本文主要是介绍五自由度机器人机构设计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ABSTRACT
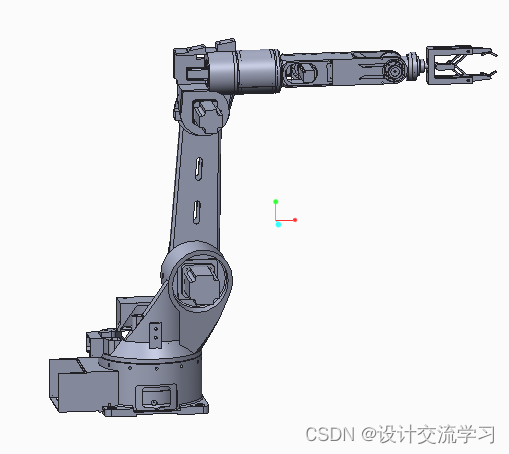
This paper designed a five DOF serial manipulator. First of all, through the calculated execution end driving torque, and this is the basis to select reducer and servo motor which the joint required, then design the shell and joint connection structure by 3D software . through the measurement , design part of the center of gravity for a shutdown required driving torque, select the desired speed reducer and servo motor, and so on. And final complete the overall design,and made a five DOF serial manipulator engineering drawing.
Key words: 5-dof serial manipulator overall design Servo motor
目 录
摘 要
ABSTRACT
1绪论
1.1概述
1.1.1机器人定义
1.1.2机器人的应用简况
1.1.3发展趋势
1.2研究内容
1.3本章小结
2搬运机械手结构设计
2.1机械手的组成
2.1.1执行机构
2.1.2驱动机构
2.2机械手的分类
2.3机械结构设计与分析
2.4传动、驱动方式的分析与选择
2.5本章小结
3机器人手部的设计
3.1手部设计要求
3.2 驱动力的计算
3.3两支点回转式钳爪的定位误差的分析
3.4 手抓夹持范围计算
3.5本章小结
4总体设计
4.1总体设计参数
4.2设计原理
4.3传动设计
4.4关节处设计
4.5手臂设计
4.6整体设计
4.7本章小结
5静力矩估算与电机、减速器的选择
5.1电机、减速器的选择
5.1.1手腕转动
5.1.2手臂俯仰
5.1.3小臂俯仰
5.1.4大臂俯仰
5.1.5大臂转动
5.2手臂的校核计算
5.3轴的校核
5.4本章小结
参考文献
致 谢
……

这篇关于五自由度机器人机构设计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








