本文主要是介绍电调, GPS与飞塔,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
电调油门行程校准:
断电-----油门推到最高-------电调上电-------滴滴------油门推到最低---滴滴滴---校准完成。
http://【【教程】油门行程校准(航模,电机,电调)】https://www.bilibili.com/video/BV1yJ411J7aX?vd_source=3cc3c07b09206097d0d8b0aefdf07958
【好盈电调校准】https://www.bilibili.com/video/BV1pV41177BY?vd_source=3cc3c07b09206097d0d8b0aefdf07958
电调上面如果有BEC功能的话可以引出5V给接收机供电:
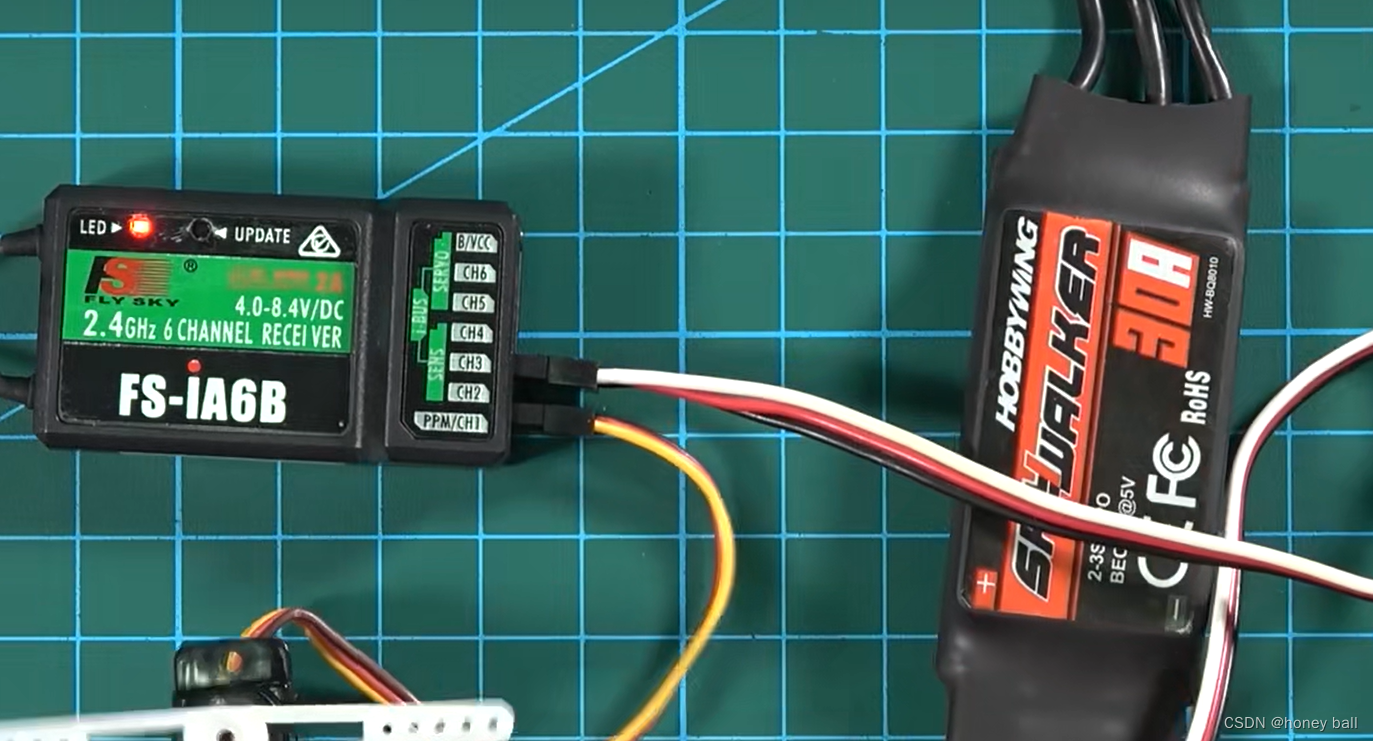
///
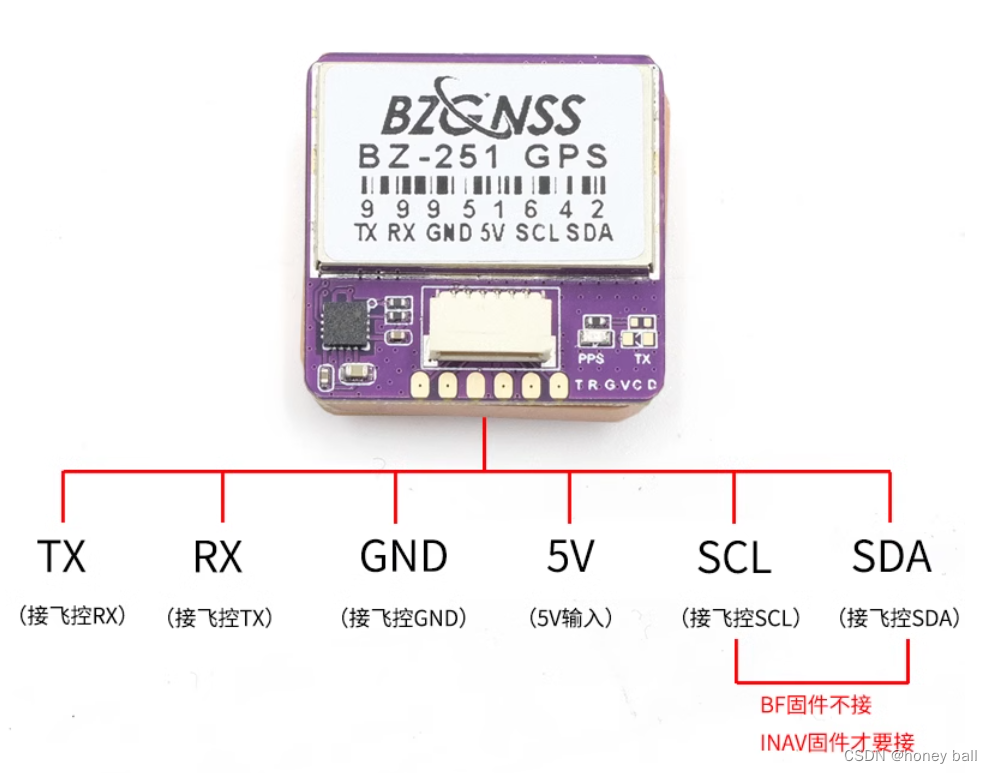
北征BZ-121 181 251GPS :
B6FPV站内GPS设置,安装教程,分为3部分,没基础的请仔细看完
第一部分:接线安装GPS
第二部分:设置端口,配置文件
第三部分:设置GPS救援模式,返航设置
第一部分:接线安装GPS
https://www.ixigua.com/7257016856027955764?logTag=db58eaadc499e432cef7
第二部分:设置端口,配置文件
https://www.ixigua.com/7257479711428313636?logTag=5a60b937c98d22be8dae
第三部分:设置GPS救援模式,返航设置
https://www.ixigua.com/7258181216363512354?logTag=d4dec3eac9a10dcc02d8
SpeedyBee飞塔F405 V3 50A :
BetaFlight ,INAV固件什么意思,除此之外还有什么固件?
BetaFlight和INAV固件都是针对无人机飞行控制器(飞控)的开源固件。这些固件为无人机提供了飞行控制、传感器数据融合、通信接口等功能,并允许用户通过地面站软件对无人机进行配置和调试。
1. **BetaFlight固件**:
- BetaFlight是一个高性能的开源飞行控制器固件,专为多旋翼无人机设计。它提供了精确的飞行控制和易于使用的配置工具,支持多种传感器和硬件平台。BetaFlight以其卓越的飞行性能和用户友好的界面而闻名。
2. **INAV固件**:
- INAV(Inertial Navigation with ArduPilot)是另一个开源飞行控制器固件,它结合了ArduPilot和BetaFlight的优点,提供了灵活的飞行控制和导航功能。INAV支持多种飞行模式,包括GPS导航、自动飞行、手动飞行等,并允许用户通过地面站软件进行复杂的配置和调参。
除了BetaFlight和INAV之外,还有一些其他的开源飞行控制器固件可供选择,包括但不限于:
* **ArduPilot固件**:
- ArduPilot是一个功能强大的开源自动驾驶系统,适用于固定翼、多旋翼、直升机、无人车等多种平台。它提供了丰富的飞行控制和导航功能,并支持多种传感器和硬件接口。ArduPilot以其稳定性和可靠性而受到广泛认可。
这些固件分别对应什么地面站软件?
这些固件通常都有对应的地面站软件,用于配置、监控和调试无人机飞行控制器。以下是BetaFlight、INAV和ArduPilot等固件对应的地面站软件的简要介绍:
- BetaFlight固件:
- Betaflight Configurator:这是BetaFlight固件最常用的地面站软件,用于连接并配置BetaFlight飞控的飞行参数。它支持Windows、Mac OS X和Linux等多种操作系统,并提供了直观的图形用户界面,方便用户进行参数设置和调试。
- INAV固件:
- INAV Configurator:虽然INAV固件在某些方面与BetaFlight相似,但通常也使用Betaflight Configurator作为其地面站软件,因为两者在参数设置和配置上有很高的相似性。
- 注意:INAV固件由于其与ArduPilot的紧密联系,也可能与ArduPilot的地面站软件兼容,如QGroundControl或Mission Planner,但具体兼容性需参考INAV的官方文档或社区信息。
- ArduPilot固件:
- QGroundControl (QGC):这是一个功能强大的地面站软件,支持ArduPilot固件以及多种其他自动驾驶系统。QGC提供了丰富的功能,包括飞行计划制定、实时飞行监控、参数配置等。它支持Windows、Mac OS X、Linux、Android和iOS等多种操作系统。
- Mission Planner:这是另一个流行的ArduPilot地面站软件,提供了类似的功能集。Mission Planner主要面向Windows操作系统,并以其强大的飞行计划和任务管理能力而闻名。
///
这篇关于电调, GPS与飞塔的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








