激光雷达专题

基于UE5和ROS2的激光雷达+深度RGBD相机小车的仿真指南(五):Blender锥桶建模
前言 本系列教程旨在使用UE5配置一个具备激光雷达+深度摄像机的仿真小车,并使用通过跨平台的方式进行ROS2和UE5仿真的通讯,达到小车自主导航的目的。本教程默认有ROS2导航及其gazebo仿真相关方面基础,Nav2相关的学习教程可以参考本人的其他博客Nav2代价地图实现和原理–Nav2源码解读之CostMap2D(上)-CSDN博客往期教程: 第一期:基于UE5和ROS2的激光雷达+深度RG

【LVI-SAM】激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节
激光雷达点云处理特征提取LIO-SAM 之FeatureExtraction实现细节 1. 特征提取实现过程总结1.0 特征提取过程小结1.1 类 `FeatureExtraction` 的整体结构与作用1.2 详细特征提取的过程1. 平滑度计算(`calculateSmoothness()`)2. 标记遮挡点(`markOccludedPoints()`)3. 特征提取(`extractF
结合hokuyo的UST-10LX激光雷达在turtlebot上建图
本人手上所用的激光雷达是hokuyo的UST-10LX型号,接口是网口类,要将其放在turtlebot上进行SLAM建图,修改的文件和USB接口的雷达一样,但是内容上有细微差异。我也是找了好些博客综合而来,有错误的地方还请大神们多多指教。 首先,得先弄明白几点情况: 1.在ROS上安装包有两种方式,一种是通过apt-get insatll安装Debian文件,一种是源文件安装。我学习ROS不深

Hokuyo,UST-10LX,网口类激光雷达使用
Hokuyo激光雷达UST-10LX: 如果使用的是USB接口的激光雷达,直接看ROS-wiki的教程就可以了: http://wiki.ros.org/hokuyo_node/Tutorials/UsingTheHokuyoNode 1.首先下载相关节点包,UST-10LX采用的接口是以太网接口,所以需要下载urg_node的包, $ sudo apt-get install ros-i

LiDAR 8 激光雷达行业
激光雷达应用的领域特别广泛,在无人驾驶上的应用受到很大的关注。 全球汽车领域激光雷达的厂商, 生态链厂商, 相信激光雷达在产品和技术上的发展还会有很广阔的天地。

LiDAR 5 相控阵激光雷达 (OPA LiDAR)
OPA LiDAR相控阵激光雷达的技术核心是OPA scanner。Quanergy S3激光雷达Transmitter OPA: Leddar Tech OPA LiDAR模块: 相控阵Phase array实现方式: Phase array/ Emitter/ Antenna结构:

LiDAR 4 固态激光雷达 (Flash LiDAR)
固态激光雷达分为Flash LiDAR和OPA (Optical Phased Array) LiDAR,Flash LiDAR是非扫描式的,OPA LiDAR 是扫描式的。Flash LiDAR的发射光源和接收部件都是阵列式结构。 Leddar Tech的Flash LiDAR模块, Linear array光源从上至下依次点亮,形成一个点阵面。 Ibeo的方案, 发射光源为VCSEL,128列

LiDAR 3 MEMS激光雷达
与传统机械雷达相比,MEMS (Micro-Electro-Mechanical Systems) 激光雷达使用微型的MEMS mirror反射光线,用微机电执行器代替电机,有些厂商也称MEMS激光雷达为固态雷达。 以Leddar Tech的MEMS激光雷达模块为例, 另外一个示例 MEMS micro-mirror有电磁式Electro-Magnetic,压电式Thin-Film Piezo

LiDAR 2 机械激光雷达
实例分析Valeo SCALA I, SICK LMS291, Velodyne HDL-64E, Livox(DJI) MID-70几款激光雷达,机械激光雷达特点是通过电动执行器带动镜面,透镜或者机体旋转进行扫描。 Valeo SCALA I 利用多边体镜面反射光束,并由电机带动高速旋转。当几个镜面角度不一样时,可以发射出几道光幕。工作原理: SICK LMS291 一个比较

Emgu-WPF 激光雷达研究-定位实现
特定位置或障碍物位置定位实现。 读取激光雷达数据并存储于本地作为测试数据。每一帧数据对同一障碍物的定位信息均存在偏差。所以先对需要定位的点进行数据取样。取样过程中,遇到数据丢失,或检测到多个障碍物(不满足障碍物生存指数的障碍物未在UI界面绘制)则丢弃已经采样到的数据,重新开始采样,样本数足够后,执行均值点计算。 执行均值计算后,将计算的点位信息保存至配置文件并在UI界面绘制出来,重新加载测

Emgu-WPF 激光雷达研究-移动物体跟踪
接前两篇博客: 激光雷达数据解析并绘制雷达图 https://blog.csdn.net/u013224722/article/details/80738619 激光雷达-移动物体检测 https://blog.csdn.net/u013224722/article/details/80738995 以及仅用WPF处理:绘制2D激光实时图 https://blog.csdn.net/u01

WPF特效-绘制实时2D激光雷达图
接前两篇: https://blog.csdn.net/u013224722/article/details/80738619 https://blog.csdn.net/u013224722/article/details/80738995 除了c# GDI 、Opencv(c++)、 c# Emgu绘图外,其实c# WPF绘图功能也很强大。上文中之所以最终使用了Emgu绘图 ,只是因为

Emgu-WPF 激光雷达研究-移动物体检测
接上篇: https://blog.csdn.net/u013224722/article/details/80738619 先pose出效果图,下次撰写思路。 WPF录屏经典源码分享: https://github.com/NickeManarin/ScreenToGif https://github.com/NickeManarin/ScreenToGif/releases 运动物

Emgu-WPF 激光雷达研究-绘制雷达图
硬件:Hokuyo URG04LX 环境:VS2017- win10- 64 Emgu_3.2.0.2682 语言:C# WPF 数据解析参考: https://sourceforge.net/p/urgnetwork/wiki/Home/ https://github.com/bqhdev/urg04lx_data_decoder http://sourceforge.ne

激光雷达定位算法在FPGA中的实现——section2 全局坐标和角度计算
1、全局坐标矩阵X 在section1中已经就激光雷达的全局坐标公式进行了推导,得到 其中, 这里需要计算出矩阵X里面的x,y,cosα,sinα。 关于这个计算公式的求解,方阵的逆矩阵计算成为关键步骤。 2、方阵的逆变换 2.1 4*4

SPR系列单点激光雷达测距传感器|模组之CAN-OPEN软件调试说明
SPR系列单点激光雷达测距传感器|模组利用激光束的时间飞行原理来测量距离。它们发射出一个脉冲激光,并测量激光从传感器发射到击中物体并返回的时间来计算距离。 SPR系列单点激光雷达测距传感器|模组在测量精度要求较高的应用中常被使用,应用范围广泛,可以用于距离测量、障碍物检测、定位导航、环境感知等诸多方面,为自动化、机器人技术和智能系统提供重要的数据支持。 SPR系列单点激光雷达测距传感器|模组,

SPR系列单点激光雷达测距传感器|模组的安装与联机接线方法
SPR系列单点激光雷达测距传感器|模组,支持0-10米测距,产品涵盖SPR0510100、SPR0510100、SPR05201、SPR0510100、 SPR0530100、SPR0550100、SPR0560100、 SPR1010100、SPR1020100、SPR1030100、SPR1050100、SPR1060100 等型号。 SPR系列单点激光雷达测距传感器|模组利用激光束的时

基于成像激光雷达的鲁棒位置识别
点云PCL免费知识星球,点云论文速读。 文章:Robust Place Recognition using an Imaging Lidar 作者:Tixiao Shan, Brendan Englot, Fabio Duarte, Carlo Ratti, and Daniela Rus 编译:点云PCL(ICRA 2021) 开源代码:https://github.com/TixiaoSha

激光雷达的强度标定及路标提取
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。 摘要 自动驾驶对高精地图的需求日益重要,本文主要是研究3D激光雷达传感器如何进行强度标定,能够利用标定后的强度信息实现路标的提取和识别, 典型的激光雷达传感器测量值包

速腾32线激光雷达使用方法
速腾32线激光雷达 + 12V电源 + 实体机ubuntu22.04 + ROS2-humble 一、软件安装 mkdir robosense_wscd robosense_wsmkdir src && cd src/git clone https://github.com/RoboSense-LiDAR/rslidar_msg.gitgit clone https://githu


# ROS 获取激光雷达数据 (Python实现)
ROS 获取激光雷达数据 (Python实现) 实现思路 构建一个新的软件包,包名叫做lidar_pkg在软件包中新建一个节点,节点名叫做lidar_node.py在节点中,向ROS大管家rospy申请订阅话题/scan,并设置回调函数为Lidarcallback()构建回调函数Lidarcallback(),用来接受和处理雷达数据调用loginfo()显示雷达检测到的前方障碍物的距离 代码
自动装车系统车辆定位-激光雷达解决方案
在自动装车系统中,激光雷达为车辆定位提供了一种高效且精确的解决方案。以下是关于这一解决方案的详细分析: 一、解决方案概述 激光雷达解决方案在自动装车系统中,通过发射激光束并接收目标反射回来的信号,来探测车辆的位置、状态等信息,进而实现对车辆的精准定位。 二、激光雷达系统组成 激光发射机:负责将电脉冲转换成光脉冲并发射出去。光学接收机:接收从目标反射回来的光脉冲,并将其还原成电脉冲。转台:使
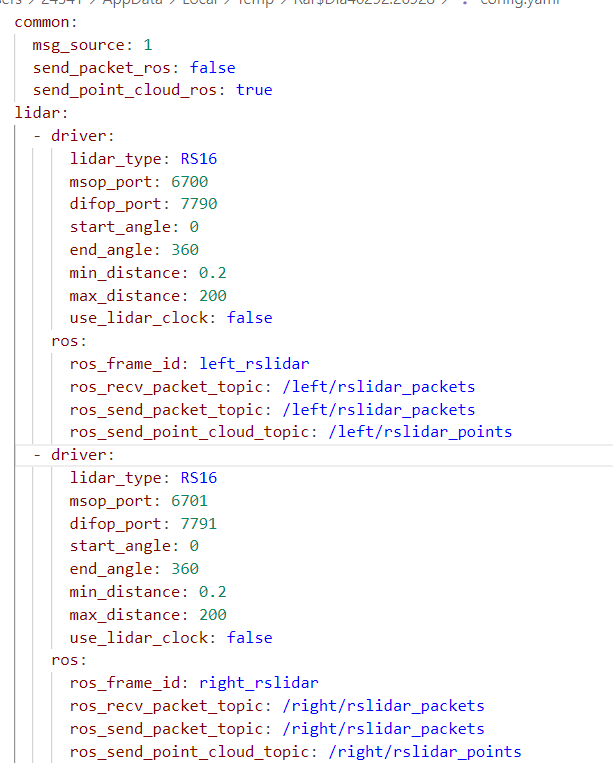
多激光雷达ip与端口配置
首先是雷达的ip 我们连上雷达,想要进入雷达的上位机的时候,需要对本机ip进行一些配置: 第一个是ip,第二个是掩码,第三个是网关。 其中ip可以通过wireshark来进行读取,一般就是192.168.102(雷达默认) 然后掩码255.255.255.0 最后网关就192.168.1.1 然后雷达自己的ip默认是192.168.1.200 用默认的ip来进入雷达的配置修改界面,可以看到雷达