电调专题

电调升级步骤(飞控端)
1:把.out文件转换成sciprog格式的文件,由于在bootloader里面,用户接受电调程序的缓冲区buffer(L0 SARAM)长度只有0x1000,当用户程序块大于此长度时,要将程序分段,所以这里用perl写了个out2sciprog.exe程序,该程序首先会把.out转换成.hex文件,再将.hex按如下格式分段: {addr1}{length1}{block1} {addr2}{


基于AT32F421的开源电调项目测试
基于AT32F421的开源电调项目测试 📍开源固件地址:https://github.com/lax-fly/lax-esc🧨开源硬件地址:https://oshwhub.com/lax-fly/lax-esc-dev📺演示视频:https://www.bilibili.com/video/BV1di421d7yH/?vd_source=43d9ea2f55b405b989b877
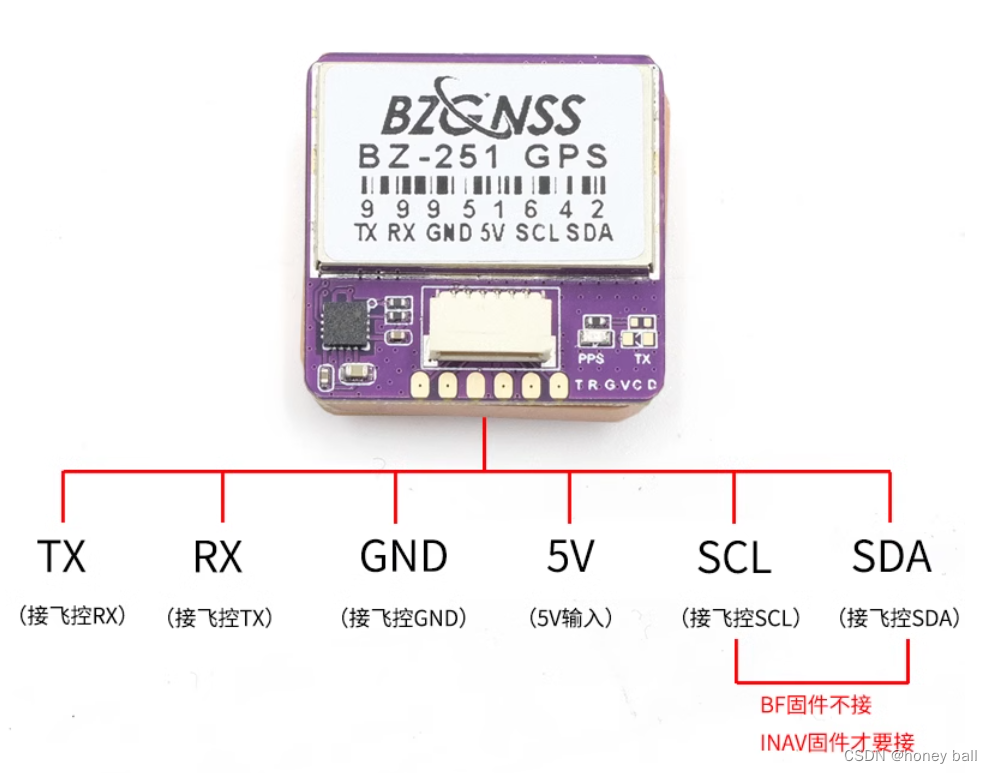
电调, GPS与飞塔
电调油门行程校准: 断电-----油门推到最高-------电调上电-------滴滴------油门推到最低---滴滴滴---校准完成。 http://【【教程】油门行程校准(航模,电机,电调)】https://www.bilibili.com/video/BV1yJ411J7aX?vd_source=3cc3c07b09206097d0d8b0aefdf07958 【好盈电调校准】htt
遥控器与电调相关知识点整理
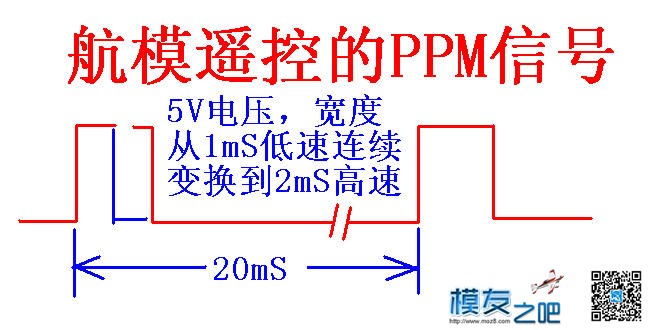
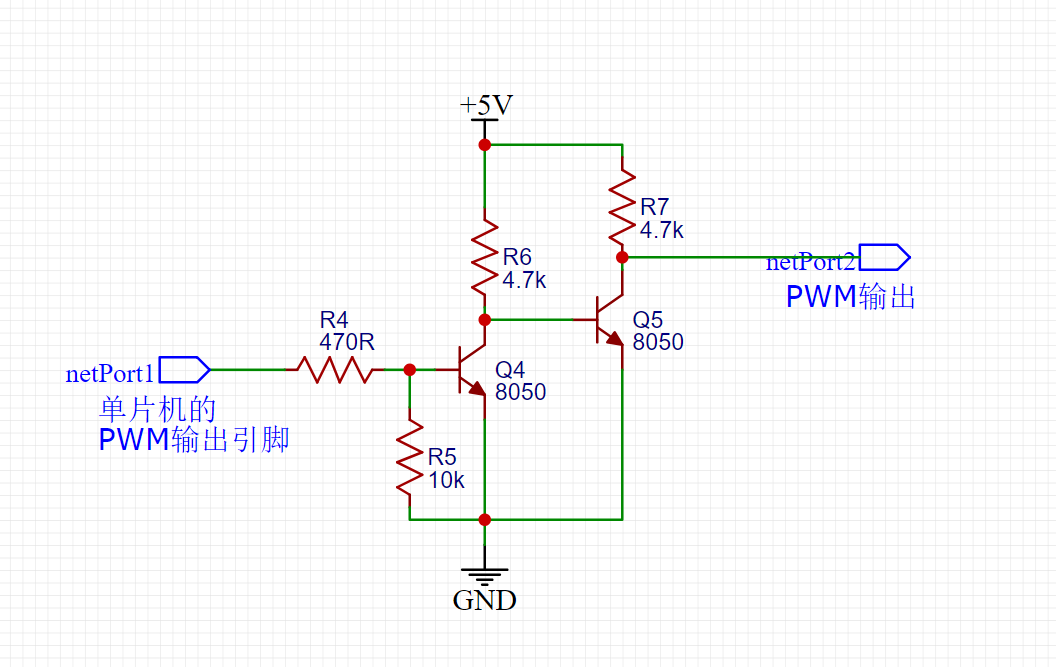
一,电调的控制方法——PWM 单片机输出1ms~2ms的方波脉冲,根据航模标准,PWM信号线的频率应该是50Hz,对应的每个周期总时长是20ms,输出到电调的油门线(控制线,也就是细细的,除了红的是接5V电源,黑的GND,另外那个就是数据线)。 如果是单向电调,1ms表示0%的油门,2ms表示100%的油门。如果是双向电调(有正、反转和刹车),标准1.5ms是0点,1ms是反向油门最大(100%
基于Arduino nano配置银燕电调
1 目的 配置电调,设置电机转动方向,使得CW电机朝顺时针方向转动,CCW电机朝逆时针转动。 2 步骤 硬件 Arduino nano板子及USB线变阻器银燕电调EMAX Bullet 20A朗宇电机 2205 2300KV格氏电池3S杜邦线若干接线端子 软件 BLHeliSuite 注意:根据电调型号下载BLHeliSuite16xxx或BLHeliSuite32xxx 我的银燕
【飞控调试】无人机电调哔-哔-哔-哔-哔...发出急促的响声
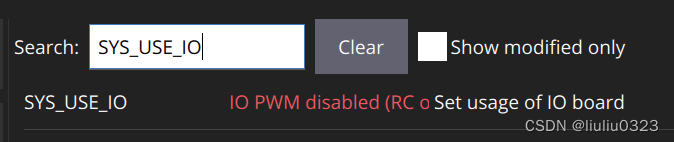
硬件 飞控:Pixhawk 6C mini 电调:好盈hobbywing Platinum 40A 固件:PX4 V1.13.3 问题 电调上电后,电机发出哔-哔-哔-哔-哔…发出急促的响声,进行电调校准也没用。 解决 在QGC里把SYS_USE_IO参数改成Disabled,然后重新上电,重新校准,即可。
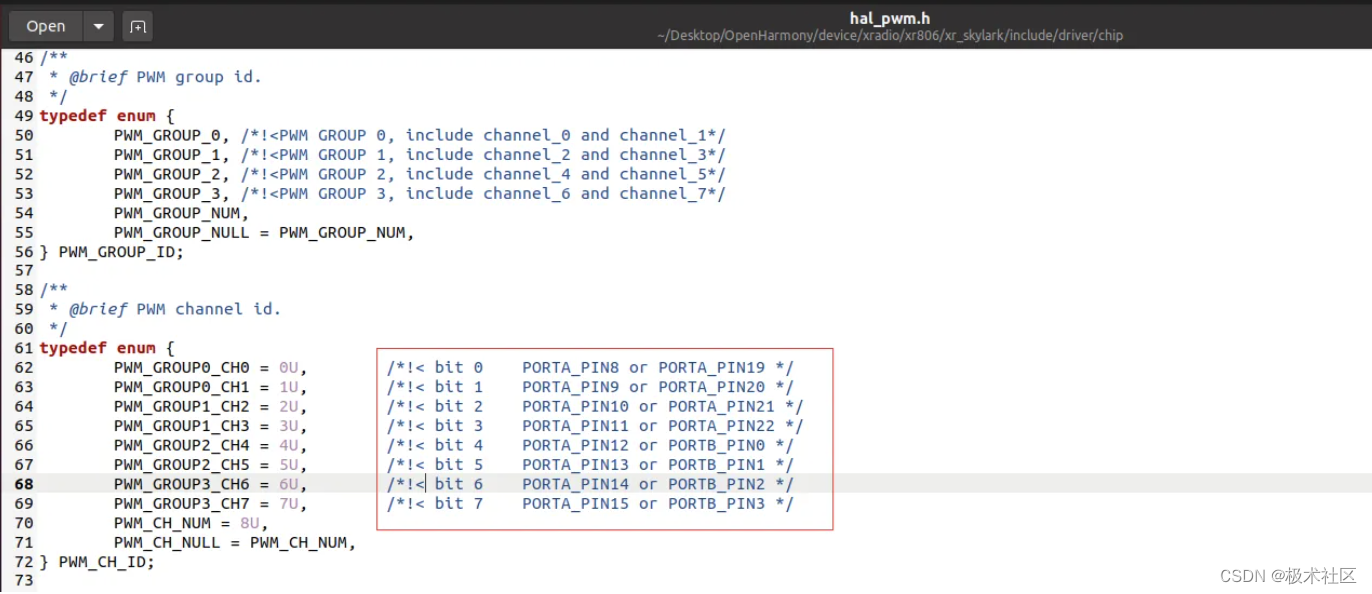
【X806开发板试用】PWM呼吸灯、无刷电调、按键测试样例
环境配置 通过我上篇文章:【XR806开发板试用】Ubuntu环境配置,将配置摸清楚后,就可以开始愉快的编写代码了😄 视频演示 https://www.bilibili.com/video/BV1NF411B74o/?aid=295027788&cid=467687216&page=1 https://www.bilibili.com/video/BV1yR4y1W7aa/?aid=33

无人机技术,无人机动力系统知识,电机、电调、桨叶技术详解
无人机动力系统中的电机、电调和桨叶技术都是非常重要的部分,以下是对这些技术的详解: 无人机电机 在无人机动力系统中,电机是将电能转化为机械能的关键部件。其主要作用是产生旋转力矩,驱动螺旋桨的旋转,从而实现无人机的飞行。无刷电机是无人机中常用的一种电机,它具有效率高、维护成本低、寿命长等优点。 无刷电机 常见模型用有刷、无感无刷、有感无刷电机对比。 1、没有碳刷,理论上

无刷电机学习-方波电调 程序篇1(AM32)
一、AM32简介 AM32 固件专为 ARM 处理器设计,用于控制无刷电机 (BLDC)。该固件旨在安全、快速、平滑、快速启动和线性油门。它适用于多种车辆类型和飞行控制器。 AM32具有以下特点: 可通过 betaflight 直通、单线串行或 arduino 升级固件伺服 PWM、Dshot(300, 600) 电机协议支持双向控制KISS 标准 ESC 遥测可变 PWM
无刷电机学习-方波电调 电路篇
想要彻底的理解无刷电机的驱动,那必然少不了学习他的驱动电路和程序。这里用开源的AM32无刷电调(方波驱动)来作为学习无刷电机笔记。 https://github.com/AlkaMotors附上作者github地址 AM32_Hardware: 基于AT32MCU的AM32PCB另一位大佬开源的电路图本次学习就仿照该电路 一个基本的无刷电机驱动电路大致包含电源

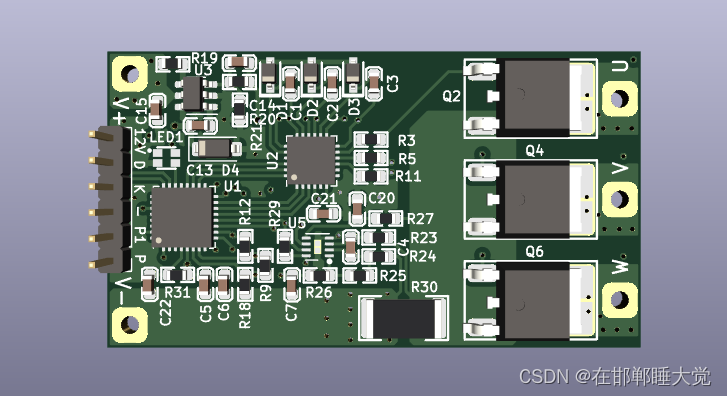
基于开源固件BLHeli_S和FD6288驱动的无刷电调研究
概述 该版本主控MCU为EFM8BB21,引脚定义基于开源电调固件BLHeli_S_J_H,半桥驱动芯片选用QFN20封装的FD6288,桥路NMOS管为STL160N3(160A 30V),供电网络为3S-4S电池-78L08转8V-SPX3819转3.3V,并且在各个输入输出位置均配以测试点,方便测试查验波形,最终定版如下图所示 固件烧录使用淘宝购买的C2下载器,操作步骤自行CSDN搜索

自组装四旋翼+电调校准+缺相
文章目录 摘要【自组装四旋翼】一、准备材料二、组装三、焊接沉金板四、查看机架水平五、焊接香蕉头六、装减震板 【测试电调和电机】一、瞎捉摸二、发现问题三、解决问题 注意事项总结【我的APM飞控电调行程校准】安全检查第一步:第二步:第三步:第四步:最后一步: 思考 摘要 硬件环境:飞控软件环境:无要求第一次自组装四旋翼,装完发现缺相(有一个电机一会左一会右的旋转),然后进行 了电调
【STM32驱动无刷电调遇到的问题及其解决办法】
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 STM32驱动无刷电机遇到的问题 前言一、PWM驱动代码软件仿真部分使用Keil自带仿真示波器画面 总结 前言 提示:这里可以添加本文要记录的大概内容: 使用STM32开发板进行无刷电调的驱动开发,发现舵机测试仪可以轻松驱动无刷电机旋转和调速,而自己拟写的PWM程序则无法驱动。后面上示波器抓波,终于发
【飞控调试】无人机电调哔-哔-哔-哔-哔...发出急促的响声
硬件 飞控:Pixhawk 6C mini 电调:好盈hobbywing Platinum 40A 固件:PX4 V1.13.3 问题 电调上电后,电机发出哔-哔-哔-哔-哔…发出急促的响声,进行电调校准也没用。 解决 在QGC里把SYS_USE_IO参数改成Disabled,然后重新上电,重新校准,即可。

【BLHeli固件】好盈乐天电调刷BLHeli固件调参 arduino
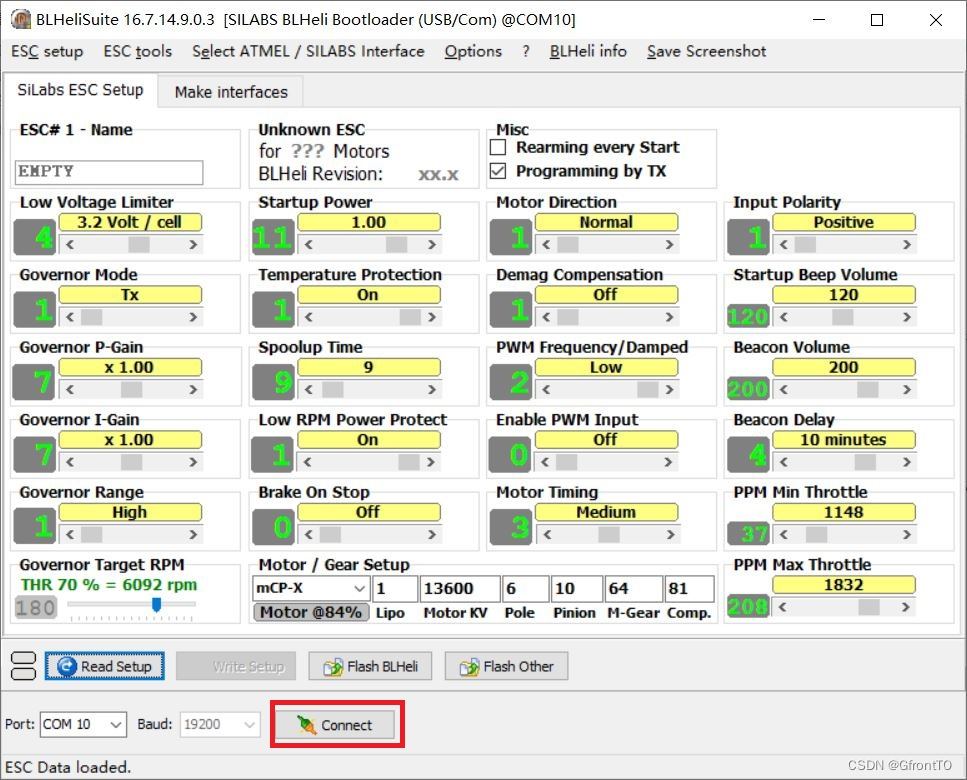
准备材料:要刷的电调,arduino nano开发板,杜邦线,BLHeliSuite软件 第一步:查看自己的电调是否支持刷BLHeli固件 打开BLHeliSuite软件,找到如图所示的文档,在文档里搜索自己电调的英文,比如好盈就是Hobbywing,好盈乐天系列Hobbywing XRotor,其他的你们可以自己百度一下。如果这个文档里没有你的电调,那可能你的电调不支持刷这个固件。 比
[资料分享] 好赢60A无刷电调设置说明书【详细】
完全针对车模而设计的全新程序算法,具有优异的启动效果、加速性能、刹车性能及线性度; 支持所有无感(即无霍尔传感器)无刷电机; 高品质用料,具有强大的耐电流能力; 具备正转带刹车(单向) 、正反转带刹车(双向) 、直接正反转(攀爬车)三种运行模式; 4段最大倒车力度调节; 比例式刹车:4段最大刹车力度调节、8段拖刹力度调节、4段初始刹车力度调节; 9种启动加速度(Punc