本文主要是介绍第 6 章 URDF、Gazebo与Rviz综合应用(自学二刷笔记),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
重要参考:
课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ
讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
6.7.4 kinect信息仿真以及显示
通过 Gazebo 模拟kinect摄像头,并在 Rviz 中显示kinect摄像头数据。
实现流程:
kinect摄像头仿真基本流程:
-
已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加kinect摄像头配置;
-
将此文件集成进xacro文件;
-
启动 Gazebo,使用 Rviz 显示kinect摄像头信息。
1.Gazebo仿真Kinect
1.1 新建 Xacro 文件,配置 kinetic传感器信息
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro"><gazebo reference="kinect link名称"> <sensor type="depth" name="camera"><always_on>true</always_on><update_rate>20.0</update_rate><camera><horizontal_fov>${60.0*PI/180.0}</horizontal_fov><image><format>R8G8B8</format><width>640</width><height>480</height></image><clip><near>0.05</near><far>8.0</far></clip></camera><plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so"><cameraName>camera</cameraName><alwaysOn>true</alwaysOn><updateRate>10</updateRate><imageTopicName>rgb/image_raw</imageTopicName><depthImageTopicName>depth/image_raw</depthImageTopicName><pointCloudTopicName>depth/points</pointCloudTopicName><cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName><depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName><frameName>kinect link名称</frameName><baseline>0.1</baseline><distortion_k1>0.0</distortion_k1><distortion_k2>0.0</distortion_k2><distortion_k3>0.0</distortion_k3><distortion_t1>0.0</distortion_t1><distortion_t2>0.0</distortion_t2><pointCloudCutoff>0.4</pointCloudCutoff></plugin></sensor></gazebo></robot>1.2 xacro 文件集成
将步骤1的 Xacro 文件集成进总的机器人模型文件,代码示例如下:
<!-- 组合小车底盘与传感器 -->
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro"><xacro:include filename="my_head.urdf.xacro" /><xacro:include filename="my_base.urdf.xacro" /><xacro:include filename="my_camera.urdf.xacro" /><xacro:include filename="my_laser.urdf.xacro" /><xacro:include filename="move.urdf.xacro" /><!-- kinect仿真的 xacro 文件 --><xacro:include filename="my_sensors_kinect.urdf.xacro" />
</robot>1.3启动仿真环境
编写launch文件,启动gazebo,此处略...
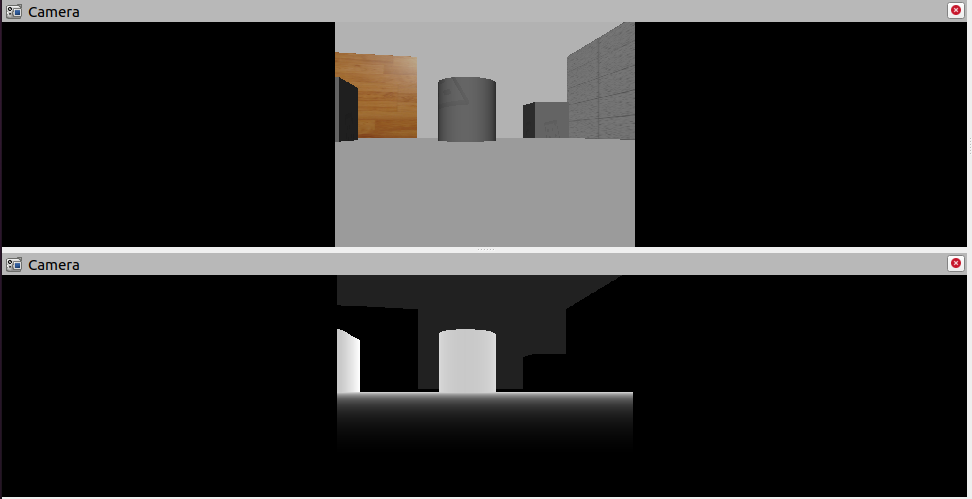
2 Rviz 显示 Kinect 数据
启动 rviz,添加摄像头组件查看数据

补充:kinect 点云数据显示
在kinect中也可以以点云的方式显示感知周围环境,在 rviz 中操作如下:
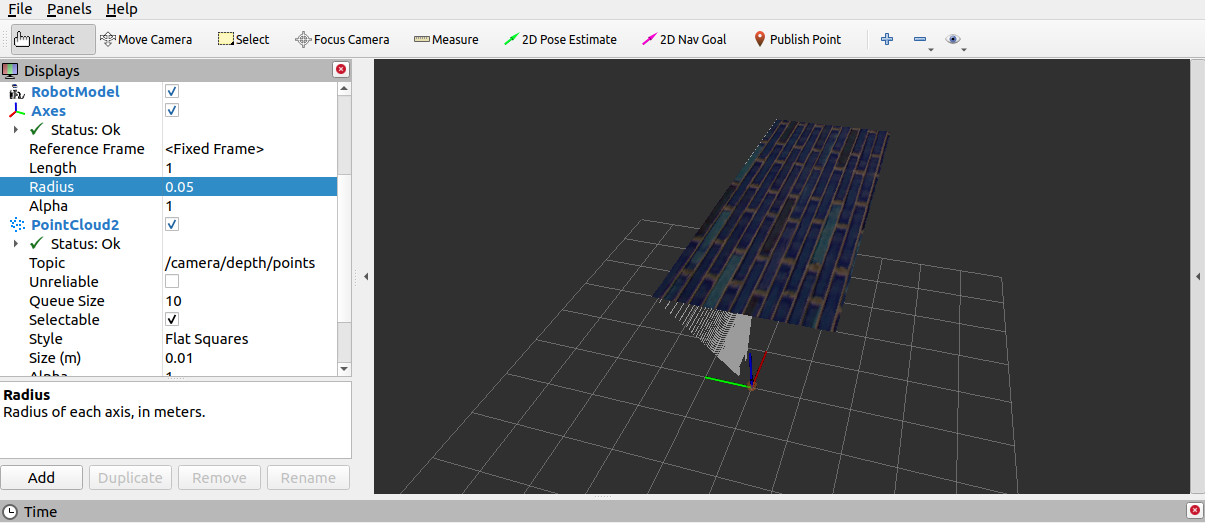
问题: 在rviz中显示时错位。
原因: 在kinect中图像数据与点云数据使用了两套坐标系统,且两套坐标系统位姿并不一致。
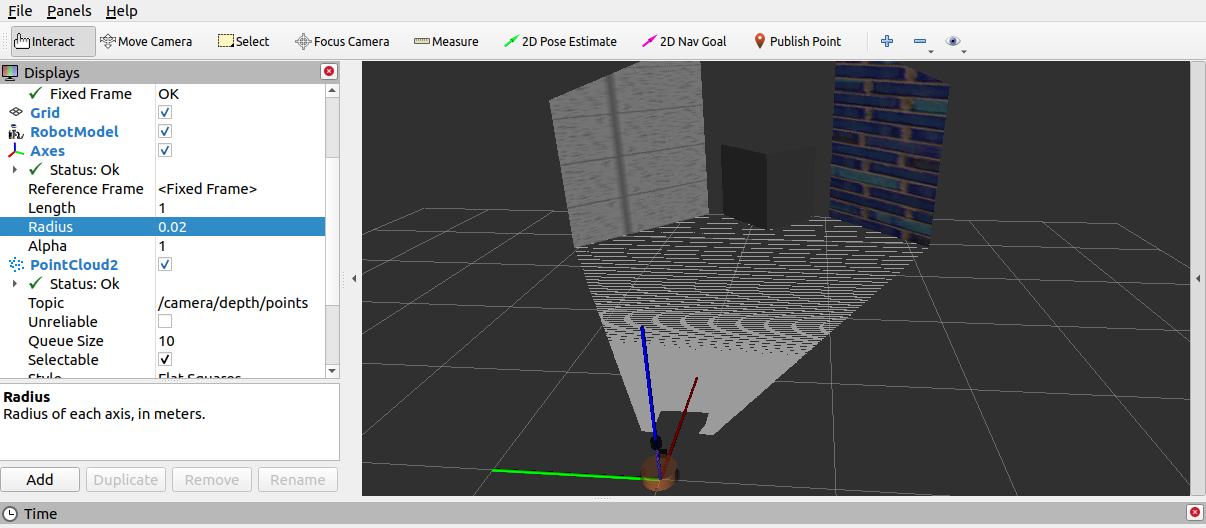
解决:
1.在插件中为kinect设置坐标系,修改配置文件的<frameName>标签内容:
<frameName>support_depth</frameName>2.发布新设置的坐标系到kinect连杆的坐标变换关系,在启动rviz的launch中,添加:
<node pkg="tf2_ros" type="static_transform_publisher" name="static_transform_publisher" args="0 0 0 -1.57 0 -1.57 /support /support_depth" />3.启动rviz,重新显示。
这篇关于第 6 章 URDF、Gazebo与Rviz综合应用(自学二刷笔记)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



