本文主要是介绍GPS定位的基本原理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. GPS定位原理简述
在GPS定位系统中GPS卫星发送定位信号,定位设备接收定位信号,通过无线电TOF测距原理(1) - 你眼中的TOF与真实的TOF-CSDN博客已知在这种模下定位设备没有办法直接获取到GPS卫星到定位设备的TOF,当然设备到卫星的距离也是不能直接获取到的,不能获取到定位设备的到卫星距离那由如何进行定位?虽然不能直接获取到TOF距离,但通可以通过多颗基站的距离差然后根据双曲线原理完成定位,由于定位设备并不发送信号而仅仅卫星发送定位信号,这种定位方式下定位设备的数量可以无限多。
2. GPS 定位原理V1.0
假定卫星S0和卫星S1同时发送定位信号(如下图所示),这时设备D收到这两颗卫星信号的时间差为Rt,那么这个时间差Rt是由于什么造成的?由于两个卫星是同时发送的无线信号且信号传输的速度相等,这个时间差Rt是由于d0和d1的距离差导致,当Rt为0时,这时设备应一定位于S0和S1连线的中轴线上;当Rt大于0,这时设备D位于中轴线的左边;当Rt小于0,这时设备D位于中轴线的右边。
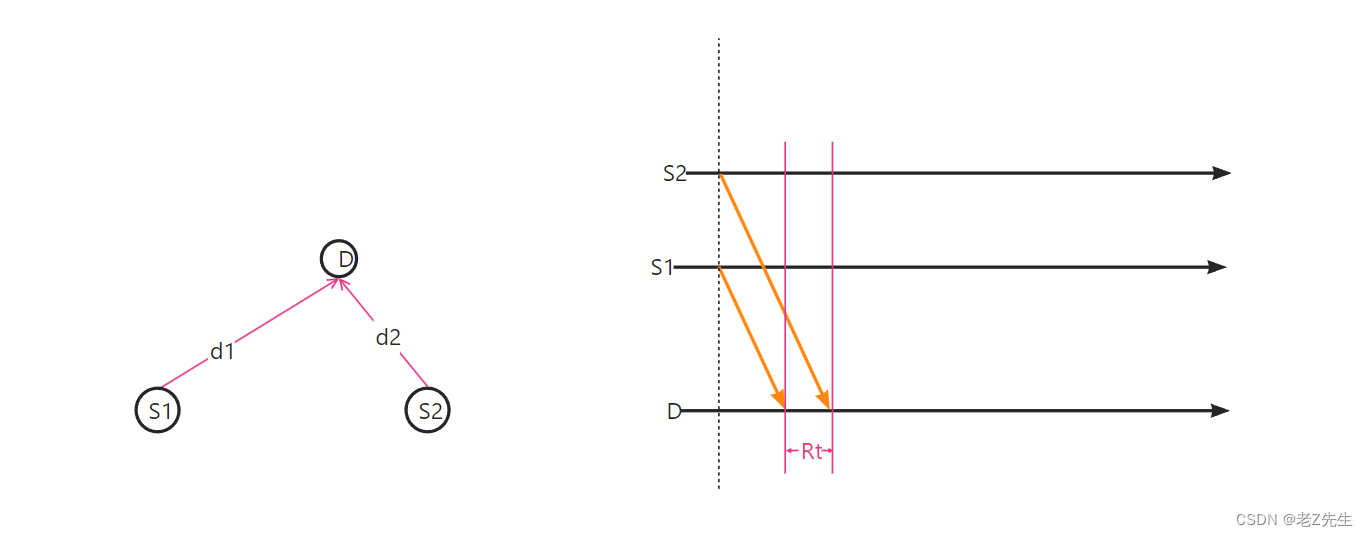
虽然不能直接测量卫星到设备的TOF距离,但有存在两颗卫星可以测量卫星到设备的距离差 :
其中d为设备D到S0与S1的距离差,c无线电传播速度。当测量到Rt后结合光速的计算就可以计算得到设备D到S0与S1的距离差,当已知这组设备到两颗卫星的距离差后,其实是得到已一组双曲线方程:
双曲线图像如下:
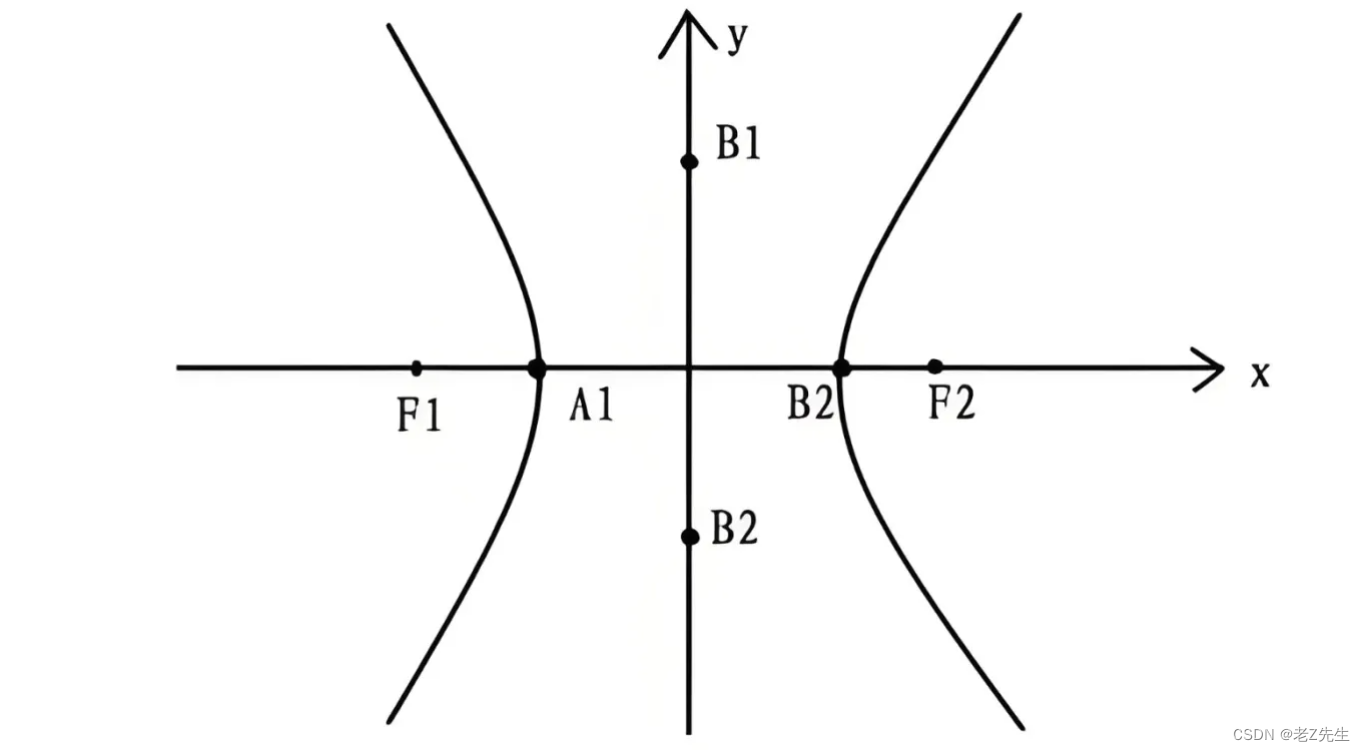
当有这样4颗卫星后,就可以得到3组距离差,可以构建3个方程组,通过解三个方程组可以算出唯一的x,y,z坐标:
以上即是卫星定位的基本原理,也是为什么要需要4颗卫星才能定位的根本原因。
3. GPS 定位原理V2.0
在V1.0要求卫星S0、S1同时发送定位信号,首先需要S0和S1同时发送信号这在工程上几乎是不可能的,其次即使做到了同时发送信号由于无线信号存在相互干扰导致接收端收不到任何的定位信号,在实际上会将S0和S1错峰发送,如下图所示:
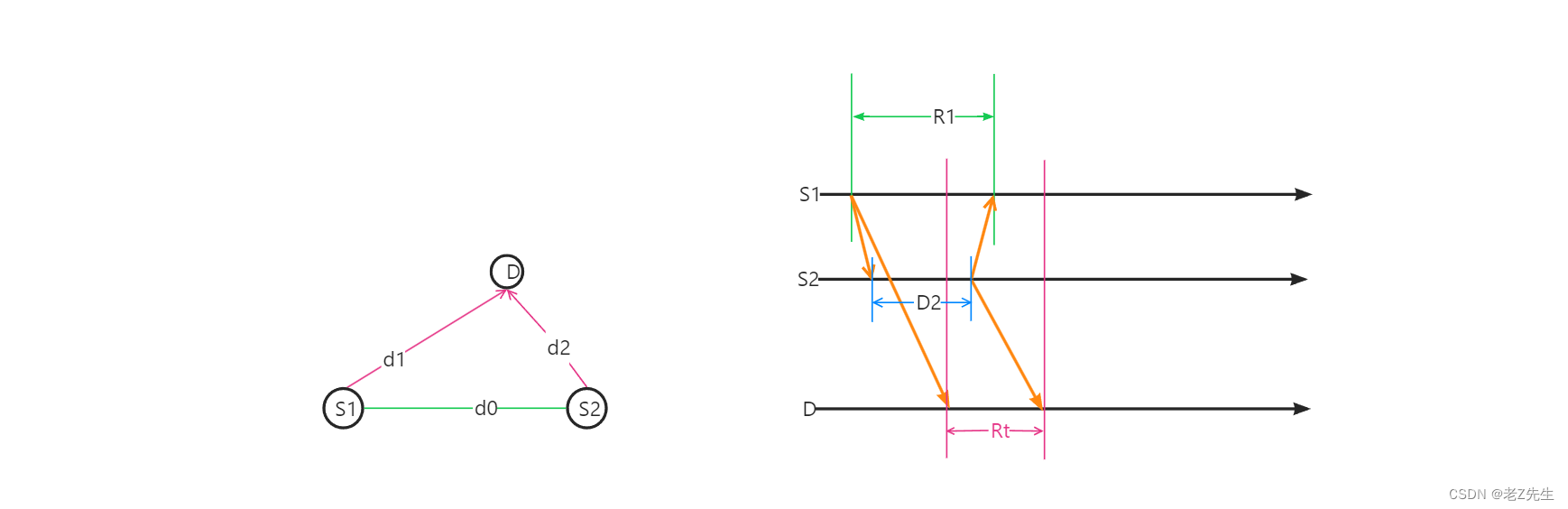
在S0和S1错峰发送后,接收时间差Rt已不再是设备D到卫星S0与S1的距离差了,而是:
在上式中d0为卫星之间的距离,由于卫星间相对位置已知d0为常量,即使不知道也可以通过卫星间完成的TOF测量得到;时间D2等于卫星S2收到S1信号到S2发送信号之间的时间。采用新的距离差计算方案后新的定位公式如下:
同样收到4颗卫星后会得到3组距离差,然后得到为唯一的坐标。
4. GPS 定位原理V3.0
在V2.0中解决了GPS的同时发送导致的干扰问题,但是未能解决设备之间的时钟误差问题,卫星使用的时钟精度极高,但是终端设备受限成本问题导致时钟精度不高,在V3.0中需要解决时钟误差问题。解决方案与无线电TOF测距原理(1) - 你眼中的TOF与真实的TOF-CSDN博客类似。
5. 总结
卫星定位的基本原理是通过接收4颗卫星然后得到3组距离差,通过计算3组双曲线(对于3维是双曲面)相的交点解算得到唯一的坐标。
这篇关于GPS定位的基本原理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





