本文主要是介绍基于动力学的六自由度机器人阻抗恒力跟踪控制,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.整个代码的控制流程图如下:

2.正逆运动学计算
略
3.动力学模型
采用拉格朗日法计算机械臂的动力学模型,其输入的是机械臂的关节角度、角速度和角加速度;其中M、C、G本别是计算的惯性力、科式力和重力项,相关部分如下:
4.RBF神经网络自适应参数调节
采用RBF自适应调节阻抗控制器参数,末端每个方向单独进行参数的调整,其中rbf的输入的是力和位置,输出的是阻抗控制器的参数,rbf原理如下:

RBF的具体实现如下:

5.阻抗控制器的实现
主要是雅可比还有动力学模型的计算,以及干扰力矩的估计,具体的控制模型如下:

其中干扰力的估计如下:
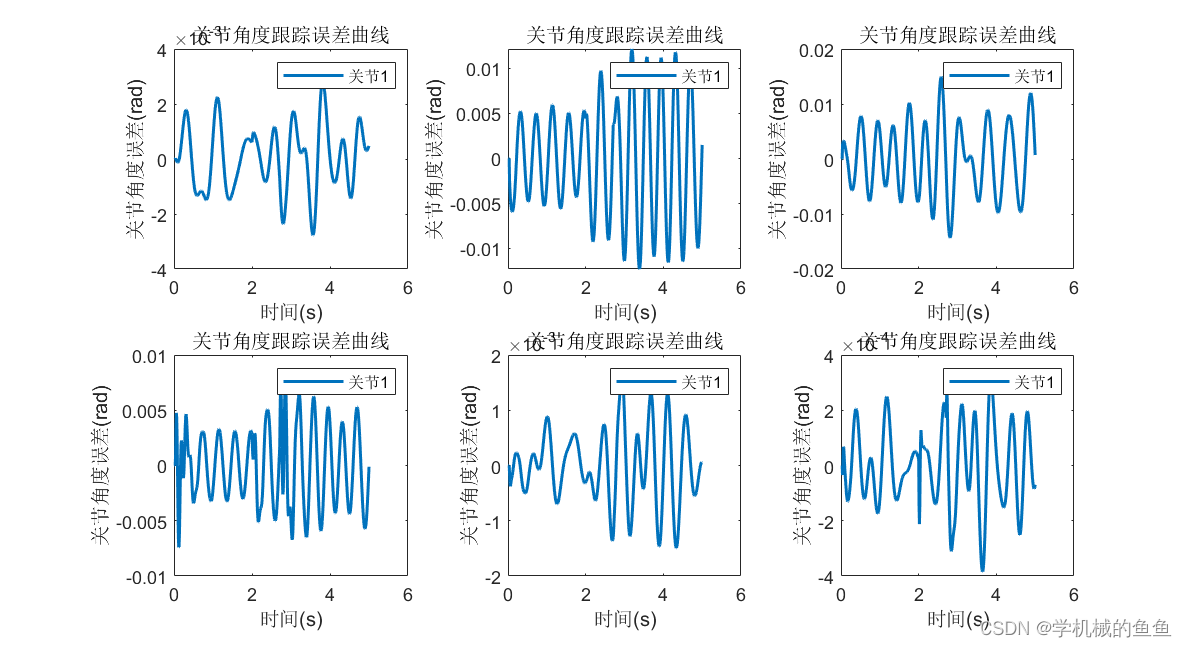
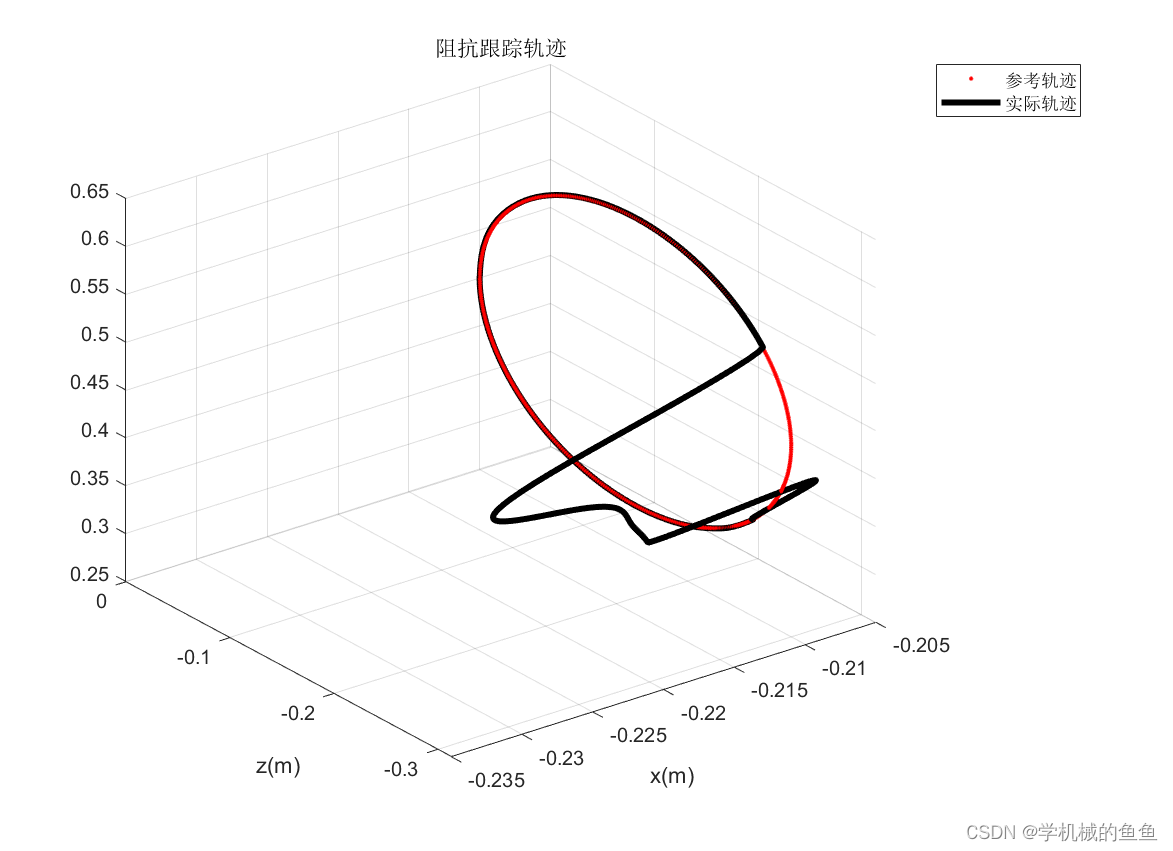
6.运行结果




这篇关于基于动力学的六自由度机器人阻抗恒力跟踪控制的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




