世界坐标专题

Android OpenGL ES 2.0 屏幕坐标和3D世界坐标转换
背景 由于项目中需要用到屏幕坐标和3d坐标相互转换的功能。经过我查询大量资料,发现很多文章都只是说明了OpenGL的坐标系统和坐标变换的过程。并没有实现转换坐标的代码示例。介绍坐标系统的文章很多,请自行百度。下面我说一下实现坐标变换的思路和代码。 坐标变换思路 在网上查询了很久,有写文章说到OpenGL 有一种拾取方式为射线拾取,是可以获取的屏幕到3D模型坐标之间的转换的。但是我并没有找到代

ThreeJS geometry的顶点世界坐标
<!DOCTYPE html><html lang="en"><head><meta charset="UTF-8"><title></title><style>body {margin: 0;overflow: hidden;/* 隐藏body窗口区域滚动条 */}</style><!--引入three.js三维引擎--><script src="../../three.js-master/
航拍无人机像素坐标转世界坐标
一、背景 已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正 二、代码 import numpy as np import cv2 # 畸变校正 def undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist): k0
python实现无人机航拍图片像素坐标转世界坐标
背景 已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正 脚本 import numpy as npimport cv2# 畸变校正def undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist):k0,k1,k2,k3

Unity世界坐标下UI始终朝向摄像机
Unity世界坐标下UI始终朝向摄像机 1、第一种方法UI会反过来 void Update(){this.transform.LookAt(Camera.main.transform.position);} 2、第二种方法 Transform m_Camera;void Start(){m_Camera = Camera.main.transform;}void LateUpdate
OSG学习笔记16 - 对点选物体平移(鼠标点选物体)(物体随鼠标移动)(屏幕坐标转世界坐标)
之前的一篇博文是有一篇对点选物体进行平移、缩放旋转。那一篇是很简单的调用了OSG中定义的一些dragger,但这些dragger都有坐标轴或者tapbox等在模型上,与我最近要做的事情的需求不同。网上也找了好久,最终还是自己一点一点,参考老师之前写的代码,然后在亲爱的童童师兄的帮助下,实现了这么一个小小的功能。虽然代码写的乱糟糟的。 这里就简单记录一下整个思路吧。 1、构造一个事件处理器,也就

3d模型旋转世界坐标输入怎么用?怎么设置?---模大狮模型网
在3D建模和动画领域,模型的旋转是常见的操作之一。而当我们谈到模型的旋转时,经常会涉及到世界坐标和局部坐标这两个概念。世界坐标是描述物体在三维空间中绝对位置的坐标系统,而局部坐标则是相对于物体自身坐标系的坐标系统。本文将详细介绍如何在3D建模软件中使用世界坐标输入进行模型旋转,并给出具体的设置步骤。 一、理解世界坐标与模型旋转 在进行模型旋转之前,我们需要明确世界坐标与模型旋转之间的关

【3dmax笔记】020:变换输入、世界坐标、屏幕坐标案例详解
文章目录 一、变换输入二、世界坐标三、屏幕坐标四、区别 一、变换输入 变换输入可用于:移动/旋转/缩放变换输入,快捷键为F12,在变换输入窗口中,有两种常见重要的坐标系: 世界坐标:固定屏幕坐标:随着选择的视图发生变化 在3ds Max中,世界坐标(World Coordinate System)和屏幕坐标(Screen Coordinate System)是用于描

Unity功能——开发中逻辑坐标和世界坐标是什么?
声明:本文为个人笔记,用于学习研究使用非商用,内容为个人研究及综合整理所得,若有违规,请联系,违规必改。 Unity功能——逻辑坐标和世界坐标 文章目录 Unity功能——逻辑坐标和世界坐标一.开发环境二.问题描述三.概念及用法逻辑坐标世界坐标坐标单位两种坐标区别: 四.总结 一.开发环境 Unity无版本限制 VS无版本限制 二.问题描述 逻辑坐
3d世界坐标转换到某个二维平面。
有个功能需要截取某个平面的点云数据,然后计算宽高。需要将3d点投影到二维平面上。 //将3d坐标点转换为2d/*** 法向量(A, B, C)* 常量D* 原点x0,y0,z0* 方向向量(vx, vy, vz)* 投影点(x,y,z)* public static double[] Convert3DPointTo2D(double A, double B, double C
qt的three.js偶尔获取世界坐标不正确的问题
当一个object3D对象的position或者rotation发生变化时,使用object3D对象的getWorldPosition()返回的世界坐标可能不正确。因为three.js的相对坐标改变后世界坐标默认不会自动更新,而是到了渲染时才更新。 解决办法:在更改相对坐标后,如果要马上获取其世界坐标或者子对象的世界坐标,首先要调用object3D对象的updateMatrixWorld()强制
鼠标屏幕坐标转换到世界坐标纯c++代码实现
再讲述屏幕坐标到世界坐标之前,我们先看一下 物体从场景的坐标如何变换成屏幕坐标上显示的过程: 自然可以从世界到屏幕,那么屏幕到世界也就更好理解。 当我们在计算机图形学中处理场景中的物体时,这些物体通常由它们的顶点(vertices)组成,每个顶点都有一个三维坐标,表示在场景中的位置。这些顶点经过一系列变换后,最终被投影到屏幕上的二维坐标上。 1. 场景中的物体坐标 首先,让我们考虑一个简单
OSG中获取视点的世界坐标
OSG中获取视点的世界坐标: (1)osg::Vec3 vPosEye, vCenter, vUp; cameraMaster->getViewMatrixAsLookAt( vPosEye, vCenter, vUp);//获取世界坐标系下的视点值 (2)//主相机 osg::ref_ptr<osg::Camera> cameraMaster = vi
cesium 调整3dtiles的位置 世界坐标下 相对坐标下 平移矩阵
cesium调整3dtiles的位置用到的是平移矩阵,原理是在世界坐标系中用偏移点减去原始点得到一个平移向量,再根据这个向量得到平移矩阵。 原始点:一般是模型的中心点位置,可通过模型的包围盒得到偏移点:可分为两种情况, 直接给出世界坐标系中的一个位置,这两个点在世界坐标系中没有相对关系给出模型的相对位置,比如说让模型沿x轴正方向偏10米,此时这个偏移点和模型就有相对关系,但是偏移点在世界

摄像机标定04_从单幅图像中提取世界坐标
从单幅图像中提取世界坐标 从原理上来说,使用标定后的摄像机可以在世界坐标系内进行未失真的测量。一般情况下只有使用多个摄像机在不同空间位置上同时拍摄同一物体的两幅或多幅图像,才可以进行这种测量,这种方式被称为立体重构。使用这种方法重构两幅图像中对应点的三维位置是可以实现的,因为两个摄像机光心与两幅图像中在成像平面上的对应点可以定义两条光线,这两条光线在三维空间中的交点就是图像中相应点的三维位置。
threejs 组-层级模型 | 本地坐标和世界坐标 | 局部坐标系和世界坐标系 | 本地矩阵.materix和世界矩阵.matrixWorld
文章目录 组- THREE.Group递归遍历模型树结构object3D.traverse()object3D.add (object.Object3D..) 添加对象 和 object3D.remove(object.Object3D..) 移除对象 局部坐标系和世界坐标系辅助坐标器 AxesHelper 本地坐标和世界坐标 - 基于世界坐标系的位置本地坐标与世界坐标的理解 几何体与三维物
babylon中的世界坐标反算
//从uv、深度中反算世界坐标 vec3 getWorldPosition(vec2 uv, float textureDepth, mat4 projection, mat4 viewProjInvert){ float zclip = textureDepth * (zMax + zMin) - zMin; float zndc = projection[2].z / (1.0 - proje
mvp矩阵变换及世界坐标到屏幕坐标的实现
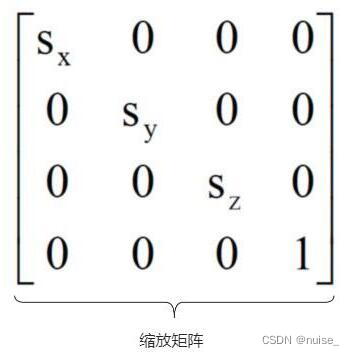
MVP矩阵是一种用于将对象的局部坐标(Model)转换到裁剪空间(Clip Space)的变换矩阵。MVP代表了Model-View-Projection,是由三个矩阵的组合构成的。 Model矩阵(M):模型变换用于将对象的局部坐标(模型空间或对象空间)转换到世界坐标系中。Model矩阵包括了平移、旋转、缩放等变换。 View矩阵(V):视图变换用于将世界坐标系中的坐标转换到相机的视角坐标

Unity 3D 3D坐标转换UI坐标(UGUI) 世界坐标转换UGUI坐标 以及Text Mesh使用
比如血条等的位置,实时跟随主角。 using UnityEngine;public class Game3DPosToUIPosMyTest : MonoBehaviour{public Transform targetTran;public RectTransform hpTran;public Camera uiCamera;public RectTransform canvasTra
渲染管线—局部坐标到世界坐标的转换
局部坐标和世界坐标 世界坐标是指3D空间的坐标系统,当我们制作模型时,并不清楚模型所在的世界的坐标系统是如何规定的,都是使用局部坐标系来建立模型。这样模型制作人员只需要负责好建立自己的模型即可。 转换原理 我们假设使用Model类来抽象一个物体 class Model{Vector3D Position;//物体的在局部坐标系的位置Vector3D WordPosition;//物体在世界
虚幻4本地坐标和世界坐标的转换(蓝图)
使用游戏引擎最免不了的就是本地坐标和世界坐标的转换,虚幻蓝图系统已经提供了非常完整的接口,这里简单介绍下,所有有关的蓝图函数都在这个页面。 Inverse Transform Location,传递一个物体的Transform信息,将一个世界坐标系下的点转换为本地坐标系下的点。 Transform Location,传递一个物体的Transform信息,将一个本地坐标下系的点转换为世界坐标
【OpenGL】鼠标点击获取世界坐标
【OpenGL】鼠标点击获取世界坐标 标签(空格分隔): OpenGL 起因 因为最近在做图形学相关毕设,需要时间鼠标交互获取三维坐标(世界坐标系)。于是在网上查了一些博客与资料,放进自己代码中,效果怎么都不对。于是才自己静下心来,好好研究。 OpenGL中的坐标系 OpenGL总共有5个坐标系,它们分别是: 局部空间或称物体空间世界空间观察空间或称视觉空间裁剪空间屏幕空间
计算机图形学 窗口 视口 世界坐标
首先提示:要想真正理解他们之间的区别与联系,只能通过自己亲自编程体会!! 另外强烈建议大家看看孙鑫视频教程第11讲,很好很强大。 在 Windows的作图函数中,涉及逻辑坐标到设备坐标的转换。 这里提到的窗口(window)、视口(viewport)是对应的概念。 视口是与设备相关的一个矩形区域,坐标单位是与设备相关的。 窗口的坐标是逻辑坐标,与设备无关。 窗口坐标的
halcon用于平面(2D)标定图像坐标与机械手世界坐标
原理:图像上的XY坐标经过旋转,平移后映射得到对应的机械手坐标(XY); 用到的Halcon主要算子: A1:求解变换矩阵,获取图像坐标点和机械手坐标点之间的映射关系; 1、vector_to_hom_mat2d(), A2:由像素坐标和标定矩阵求出机器人基础坐标系中的坐标 affine_trans_point_2d(HomMat2D,ImageRow,ImageColumn2,Wrd_

UGUI坐标与世界坐标的转换
UGUI坐标的转换网上网友说的很多,有正确的也有误导的,这里我通过实验来总结了一下正确的转换方式(假设你充分了解RectTransform坐标系和本地坐标、世界坐标的关系): 一、将UGUI坐标转化为世界坐标,比如说我想把一个3D模型A放在我的一个按钮B上面,B是在一个Canvas下的层层子节点(不一定是在Canvas的根目录哦) 转换之前先明确几个问题:

单目固定平面已知像素坐标求世界坐标方法
单目固定平面已知像素坐标求世界坐标方法 环境:固定单目与固定工作平面(所有world定位点在一个平面内) 把所有坐标转到相机坐标下计算,求出对应的相机坐标,然后转为自己需要的空间坐标,这里没考虑畸变,所有像素坐标都利用undistortpoints转换为无畸变坐标。求出的像素坐标也是无畸变结果 #--------------------------------- 相机坐标转为像素坐标: