gazebo专题

gazebo 已加载模型但无法显示
目录 写在前面的话问题一:robot_state_publisher 发布机器人信息失败报错一 Error: Error document empty.报错二 .xcaro 文件中有多行注释成功启动 问题二:通过 ros2 启动 gazebo 失败成功启动 问题三:gazebo 崩溃和无法显示模型问题四: 缺少 robot_description 等话题正确的输出 写在前面的话
![[Doc][px4][ros2][gazebo][yolov8]PX4-ROS2-Gazebo-YOLOv8](https://i-blog.csdnimg.cn/direct/ab1456b7c811433f9d7af9ea130641a1.png)
[Doc][px4][ros2][gazebo][yolov8]PX4-ROS2-Gazebo-YOLOv8
GIT地址:Https://github.com/monemati/PX4-ROS2-Gazebo-YOLOv8 apt install python3.8-venv Create a virtual environment # createpython -m venv /home/xg/px4-venv# activatesource /home/xg/px4-venv/bi

turtlebot 测试 Gazebo Harmonic ROS Jazzy
源码移植后理论上支持所有Gazebo和ROS版本,但花费时间较多。 只推荐学习Gazebo 经典版和Gazebo Harmonic以及之后版本。 在中间的过渡版本,不推荐学习。 Gazebo经典版包括Gazebo 7 Gazebo 9 Gazebo 11。 Gazebo Harmonic 和 ROS2 jazzy 安装和测试-CSDN博客 Gazebo与ROS1、ROS2接口变迁-2

Gazebo Harmonic gz-harmonic 和 ROS2 Jazzy 思考题 建图和导航 SLAM Navigation
仿真 效果还挺好的。 SLAM建图 导航 …… 提示 这篇文档详细介绍了如何在ROS 2环境中使用SLAM(Simultaneous Localization and Mapping,即同时定位与地图构建)和Nav2(Navigation 2,ROS 2的导航框架)来让机器人一边构建环境地图一边进行导航。以下是对该文档的详细总结: 概述 文档主要面向ROS 2用户

Gazebo Harmonic 和 ROS2 jazzy 安装和测试
之前,提及使用CoppeliaSim_Edu_V4_7_0,那么备选Gazebo一定不能缺席! 使用大模型撰写移动机器人模拟器(CoppeliaSim、Gazebo、MORSE和Webots)的定量比较研究报告-CSDN博客 CoppeliaSim + Gazebo + ROS2 Jazzy 安装: 简洁: 179 sudo apt-get install lsb-r
【control_manager】无法加载,gazebo_ros2_control 0.4.8,机械臂乱飞
删除URDF和SDRF文件中的特殊注释#, !,: xacro文件解析为字符串时出现报错 一开始疯狂报错Waiting for '/controller_manager' node to exist 1717585645.4673686 [spawner-2] [INFO] [1717585645.467015300] [spawner_joint_state_broadcaster]:
gazebo插入一个图片
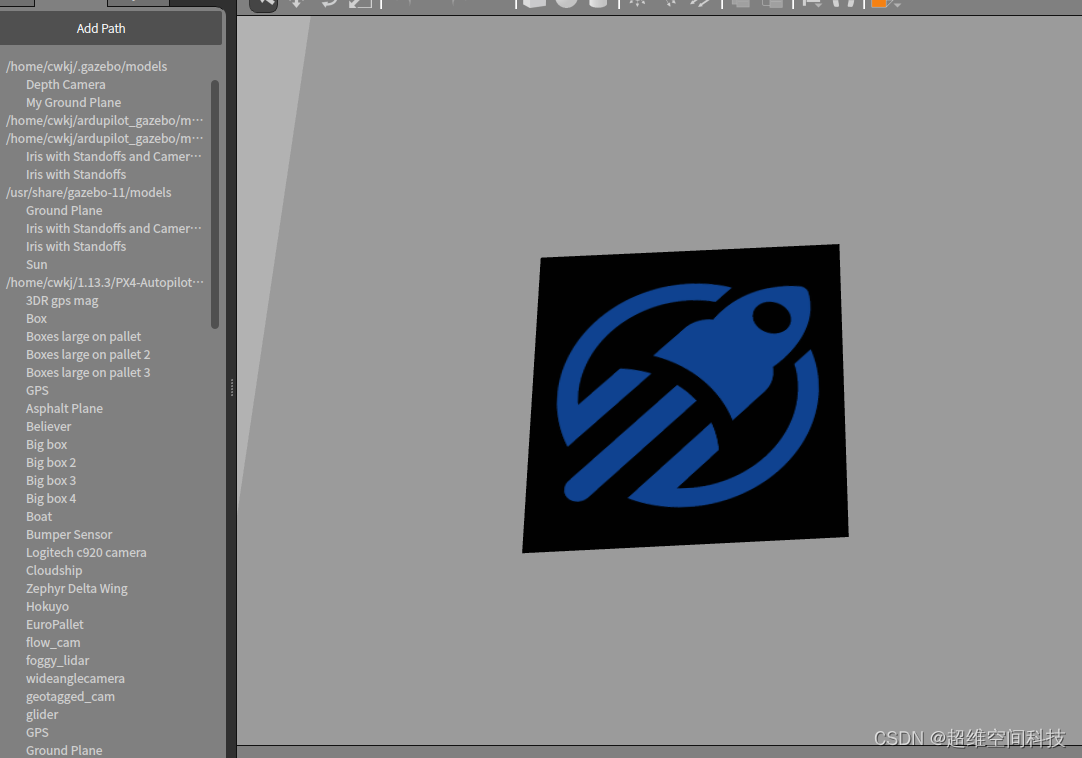
在下面的目录下添加文件夹 my_ground_plane 文件夹内容如下 model.sdf <?xml version="1.0" encoding="UTF-8"?><sdf version="1.4"><model name="my_ground_plane"><static>true</static><link name="link"><collision name="collisi


安装 Gazebo 基于 Arm64 Ubuntu 22.04
安装 Gazebo 基于 Arm64 Ubuntu 22.04 由于种种原因,Debian/Ubuntu 官方只发布了基于 Amd64 的 Gazebo 包,而没有发布基于 Arm64 的 Gazebo 包。所以想要在 Ubuntu 22.04 中下载基于 Arm64 的 Gazebo 包,不能利用官方源。 解决方法: sudo add-apt-repository ppa:openrobo
【声呐仿真】学习记录3.5-docker中Gazebo是否使用GPU?解决声呐图像黑屏
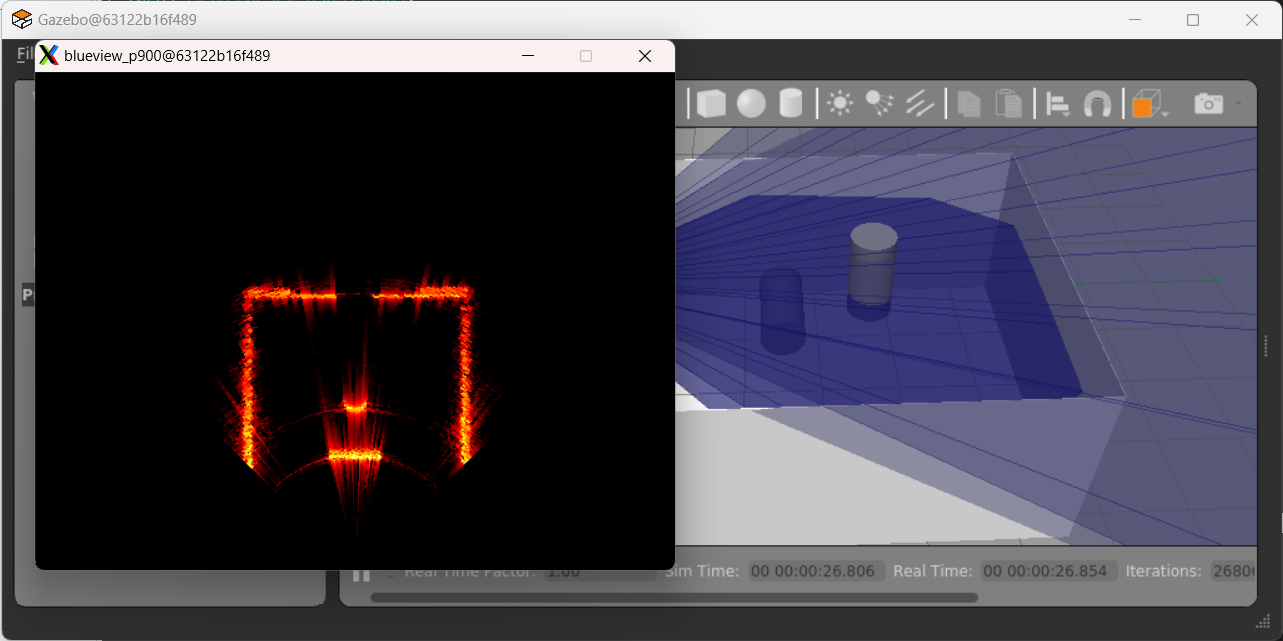
【声呐仿真】学习记录3.5-docker中Gazebo是否使用GPU?解决声呐图像黑屏 🤡打包镜像,重装驱动(失败)Xorg重新配置DAVE环境(补充之前教程中的一些细节)解决声呐图像黑屏问题 在容器中运行 roslaunch nps_uw_multibeam_sonar sonar_tank_blueview_p900_nps_multibeam_ray.launch n

番外篇 虚拟机中启动ROS中的Gazebo报错Error in REST request
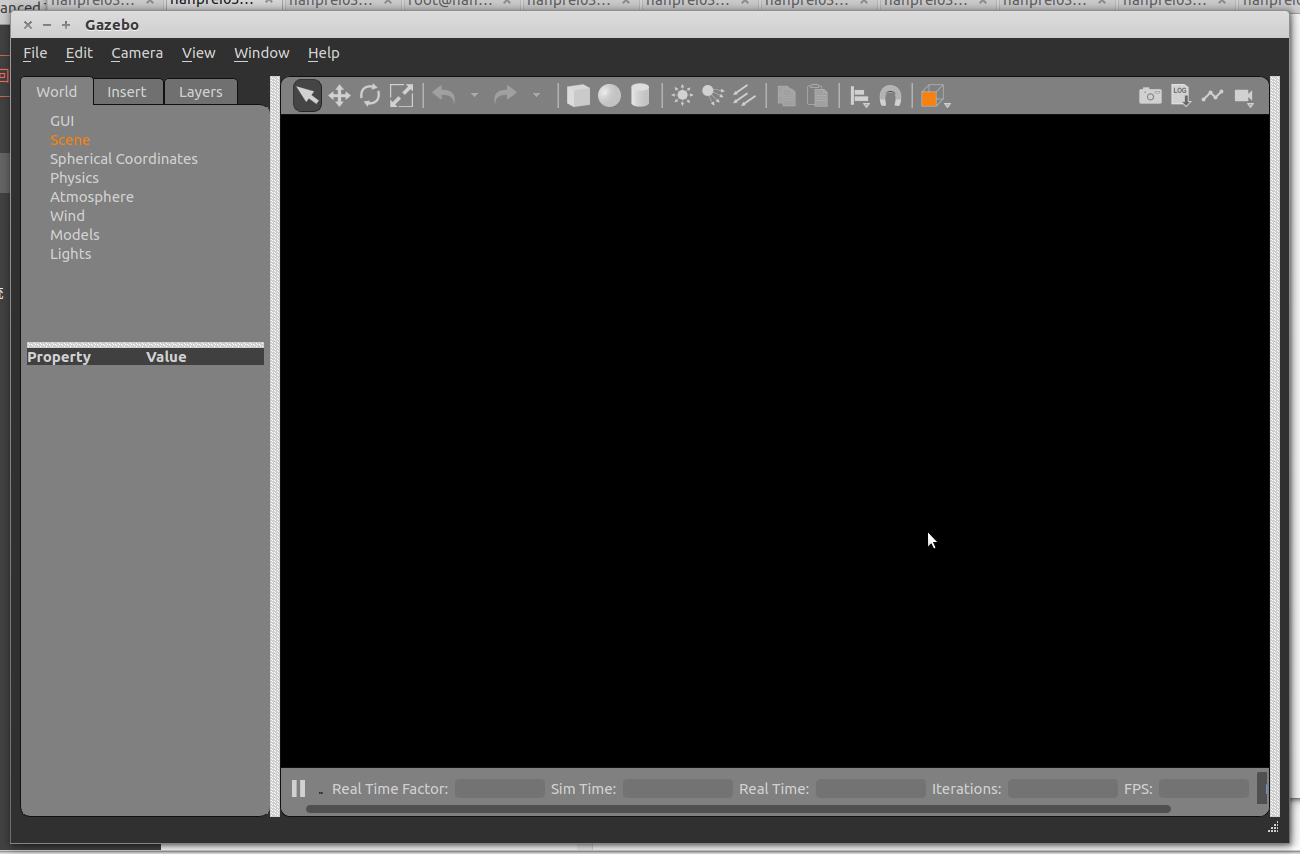
问题描述 Ubuntu18.04安装ROS以后,运行Gazebo竟然出现错误,Gazebo页面卡住黑屏,在终端出现Gazebo [Err] [REST.cc:205] Error in REST request [Err] [REST.cc:205] Error in REST requestlibcurl: (6) Could not resolve host: api.ignitionf

虚拟机运行Gazebo问题修复
转载自:http://blog.exbot.net/archives/3035 在虚拟机上运行Gazebo会遇到诸多问题,主要是显卡和硬件加速的问题,近期在虚拟机上安装了Ubuntu14.04 ROS(Indigo) Gazebo进行了测试,并把问题总结如下: ROS Indigo的Gazebo是2.2.3 版本。对于完全集成的ROS系统,我们建议使用2.x版本的Gazebo。如果需要使用其他

【Ubuntu20.04+Noetic】UR5e+Gazebo+Moveit
环境准备 创建工作空间 mkdir -p ur5e_ws/srccd ur5e_ws/src UR机械臂软件包 UR官方没更新最新的noetic的分支,因此安装melodic,并需要改动相关文件。 安装UR的模型配置包,包里面有UR模型文件,moveit配置等: cd ~/ur5e_ws/srcgit clone -b melodic-devel https://githu
Ubuntu 16.04 安装 Gazebo
Gazebo 是一款 3D 动态模拟器,能够准确有效地模拟复杂室内和室外环境中的机器人群体。虽然类似于游戏引擎,Gazebo 提供了更高保真度的物理模拟、一套传感器以及用户和程序接口。 Gazebo 的典型用途包括: 测试机器人算法,设计机器人,使用真实场景执行回归测试 Gazebo 的一些主要功能包括: 多个物理引擎,丰富的机器人模型和环境库,各种各样的传感器,方便的编程和图形界面 G
第 6 章 URDF、Gazebo与Rviz综合应用(自学二刷笔记)
重要参考: 课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ 讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 6.7.4 kinect信息仿真以及显示 通过 Gazebo 模拟kinect摄像头,并在 Rviz 中显示kinect摄像头数据。 实现流程: kinect摄像头仿
给自己的机器人部件安装单目摄像头并实现gazebo仿真功能
手术执行器添加摄像头 手术执行器文件夹surgical_new内容展示如何添加单目摄像头下载现成的机器人环境文件启动仿真环境 手术执行器文件夹surgical_new内容展示 进入src文件夹下选择进入vision_obliquity文件夹 选择launch 有两个可用gazebo中rviz展示的launch文件,robot.launch是添加有摄像头的手术执行器文件,ro
Gazebo中手动建立模型
control + B 打开建立墙体界面然后画墙体x和y的位置,点击右键暂停画图然后选择左侧贴图z由上图编辑界面的level1和level2决定,添加level2画第二层墙体control + x 退出,并选择save and exit保存模型 编辑完成后,选择file-save world as保存创建的世界 一个简单的障碍物场景就建立好啦~ 注意:这里有一个bug,无人机的位置其实
第 6 章 URDF集成Gazebo(自学二刷笔记)
重要参考: 课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ 讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 6.6 URDF集成Gazebo URDF 需要集成进 Rviz 或 Gazebo 才能显示可视化的机器人模型,前面已经介绍了URDF 与 Rviz 的集成,本节主要介绍
基于 parallels ubuntu 20.04 LTS (focal) 的ros+px4+gazebo 安装
系统环境: 主机环境macos 14.2.1 (23C71)、M1芯片Paralles商业版 19.1.0 (54729)ubuntuubuntu 20.04 LTS (focal)PX4v1.14.0ROS2foxy 虚拟机安装 1. 下载安装 parallels,参考评论; 2. 下载 ubuntu 镜像,使用 ubuntu 20.04 LTS (focal) arm 版本: ubu
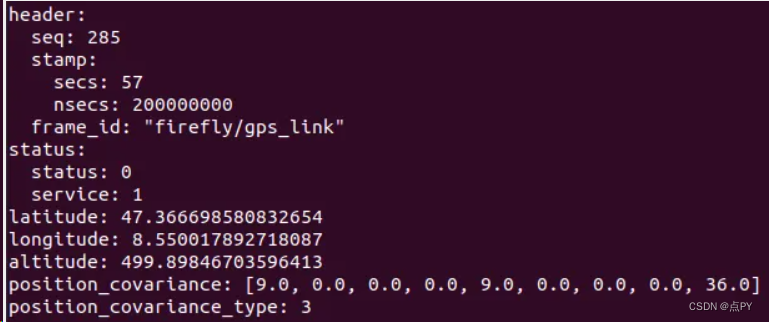
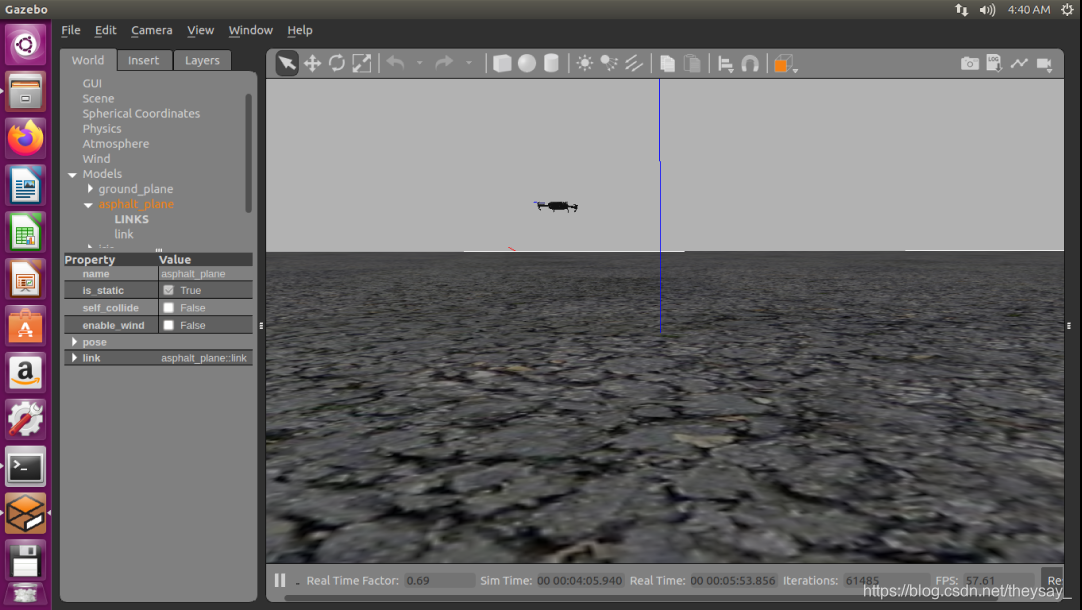
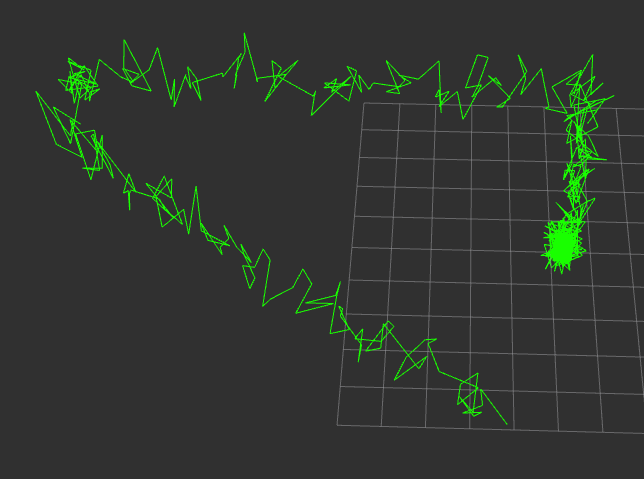
在GAZEBO中添加GPS模拟
文章目录 卫星导航能给机器人提供什么信息?gazebo测试环境 卫星导航能给机器人提供什么信息? 正常工作时,实际上可以提供机器人所需的所有定位信息,包括: 位置 姿态 速度等物理量 但是仅依靠卫星导航还不足以让机器人在室外完成自主导航任务,主要原因有一下几点: GNSS提供的定位精度不能满足要求,GNSS分多个细分种类,有些GNSS定位方法可以提供很高的精度,但要求物
gazebo抓取/轮式底盘仿真问题汇总
记录gazebo仿真中各种疑问 1、启动gazebo仿真环境后机器人不下落 <launch><arg name="world_name" default="worlds/empty.world"/><include file="$(find gazebo_ros)/launch/empty_world.launch" ><arg name="paused" value="true" /><ar
从虚拟机里安装Ubuntu到PX4的jmavsim/gazebo仿真
2020.2.21 一场瘟疫把很多人都困在了家里,闲来无聊,打算学学PX4,又因为手头没有pixhawk实物,没法进行半实物仿真(硬件在环仿真),只能进行虚拟仿真。 而虚拟仿真的jMAVsim只有四旋翼模型,gazebo只支持在Ubuntu里运行,所以还是打算装一个Ubuntu。之前装过Ubuntu的双系统,感觉浏览网页,下载文件什么的各种不方便,于是决定用虚拟机来装一个Ubuntu。 下面是一
地理坐标系与UTM坐标系转换并进行gazebo测试
地理坐标系与UTM坐标系转换并进行gazebo测试 经纬度到UTM坐标的转换gazebo测试环境 全球卫星导航系统(Global Navigation Satelite System,GNSS),简称卫星导航,是室外机器人定位的一个主要信息来源。 卫星导航能给机器人提供什么信息? 正常工作时,实际上可以提供机器人所需的所有定位信息,包括: 位置姿态速度等物理量 但是仅依靠
[gazebo]gzserver调用model的方式
Gazebo服务器(gzserver)调用模型的方式主要依赖于.world文件中的模型定义。在.world文件中,你可以通过<include>元素来添加模型,这告诉Gazebo需要加载哪些模型以及如何在仿真环境中放置这些模型。gzserver在加载.world文件时,会解析这些<include>元素,并从指定的路径或URI加载对应的模型。 以下是gzserver调用模型的基本步骤: 启动gzs
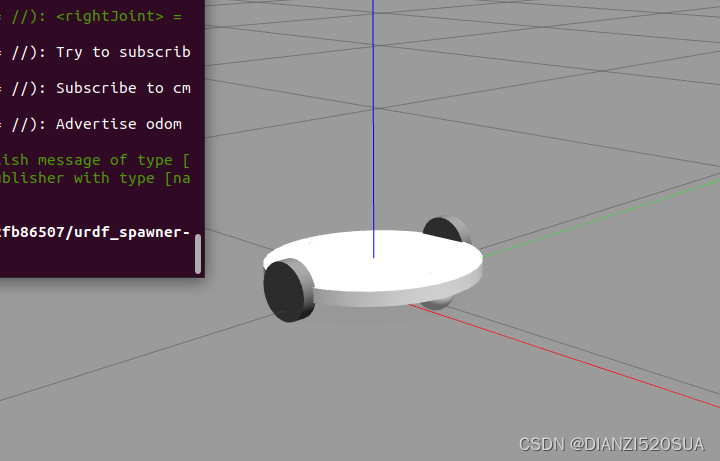
ros小问题之差速轮式机器人轮子不显示(rviz gazebo)
在rviz及gazebo练习差速轮式机器人时,很奇怪,只有个机器人的底板及底部的两个万向轮,如下图, 后来查看相关.xacro文件,里面是引用包含了轮子的xacro文件,只需传入不同的参数即可调用生成不同位置的轮子,精简了代码。找到定义轮子的xacro文件,在惯性那行增加xacro:即可,如下图所示,否则会找不到相关的值替换,自然不显示。 最终效果如下。 其他部件
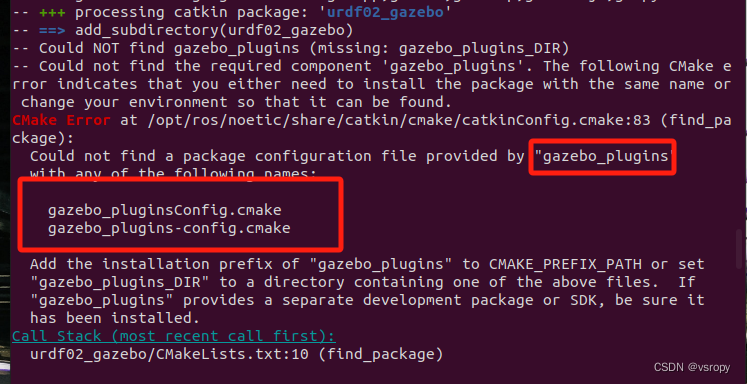
运行gazebo机器人模型没有cmd_vel话题
运行赵虚左教程代码出现上诉问题 roslaunch urdf02_gazebo demo03_env.launch 原因:缺少某个包 在工作空间catkin_make编译发现报错 解决: sudo apt-get install ros-noetic-gazebo-ros-pkgs ros-noetic-gazebo-ros-control 下载后再次运行launch文件