rviz专题

三维坐标的旋转矩阵转换测试Demo(ROS1 RVIZ)
已知空间上的某一个点P在坐标系1下的位置为 P1(1,2,3),需要求出P在三维空间坐标系0之间的相对关系,其中坐标系1是相对于坐标系0绕着x轴旋转60度后转化。示意如下图 程序设计 定义P点在坐标系1下的位置 array = np.array([1,2,3])# [1 2 3] 定义坐标系1和坐标系0之间的旋转矩阵 PI = 3.14angle = 60/360*PItrans

带颜色的3D点云数据发布到ros1中(通过rviz显示)python、C++
ros中发布点云数据xyz以及带颜色的点云数据xyzrgb ros中发布点云数据xyz可以直接用python来做或者C++(看个人偏好) ros中发布带颜色的点云数据xyzrgb环境1.新建ROS工作空间2.创建功能包 ros中发布点云数据xyz 可以直接用python来做或者C++(看个人偏好) 在这里我们带有颜色的点云数据格式为x y z c 其中c值为float型,有四

C++入门 ros中urdf整合rviz
一、 开发环境 ubuntu20.04 ros版本noetic 参考视频 https://www.bilibili.com/video/BV1Ci4y1L7ZZ/?p=52&spm_id_from=333.1007.top_right_bar_window_history.content.click&vd_source=4cd1b6f268e2a29a11bea5d2568836ee 二、 编

ROS学习笔记(八)::RVIZ::Interactive Markers: Writing a Simple Interactive Marker Server
1 Interactive Markers: Interactive Markers: Writing a Simple Interactive Marker Server 说明:本教程介绍了如何设置一个管理交互标志物的最简单的服务器。 2.内容 如果你运行如前面的教程中介绍,interactive_marker_tutorials的simple_marker例子,你会在RViz

ROS学习笔记(七)::RVIZ::Interactive Markers: Basic Controls
1.Interactive Markers: Basic Controls基本控件 说明:这篇教程说明base_controls教程代码如何工作 2.basic_controls教程说明: 本教程介绍你在设计交互标志物时最常用的选项。节点将从RViz得到的所有反馈打印到命令行上。 所有交互标志物包含一个灰色盒子。在大多数情况下,这个灰色盒子会与对照的其余控件一起移动。

rviz和URDF的生成
在ROS(Robot Operating System)中,.rviz文件是一种配置文件,用于存储RViz(ROS Visualization Tool)的布局和设置。当你在RViz中调整视图,添加话题(topics)、显示类型(displays)和其他参数后,可以保存这些配置,以便下次直接加载相同的设置,而不需要重新配置。下面是生成.rviz配置文件的步骤: 启动RViz: 首先,你需要启动

ROS常用组件_rviz三维可视化平台
RViz三维可视化平台 机器人系统中存在大量数据,但是数据形态的值往往不利于开发者感受数据所描述的内容,所以常常需要将数据可视化显示。 ROS针对机器人系统的可视化需求,为用户提供了一款显示多种数据的三维可视化平台——RViz rviz很好的兼容了各种基于ROS软件框架的机器人平台。在rviz中,可以使用XML对机器人、周围物体等任何实物进行尺寸、质量、位置、材质、关节等属性的描述,并且在界
第 6 章 URDF、Gazebo与Rviz综合应用(自学二刷笔记)
重要参考: 课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ 讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 6.7.4 kinect信息仿真以及显示 通过 Gazebo 模拟kinect摄像头,并在 Rviz 中显示kinect摄像头数据。 实现流程: kinect摄像头仿
ros-param添加参数控制rviz显示掉帧问题
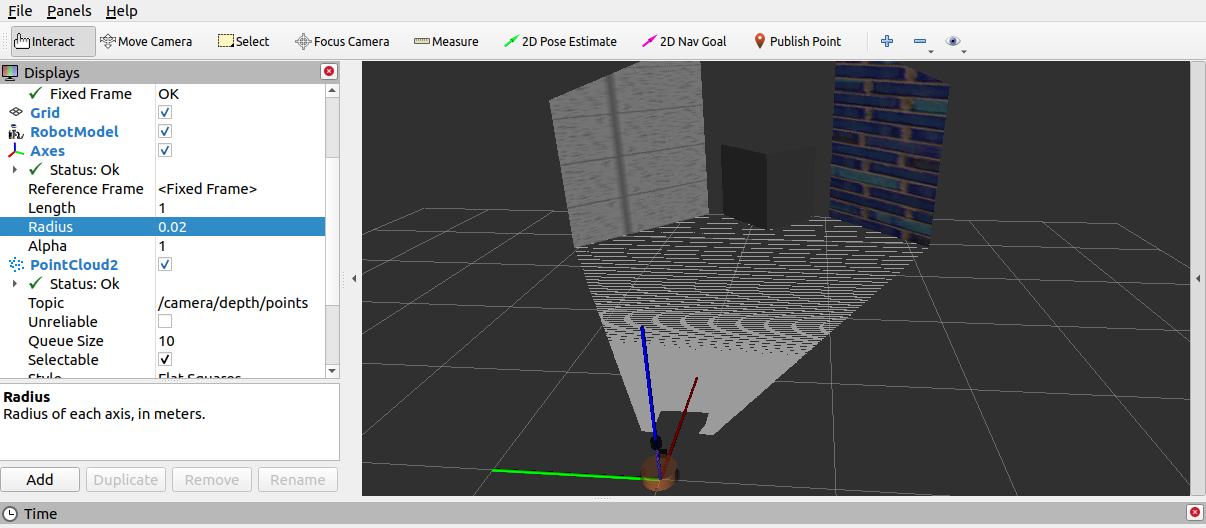
在ros中有一套参数系统可以直接写到launch文件中,这样非常方便,不需要编译就能直接用,这对于c++来说非常的有好,这里记录一下如何使用。 主要步骤如下: 首先初始化节点 使用nodehandle进行管理,然后通过param管理参数 其他操作… 是不是非常简单,以下是一个例子: #include <ros/ros.h>#include <sensor_msgs/PointCloud2.h>
ROS学习——Rviz显示电脑摄像头视频
ROS学习——Rviz显示电脑摄像头视频 准备工作使用Rviz使用Rviz显示摄像头视屏显示 准备工作 在虚拟机设置中,将USB设置为3.1 将虚拟机摄像头连接到主机 使用cheese命令打开摄像头看是否连接成功 使用Rviz roscorerviz
ros小问题之差速轮式机器人轮子不显示(rviz gazebo)
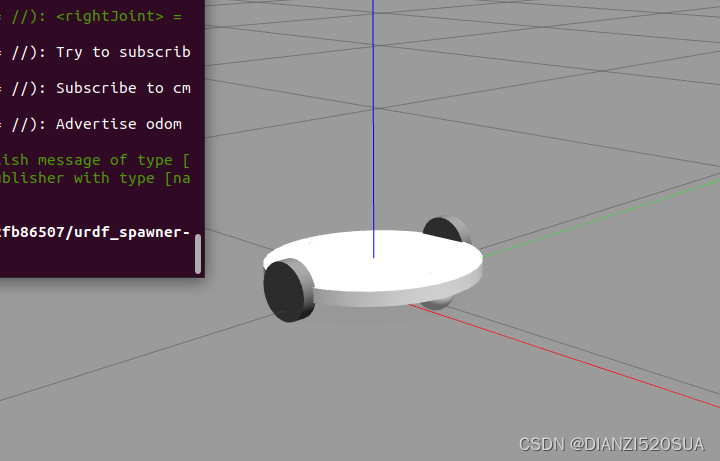
在rviz及gazebo练习差速轮式机器人时,很奇怪,只有个机器人的底板及底部的两个万向轮,如下图, 后来查看相关.xacro文件,里面是引用包含了轮子的xacro文件,只需传入不同的参数即可调用生成不同位置的轮子,精简了代码。找到定义轮子的xacro文件,在惯性那行增加xacro:即可,如下图所示,否则会找不到相关的值替换,自然不显示。 最终效果如下。 其他部件
ROS-Tutorials:rviz之Markers: Sending Basic Shapes (C++,附vscode调试说明)
官方的教程在这里:rviz/Tutorials/Markers: Basic Shapes - ROS Wikihttps://wiki.ros.org/rviz/Tutorials/Markers%3A%20Basic%20Shapes 我自己在ubuntu20.04上运行时碰到了一些问题,所以记录一下, mkdir -p prj001/srccd prj002/srccatkin_cr
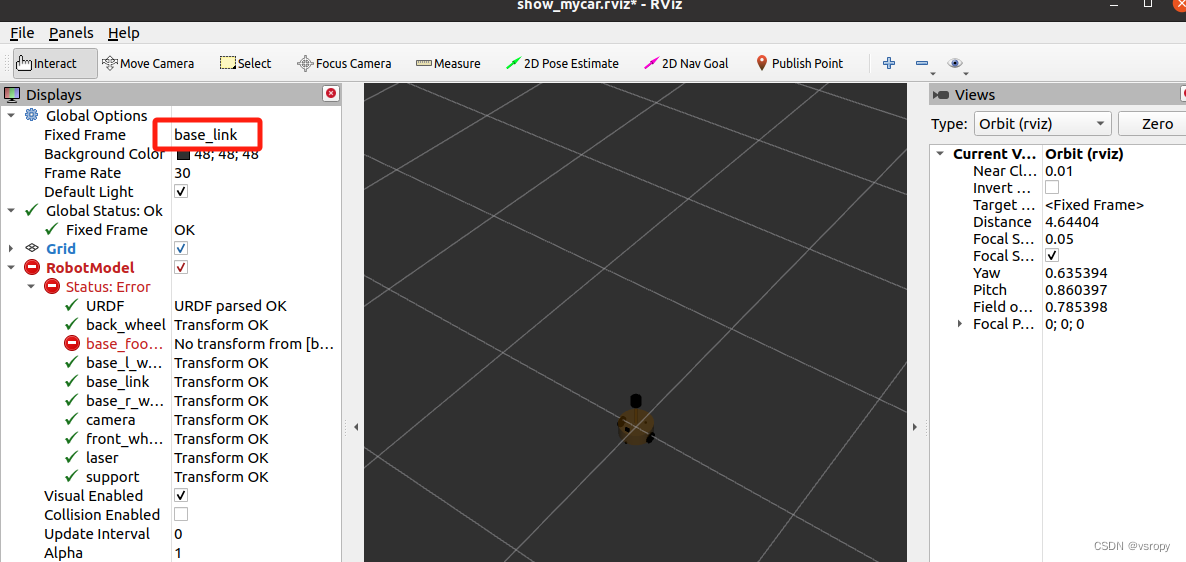
rviz上不显示机器人模型(模型只有白色)
文档中的是base_footprint,需要根据自己所设的坐标系更改,我的改为base_link 如何查看自己设的坐标系: 这些parent父坐标系就是 同时打开rviz后需要更改成base_link

ros| 怎么打开rviz
1、电脑连接上小车的wifi 2、终端输入代码 ssh wheeltec@192.168.0.100 @后面为小车ip 再输入代码 roslaunch turn_on_wheeltec_robot navigation.launch wheeltec_robot是我的小车的名字 3、再打开一个新的终端输入 rviz 就可以 ps:如果报错或者打不开 很可能是因为小车和
![[可视化] rviz的可视化(python)](https://img-blog.csdnimg.cn/direct/f0a4d515496140299a71240a26ed70f4.png)
[可视化] rviz的可视化(python)
文章目录 1. ros jsk_recognition_msgs 中BoundingBox绘制(目前只有ros1,ros2中无组件)2. ros marker 绘制bounding box (适用ros1, ros2)2.1 利用LINE绘制box2.2 利用CUBE绘制box2.3 利用arrow绘制heading2.4 利用text绘制box's score2.5 利用DELETEALL
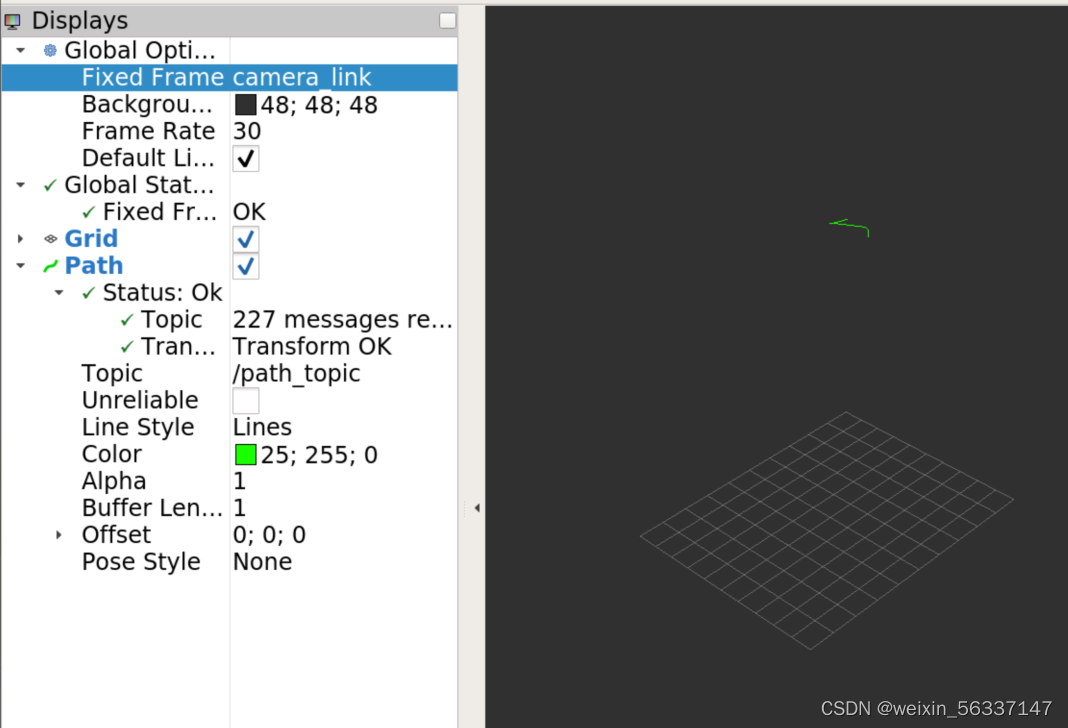
ros rviz基础操作 绘制线条 显示tf 显示odom
ROS 当先所有代码的git仓库 https://gitee.com/tianxiaohuahua/upper_computer_rviz 一、基础 1.创建工作空间 catkin_ws 创建src文件,放置功能包源码: mkdir -p ~/catkin_ws/src 进入src文件夹: cd ~/catkin_ws/src 初始化文件夹: catkin_init_wor

8、在ubuntu16.04 、ROS下使用 rviz 显示octomap_sever 构建的三维栅格地图
ROS下使用 rviz 显示octomap_sever 构建的三维栅格地图 本文是在安装完了octomap_sever 后(octomap_sever安装方法在这里:octomap_sever安装及demo、自己的pcd点云数据测试,基于八叉树的三维的栅格地图构建),使用ROS 自带的RVIZ显示自己的PCD点云文件构建的八叉树的教程。 1、安装octomap 在 rviz 中的插件: su

rviz似乎是显示的你选择的话题消息,就像rqt_image_view一样,把你选择的topic以图形化的方式展现出来。
rviz似乎是显示的你选择的话题消息,就像rqt_image_view一样,把你选择的topic以图形化的方式展现出来。 这样就好理解了,所展现的图像都是有对应topic的。 所以你要看激光雷达的数据,就选择激光雷达的节点发布的topic进行展示就可以了。 rviz也可以像rqt_image_view一样订阅摄像头消息,显示出摄像头图像,那本质就是一样的了。 https:
kuka协作机器人LBR系列 issy15R930导入到ros2_rviz(带外观文件)
kuka协作机器人LBR系列 issy15R930导入到ros2_rviz(带外观文件)外观文件未调整好,外观仍需进一步研究,外观文件dae与轮廓(碰撞)文件STL并未完全对应起来。在blender里面看了一下UR机器人的文件,是对应的,本人导出的两种文件总是存在各中角度差。需要进一步研究。 本文参考了以下两篇文章,和UR的包,本文未详细论述的地方,也可以按参考文章中的相关章节

ROS URDF、rviz、gazebo(1)
文章目录 1.URDF优化_xacro:1.1.xacro语法:1.2.xacro之launch集成: 2.arbotix控制机器人运动:2.1.编写arbotix配置文件:2.2.配置launch文件:2.3.向话题发布信息: 3.URDF集成gazebo:3.1.创建功能包并导入相关依赖:3.2.编写URDF文件:3.2.1.collision:3.2.2.inertial:3.2.3.
使用ROS读取tum格式轨迹文件并在RVIZ显示的实现过程
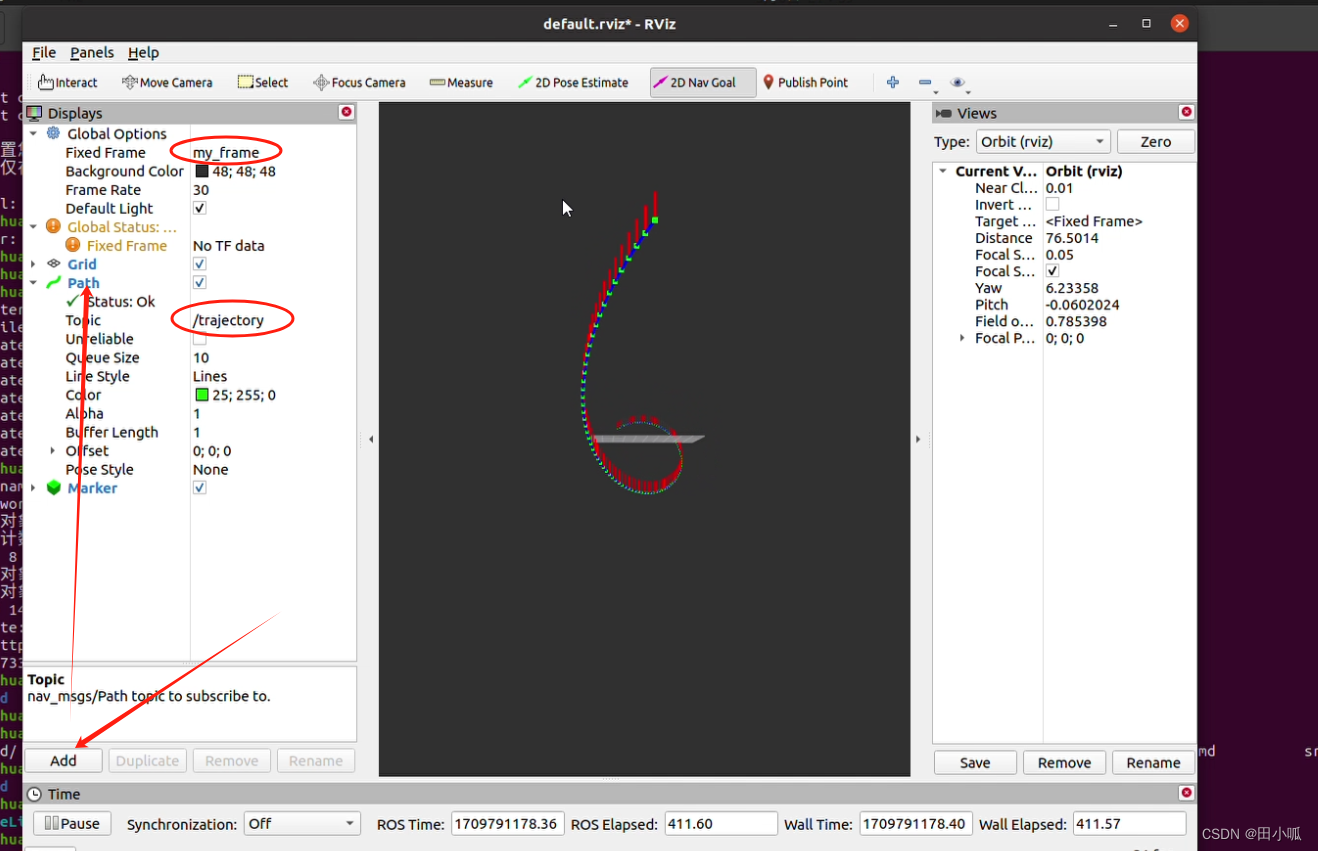
内容 有一个轨迹文本文件,使用ROS系统读取该文件,并将轨迹在RVIZ界面绘制。 先用EVO工具将tum格式轨迹文件转为bag格式; 再创建ROS功能包,订阅bag文件中的话题数据,处理再发布新的轨迹话题,同时新建线程发布TF。 最后编译、运行,多个终端发布开启roscore、启动功能包、打开rviz、播放bag。 实现过程 tum转bag 使用EVO工具将tum

ROS学习笔记(六)::RVIZ::Interactive Markers::Getting Started
1.互动标记物:入门 说明:这个教程解释了互动标记物是什么,和一些基本概念。 2.简介 交互式标记物是类似于在前面的教程描述的“正规”的标记,然而,它们允许用户通过改变其位置或旋转,还可以点击它们或从分配给每个标记的上下文菜单中选择东西与之互动。 它们由visualization_msgs/ InteractiveMarker消息表示,这个消息包含上下文菜单和几个控制(visualiza
ROS学习笔记(八)::RVIZ::Interactive Markers: Writing a Simple Interactive Marker Server
1 Interactive Markers: Interactive Markers: Writing a Simple Interactive Marker Server 说明:本教程介绍了如何设置一个管理交互标志物的最简单的服务器。 2.内容 如果你运行如前面的教程中介绍,interactive_marker_tutorials的simple_marker例子,你会在RViz
ROS学习笔记(七)::RVIZ::Interactive Markers: Basic Controls
1.Interactive Markers: Basic Controls基本控件 说明:这篇教程说明base_controls教程代码如何工作 2.basic_controls教程说明: 本教程介绍你在设计交互标志物时最常用的选项。节点将从RViz得到的所有反馈打印到命令行上。 所有交互标志物包含一个灰色盒子。在大多数情况下,这个灰色盒子会与对照的其余控件一起移动。

RViz成功显示多个机器人模型以及解决显示的模型没有左右轮
RViz显示机器人模型没有左右轮 一、RViz成功显示多个机器人模型机器人模型的左右轮无法显示 一、RViz成功显示多个机器人模型 在RViz中显示多个机器人模型需要设置好几个关键的参数 首先点击Add,找到RobotModel,添加进来 Fixed Frame:选择TF树最上层的坐标系,一般是世界坐标系,即固定不动的全局坐标系 Robot Description:/robot