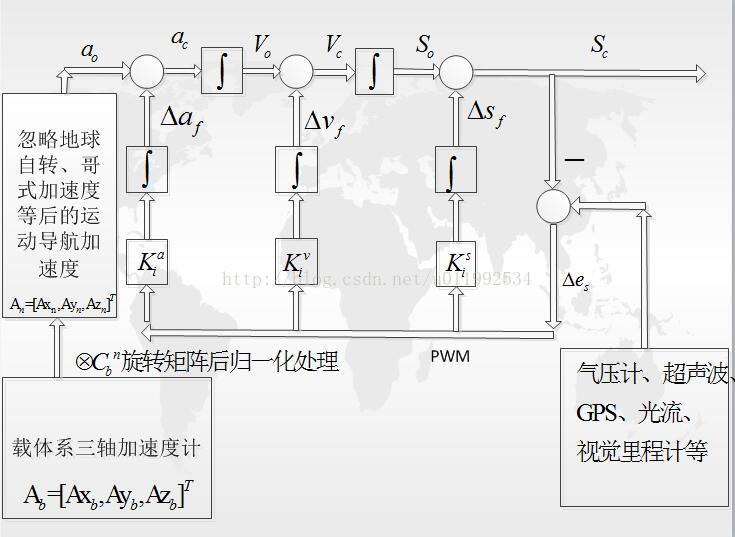
从APM源码分析GPS、气压计惯导融合
最近事多,忙着开源自研飞控,现主要工作基本已经完成,代码最迟下月中旬开放,博客来不及更新,还请各位见谅,后面会抽空多更的咯!!! 自研飞控靓照如下:主控STM32F103RCT6,IMU组合:MPU6050、IST8310(DJI同款磁力计、5883已停产)SPL06_001(歌尔最新高精度气压计),GPS:M8N输出PVT 为方便大家学习,飞控工程支持Keil 、IAR两款编译器
【卫星授时】北斗授时设备,GPS授时器,区别及优缺点
【卫星授时】北斗授时设备,GPS授时器,区别及优缺点 【卫星授时】北斗授时设备,GPS授时器,区别及优缺点 卫星导航定位系统可提供高精度、全天候的导航、定位和授时服务,授时性能优异;高精度、低成本、安全可靠;全天候、覆盖范围广。 北斗及GPS对时装置所产生的标准时间信息已经成为通信、电力、广播电视、科研、安防监控、工业控制等领域的基础保障平台之一。 北斗及GPS对时装置也是基于最新型卫星高精度
【Kafka专栏 14】Kafka如何维护消费状态跟踪:数据流界的“GPS”
作者名称:夏之以寒 作者简介:专注于Java和大数据领域,致力于探索技术的边界,分享前沿的实践和洞见 文章专栏:夏之以寒-kafka专栏 专栏介绍:本专栏旨在以浅显易懂的方式介绍Kafka的基本概念、核心组件和使用场景,一步步构建起消息队列和流处理的知识体系,无论是对分布式系统感兴趣,还是准备在大数据领域迈出第一步,本专栏都提供所需的一切资源、指导,以及相关面试题,立刻免费订阅,开启Kafka学
【数据融合】基于卡尔曼滤波实现GPS-IMU数据融合附matlab代码
下面是一个简单的示例代码,用于基于卡尔曼滤波实现GPS-IMU数据融合的MATLAB实现: matlab % 初始化卡尔曼滤波器参数 dt = 0.1; % 时间步长 A = [1 dt; 0 1]; % 状态转移矩阵 B = [0.5*dt^2; dt]; % 输入控制矩阵 H = [1 0]; % 观测矩阵 Q = eye(2); % 状态噪声协方差矩阵 R_gps = 0.1; % GP
【通信协议-RTCM】GPS-RTK可观测消息 ---- 对应RTCM十六进制 编码ID(3E9 3EA 3EB 3EC)
1. 消息头的内容,类型1001、1002、1003、1004:GPS RTK消息 DATA FIELDDF NUMBERDATA TYPENO. OF BITS Message Number(e.g.,“1001”= 0011 1110 1001) - 消息编号 DF002 uint12 12 Reference Station ID - 参考值ID DF003 uint12 1

京准电钟 | 对比GPS,北斗卫星授时的场景有哪些?
京准电钟 | 对比GPS,北斗卫星授时的场景有哪些? 京准电钟 | 对比GPS,北斗卫星授时的场景有哪些? 对比国外的GPS,我国北斗卫星授时由于其高精度和稳定性,在各个领域都有广泛的应用场景。 以下是一些单北斗卫星授时的应用场景: 交通导航: 单北斗卫星授时在汽车、船舶、飞机等交通工具中的导航系统中发挥着重要作用。高精度的时钟能够提供准确的位置信息,帮助驾驶员或飞行员精确导航,提高交通运输的
京准电钟|基于纳秒级的GPS北斗卫星授时服务器
京准电钟|基于纳秒级的GPS北斗卫星授时服务器 京准电钟|基于纳秒级的GPS北斗卫星授时服务器 你有没有思考过这样一个问题:火车站内,熙熙攘攘,旅客排队进站、列车停靠发车,一切井然有序。一旦有个别时间出现错误,便会造成运行混乱——这些时钟如何能做到精准统一、不差分毫? 答案便是车站里的“时间管理大师”——时间同步系统。这是一种能接收外部卫星时间基准信号,并按照要求的时间精度向外输出时间同步信号

使用spark基于出租车GPS数据实现车辆数量统计以及北京每个城区的车辆位置点数分析
使用spark基于出租车GPS数据实现车辆数量统计以及北京每个城区的车辆位置点数分析 本文将介绍如何使用pyspark以及scala实现的spark分析出租车GPS数据,具体来说,我们将计算每个北京城区内的车辆位置点数,以及统计出租车的数量。我们将使用两个数据集:district.txt 包含北京各城区的中心坐标和半径,taxi_gps.txt 包含出租车的GPS位置数据。以下是数据文件的示例内
电调, GPS与飞塔
电调油门行程校准: 断电-----油门推到最高-------电调上电-------滴滴------油门推到最低---滴滴滴---校准完成。 http://【【教程】油门行程校准(航模,电机,电调)】https://www.bilibili.com/video/BV1yJ411J7aX?vd_source=3cc3c07b09206097d0d8b0aefdf07958 【好盈电调校准】htt
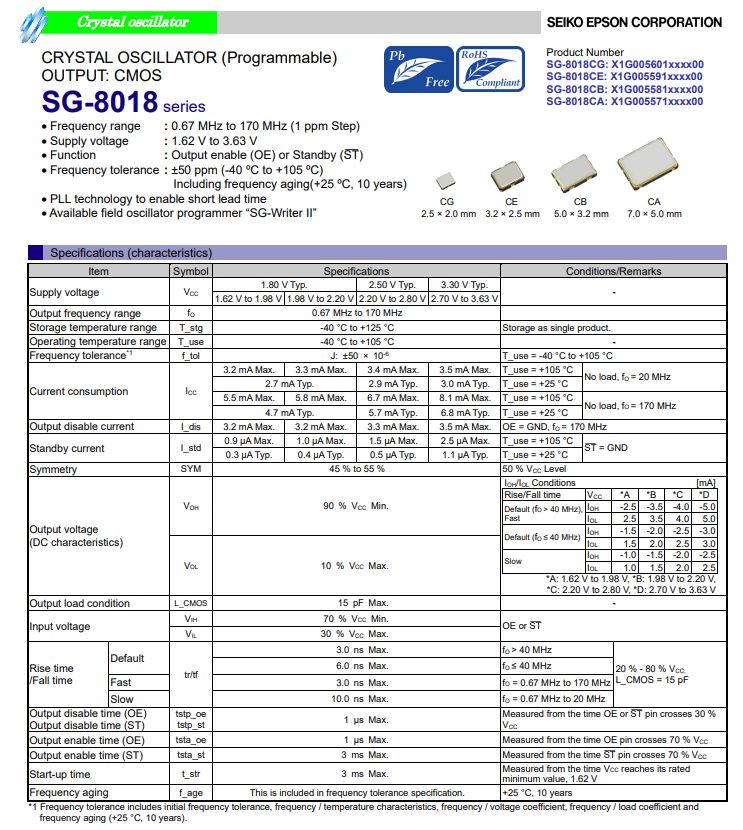
GPS定位器专用可编程晶振SG-8018CB
随着全球定位系统(GPS)技术的普及,GPS定位器在各种领域中得到了广泛应用,如车辆跟踪、个人定位、资产管理和户外活动等。为了确保GPS定位器的高精度和可靠性,选择合适的时钟源至关重要。SG-8018CB可编程晶振作为一款高性能的时钟源,因其优异的特性成为GPS定位器的理想选择。 SG-8018CB晶振采用先进的频率控制技术,能够提供极高的

【附源码+代码注释】误差状态卡尔曼滤波(error-state Kalman Filter),扩展卡尔曼滤波,实现GPS+IMU融合,EKF ESKF GPS+IMU
2023年9月4日更新:重构代码,修复代码BUG,修复公式错误,统一坐标系。 2021年6月23日更新:发现了一个讲卡尔曼滤波特别好的视频,但是需要科学上网。卡尔曼滤波视频 最近在学习卡尔曼滤波器,今天抽出点儿时间总结一下! 我的所有源码都放在Github的仓库里面了:https://github.com/zm0612/eskf-gps-imu-fusion(记得要给我点star呀,哈哈

压控晶振VG5032EDN适用于GPS全球定位系统
爱普生晶振VG5032EDN是一款压控晶振,支持LV-PECL输出差分晶体振荡器,小体积晶振尺寸5.0x3.2mm有源晶振,脚贴片晶振,电源电压3.3V,宽频率范围85MHZ至170MHz,工作温度范围-40℃至+85℃(+105℃C),具有超小型,轻薄型,低电源电压,低抖动,低功耗,低损耗,低耗能,低电平,低相位声等特点,已是通信机、移动电话、寻呼机、全球定位系统(GP
小马哥---安卓手机 关于加速手机的GPS定位速度 实现秒定位方法浅析
安卓系统的A-GPS参数保存在/system/etc/gps.conf中,一般国行的手机给的默认参数还算比较适合国内网络,那些所谓的港行、美水之类的,又或者是国行刷了国外ROM的,这个参数就不太好用了。那些国外ROM和机型,在国内使用的话,A-GPS定位往往需要比较长的时间。综合了网上常见的解决方案,加上自己的一点优化,现在可以说优化的比较完美了。 先来看看这个文件内容,大体上是这样的:
GPS定位的基本原理
1. GPS定位原理简述 在GPS定位系统中GPS卫星发送定位信号,定位设备接收定位信号,通过无线电TOF测距原理(1) - 你眼中的TOF与真实的TOF-CSDN博客已知在这种模下定位设备没有办法直接获取到GPS卫星到定位设备的TOF,当然设备到卫星的距离也是不能直接获取到的,不能获取到定位设备的到卫星距离那由如何进行定位?虽然不能直接获取到TOF距离,但通可以通过多颗基站的距