自由度专题

【机器人学】7-4.六自由度机器人自干涉检测-两圆柱体空间关系【附MATLAB代码】
目录 前言 公式推导 MATLAB代码 前言 前面介绍了两个圆柱的旋转变换,已将两个圆柱体旋转到了比较好分析的位置,下面将正式分析两个圆柱体的位置关系。会借用投影的思想。 一 根据机械臂的几何数据以及DH参数,确定机械臂等效的圆柱体的上下圆心坐标。 二 将一个圆柱体旋转到与坐标Z轴对齐,另一个圆柱体转到,上下圆在XoY

【机器人学导论】6自由度机械臂逆运动学求解—牛顿法(数值法,仅旋转关节)
我以前是机器人专业,不过学的不多,教程应该是灰色封面的《机器人学导论》。3年前学的了,软件仿真学的是ABB,上手操作是KUKA的机器人。本文是给别人解决问题的记录,写个笔记。代码是matlab的,不免费分享,但是看我的解析应该也能自己写出来。我不从事这个行业,很多东西已经模糊了。 文章目录 一、DH参数二、正向运动学三、逆向运动学3.1 逆向运动学的求解方法:3.11 解析法(Ana

基于粒子群优化算法的六自由度机械臂三维空间避障规划
摘要:本研究旨在解决机械臂在复杂环境中避障路径规划的问题。本文提出了一种利用粒子群优化算法(PSO)进行机械臂避障规划的方法,通过建立机械臂的运动模型,将避障问题转化为优化问题。PSO算法通过模拟群体中个体的社会行为和个体行为来寻找到最佳路径,确保机械臂在避开障碍物的同时,能够高效地到达目标位置。研究表明,基于PSO算法的避障规划在收敛速度和路径优化上具有良好的性能,能够有效提高机械臂的操作效率和

【机器人学】7-3.六自由度机器人自干涉检测-圆柱体的旋转变换【附MATLAB代码】
前言 上一章确定了机械臂等效的圆柱体的上下圆心坐标,这篇文章将解决算法三个核心中的第二个核心: 一 根据机械臂的几何数据以及DH参数,确定机械臂等效的圆柱体的上下圆心坐标。 二 将一个圆柱体旋转到与坐标Z轴对齐,另一个圆柱体转到,上下圆在XoY平面的

Robot Operating System——多个自由度的关节状态信息
大纲 应用场景定义字段解释 案例 sensor_msgs::msg::MultiDOFJointState 是 ROS (Robot Operating System) 中的一个消息类型,用于表示具有多个自由度(Degrees of Freedom, DOF)的关节状态。它通常用于传输和处理机器人中复杂关节的状态信息。 应用场景 机器人控制 多自由度机械臂:在多自由度机械臂中
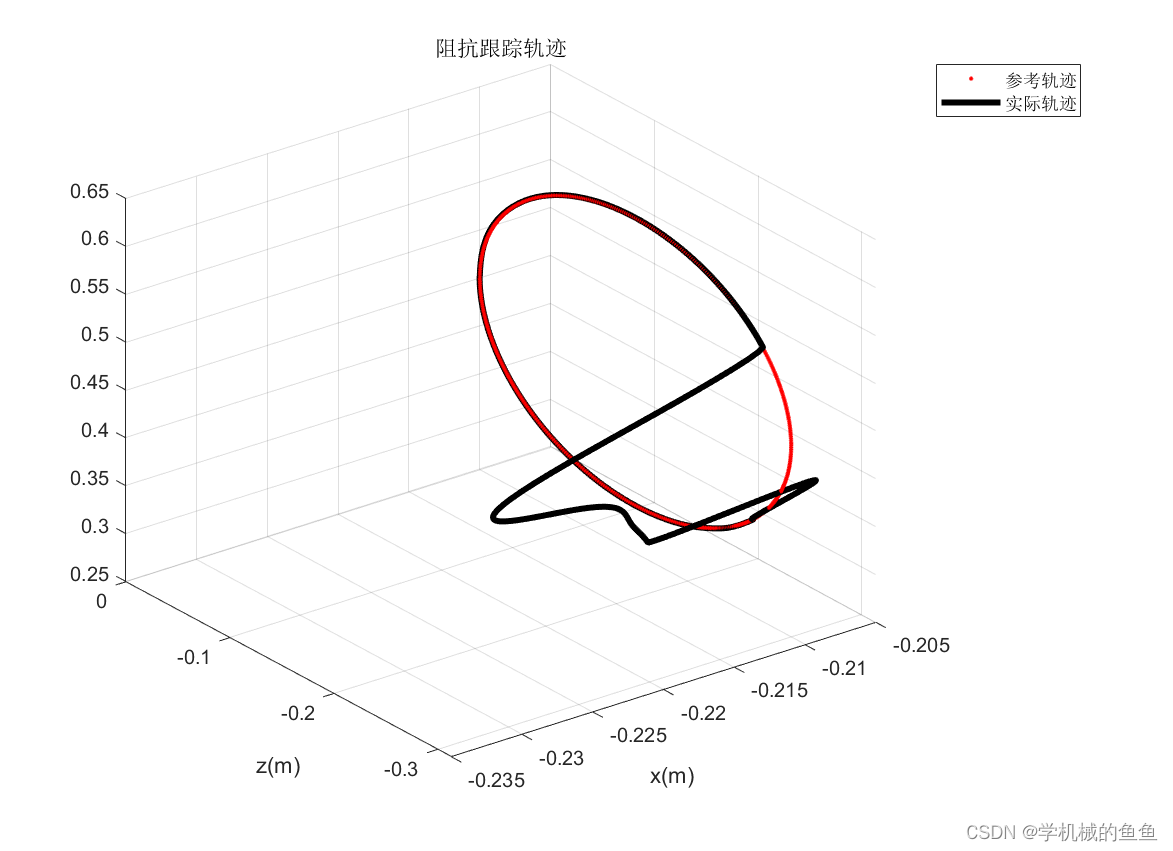
基于动力学的六自由度机器人阻抗恒力跟踪控制
1.整个代码的控制流程图如下: 2.正逆运动学计算 略 3.动力学模型 采用拉格朗日法计算机械臂的动力学模型,其输入的是机械臂的关节角度、角速度和角加速度;其中M、C、G本别是计算的惯性力、科式力和重力项,相关部分如下: 4.RBF神经网络自适应参数调节 采用RBF自适应调节阻抗控制器参数,末端每个方向单独进行参数的调整,其中rbf的输入的是力和位置,输出的是阻抗控制器的参数,rb

DeepSORT(目标跟踪算法)中自由度决定卡方分布的形状
DeepSORT(目标跟踪算法)中自由度决定卡方分布的形状 flyfish 重要的两个点 自由度决定卡方分布的形状(本文) 马氏距离的平方在多维正态分布下服从自由度为 k 的卡方分布 独立的信息 在统计学中,独立的信息是指数据中的独立变量或值的数量。当我们计算样本统计量(如平均值或方差)时,某些数据点的值可以从其他数据点和统计量中推导出来,因此这些点不再提供独立的信息。 卡方分布是一种

Simulink建立4WIS线性二自由度参考模型
4WIS线性二自由度参考模型 基于前轮转向做了小改动,难度不大,相当于两个微分方程加了两项 Simulink向CarSim中输入四个车轮的转角 有一点注意,四轮转向,前后轴车轮转角不应相等,否则动画会很滑稽 同侧车轮转向角的大小应该是相同的,内侧大于外侧,更改CarSim中前后轴距使质心位于中心 实验时更改绕Z轴的转动惯量,1708为算上悬架质量的Iz,1537为簧上

直线的自由度的数目的解释
直线有几个自由度? 4个。有下面一些直观的解释方法 通过两个垂直的平面来定义一条直线。分别在两个垂直平面上找到一个点,连接这两个点,就可以定义一条直线。由于平面上的点的自由度为2,所以直线的自由度为4. 运动定义方法。对于一个3维空间的刚体来说,其位置可以由3个平移和3个旋转来确定,因此刚体的自由度为6。对于直线来说,由于绕其自身方向的旋转和沿着自身方向的平移,不会带来变化。因此直线的自由度
现代城市化生活下,很多人有高薪,但是工作压力大,幸福度和自由度不一定高,从社会发展和哲学的角度来解读一下
在现代城市化生活中,高薪与工作压力、幸福度和自由度的关系,确实是一个值得从社会发展和哲学角度深入探讨的话题。 从社会发展角度看 经济驱动:随着社会的快速发展,经济成为推动社会进步的重要力量。人们为了追求更高的生活质量和更好的物质条件,不得不面对更高的工作压力。高薪往往成为衡量个人价值和职业成功的标准之一,但同时也带来了工作压力的增加。竞争压力:城市化进程中,人口聚集、资源有限,导致竞争日益激烈

HDU 4678 Mine (博弈SG+自由度原理)
Problem Description Have you ever played a game in Windows: Mine? This game is played on a n*m board, just like the Pic(1) On the board, Under some grids there are mines (represent by a red f

工业机器人的自由度是什么?
机器人家上了解到,随着机器人产业的飞速发展,工业机器人已经广泛应用于各行各业,从材料搬运到机器维护,从焊接到切割,从装配到喷涂,我们发现,这些工业机器人形状各异,功能性能各不相同,那么是什么决定了工业机器人的灵活性和活动范围呢,这个问题比较复杂,但是有一个关键因素在很大程度上决定了机器人的灵活性和活动范围,那就是工业机器人的自由度,通常也叫做轴数。 什么是工业机器人的自由度? 通常作为
模型自由度与残差自由度
模型的自由度(degrees of freedom)通常指的是在模型参数估计过程中剩余可以自由变化的数量。 当我们谈论残差平方和(RSS)或误差项的自由度时,确实使用的是n - k - 1的公式,这里: n 是样本大小,即观测值的数量。k 是除了截距项之外的解释变量个数。 自由度n - k - 1的原因在于: 因为模型中有k+1个待估计的参数(包括截距项)。在确定了这k+1个参数后,n个观

一分钟了解机器人自由度
目录 自由度的定义 自由度的分类 自由度的影响 影响自由度的主要参数 关节类型和数量 机械结构 控制系统 自由度控制的硬件架构原理 传感器 执行器 控制器 通信接口 软件和算法 机器人的自由度是指机器人在空间中可以独立移动的方向和角度的数量,它是衡量机器人灵活性和功能性的一个重要指标。自由度的高低直接影响机器人能够执行的任务类型

双轴驱动步进电机云台二自由度单片机控制程序PTU57
高精度云台由两个电机驱动,可控制方位角和高度角,具有两自由度的机械电子设备。可用于机器视觉、摄影摄像、监控安防、天文观测、雷达扫描、DIY雕刻机、转盘转台、智能机械手臂、双轴跟踪太阳能定日镜等各类应用高精度云台的场合。 步进电机是将电脉冲信号转变为角位移或线位移的控制电机,是现代数字程序控制系统中的主要执行元件,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变
【小白学机器学习8】统计里的自由度DF=degree of freedom, 以及关于df=n-k, df=n-k-1, df=n-1 等自由度公式
目录 1 自由度 /degree of freedom / df 1.1 物理学的自由度 1.2 数学里的自由度 1.2.1 数学里的自由度 1.2.2 用线性代数来理解自由度(需要补充) 1.2.3 统计里的自由度 1.3 统计学里自由度的定义 2 不同对象的自由度 2.1 纯公式的自由度:纯公式,没采样无样本时 2.2 抽样分析时:纯样本的自由度 2.3 公式里某个特定变
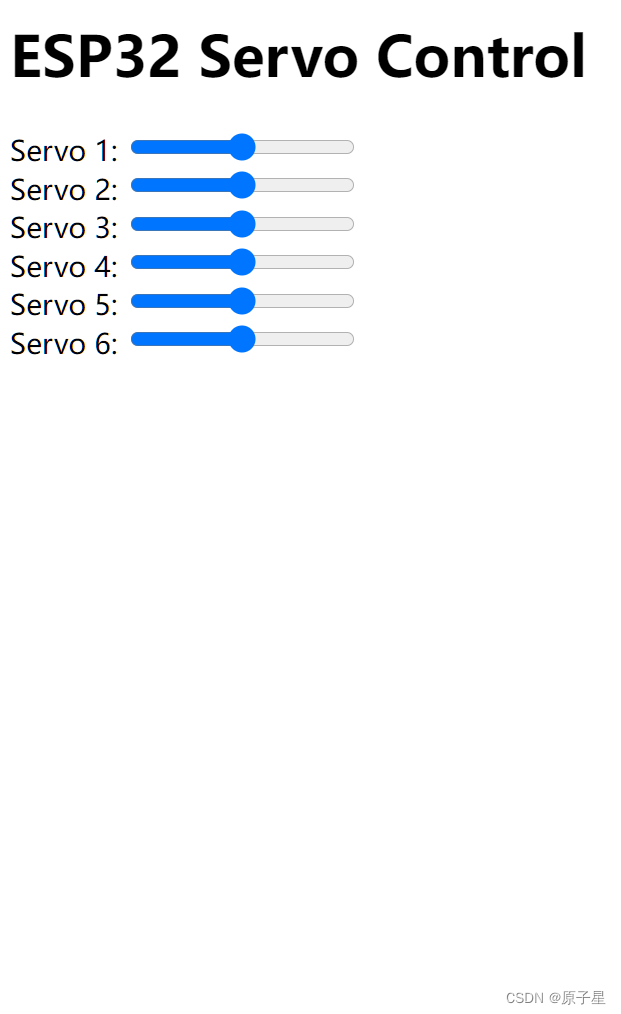
用ESP32和MicroPython实现6自由度遥控舵机机械臂
文章目录 说明MicroPython代码:main.py服务端的页面文件 index.htm使用 说明 ESP32提供了多路IO接口和WiFi联网能力,很多开发板也支持MicroPython,可以方便的实现一个简单的舵机机械臂控制,废话不多说,直接上代码吧: MicroPython代码:main.py 使用到了microdot库,用于控制页面文件的加载和返回 from m
六自由度Stewart平台的matlab模拟与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 4.1运动学原理 4.2 Stewart平台运动学方程 5.完整工程文件 1.课题概述 六自由度Stewart平台的matlab模拟与仿真,模拟六自由度Stewart平台的动态变化情况以及伺服角度。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a

matlab新能源汽车三自由度操纵稳定性分析及优化
1、内容简介 略 可以交流、咨询、答疑 55-新能源汽车三自由度操纵稳定性分析及优化 2、内容说明 略 摘 要 电动化是节能减排、寻求替代能源的最佳途径,已成为行业共识,论文基于江西科技学院桑塔纳轿车油改气项目,在拆除发动机、变速箱等部件而增加电机、电池的情况下,分析改装前后车辆结构参数的变化,研究改装前后车辆的操纵稳定性并得出相关结论。 论文首先建立了二自由度车辆转向
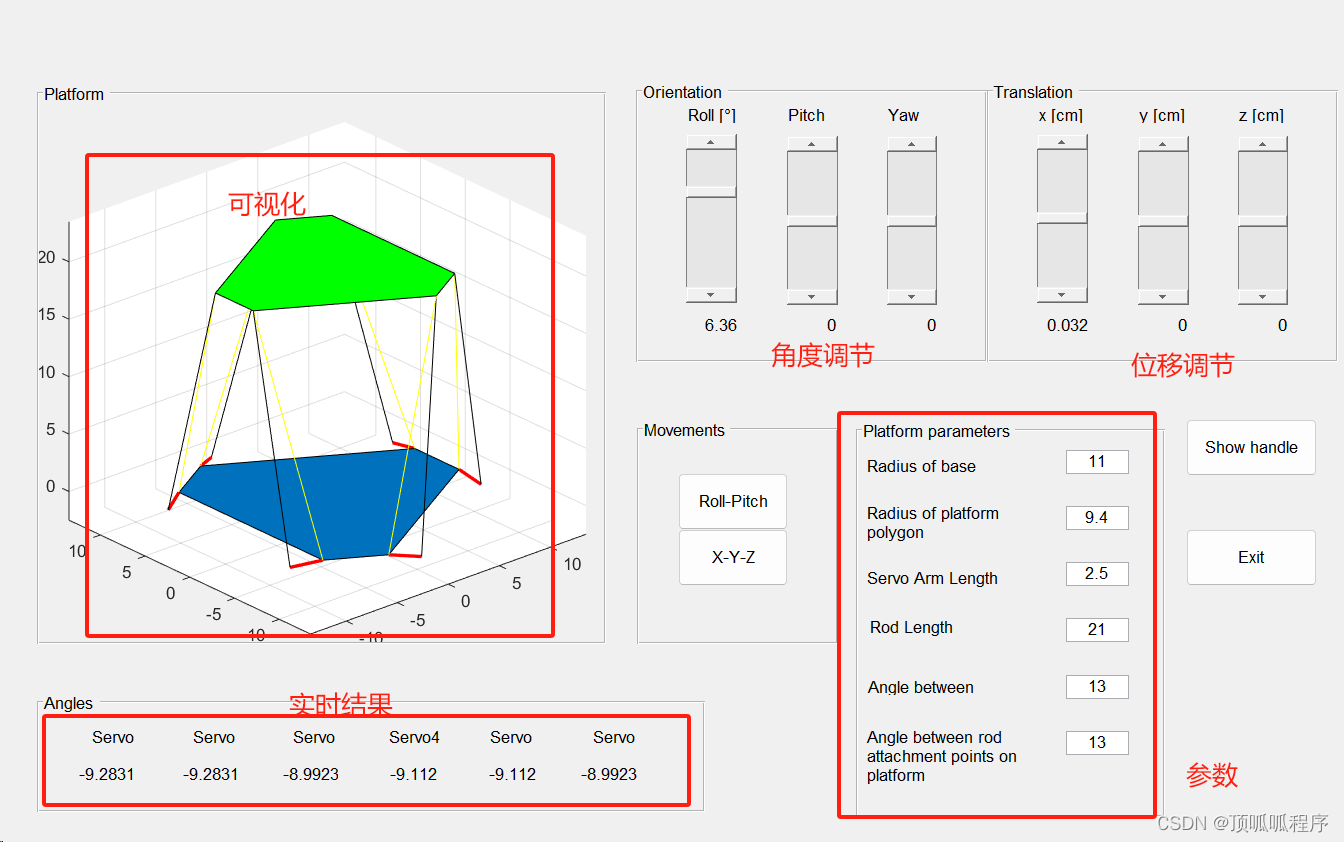
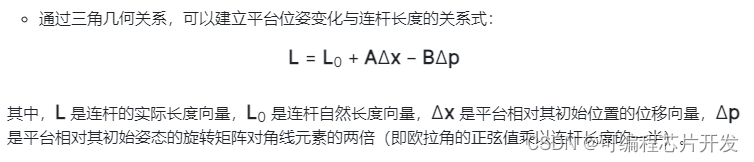
168基于matlab的六自由度并联摇摆台的反解控制算法
基于matlab的六自由度并联摇摆台的反解控制算法,stewart平台,配有GUI界面,可以自定义角度,杆长等参数。设定动平台位姿即能得到电机参数。程序已调通,可直接运行。 168 六自由度并联摇摆台 反解控制算法 (xiaohongshu.com)

m基于万能逼近原理自适应模糊控制算法的多自由度AUV运动控制抗干扰补偿simulink仿真
目录 1.算法仿真效果 2.算法涉及理论知识概要 3.MATLAB核心程序 4.完整算法代码文件 1.算法仿真效果 matlab2022a仿真结果如下: 2.算法涉及理论知识概要 自主水下航行器(Autonomous Underwater Vehicle,AUV)是一种具有自主性、灵活性、隐蔽性等优点的智能化设备,广泛应用于

五自由度机器人机构设计
摘 要 本次毕业设计设计了一个五自由度串联机器人。大致流程如下:首先计算出执行端所需要的驱动力矩,再由此选出该关节所需的伺服电动机和减速器,设计出机壳和关节的连接结构,绘制3D图,做出三维动画,通过软件的测量求出设计好的部分重心,求出下一个关节所需的驱动力矩,选出所需的减速器和伺服电动机,以此类推最终完成总体设计,并且绘制了串联五自由度机器人的工程图。 关键词:五自由度 串联机器人 总体
无偏样本方差和有偏样本方差 这里的n或n-1称之为自由度
两者的区别就是一个除以的是n-1,而另一个除以的是n。这里的n或n-1称之为自由度。自由度通俗的理解就是比如一个数值列表list=[x1,x2,x3],如果我们此时知道list的平均值为2,那么对于x1,x2变量我们可以任取,若x1=1,x2=2,那么要使list均值为2那么x3只能取3,此时x3就不再是自变量。那么在平均值已知的条件下,能自由取值的变量就只有2个而不是3个。所以此时list的自由
五自由度液压机械手及PLC控制系统设计(设计说明书+CAD图纸+开题报告+任务书+PLC控制程序+外文翻译……)
目 录 1 前言 1.1 工业机器人简介----------------------------------------------------------(1) 1.2 世界机器人的发展--------------------------------------------------------(1) 1.3 我国工业机器人的发展--------------------------
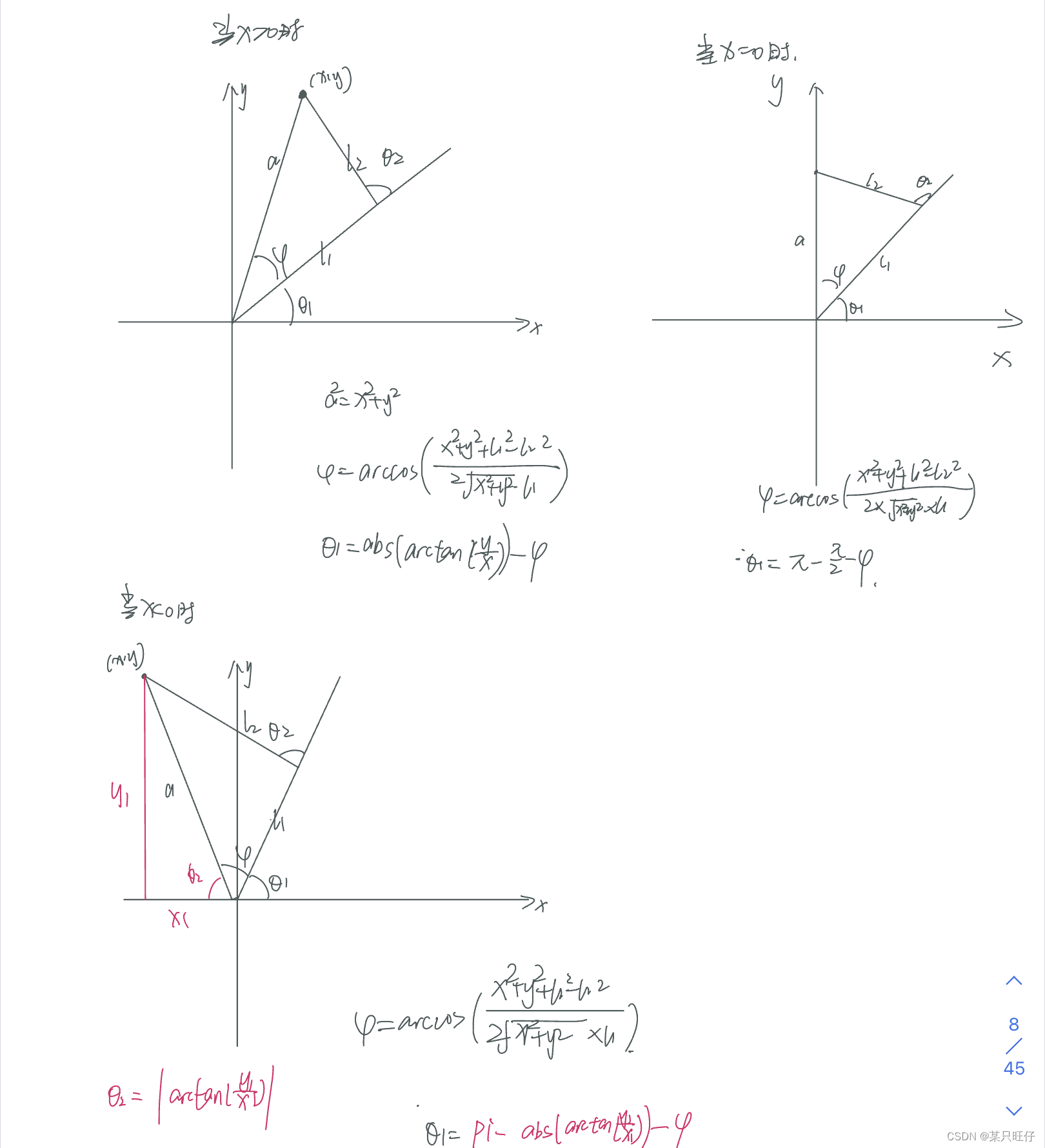
四足机器人学习笔记(八自由度运动学正解)
起初对于灯哥已经开源的代码中正运动学函数ik()的角度求解存在疑问 x1=-x1shank1=pi-acos((x1*x1+y1*y1-l1*l1-l2*l2)/(-2*l1*l2))fai1=acos((l1*l1+x1*x1+y1*y1-l2*l2)/(2*l1*sqrt(x1*x1+y1*y1)))if x1>0:ham1=abs(atan(y1/x1))-fai1eli

日本护照的旅行自由度位居全球榜首
伦敦--(美国商业资讯)--日本本月获准免签证进入缅甸,在2018 亨氏护照指数(Henley Passport Index)中超过新加坡,位列榜首。日本现在享受到190个目的地的免签证/入境签证,而新加坡的总数为189个目的地。两国自2月攀升至第一位以来,一直并驾齐驱,自2014年以来首次将德国挤至第二位。 现在,德国又跌至第三位,与韩国和法国并列。这三个国家的公民可免签证进入188个国