本文主要是介绍【声呐仿真】学习记录3.5-docker中Gazebo是否使用GPU?解决声呐图像黑屏,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【声呐仿真】学习记录3.5-docker中Gazebo是否使用GPU?解决声呐图像黑屏
- 🤡
- 打包镜像,重装驱动(失败)
- Xorg
- 重新配置DAVE环境(补充之前教程中的一些细节)
- 解决声呐图像黑屏问题
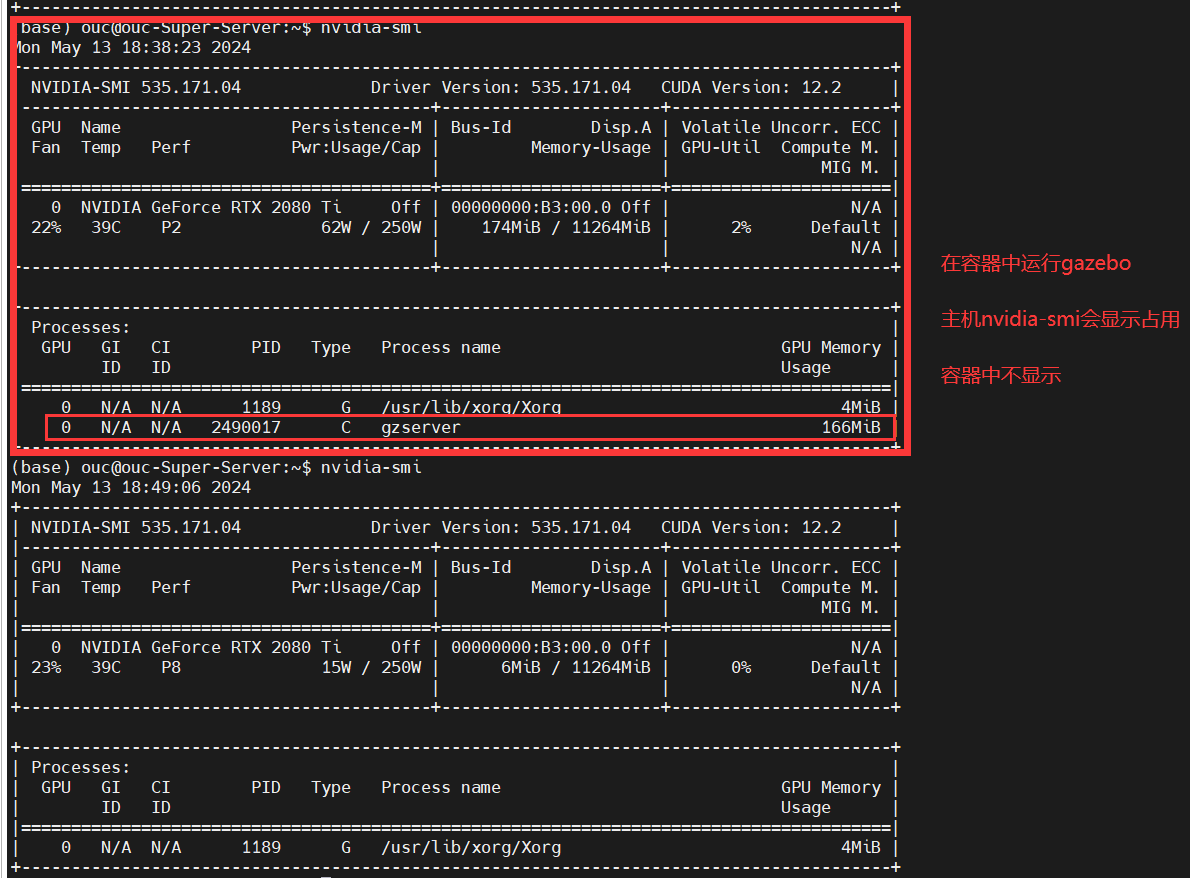
在容器中运行
roslaunch nps_uw_multibeam_sonar sonar_tank_blueview_p900_nps_multibeam_ray.launch
nvidia-smi 显示gazebo未使用GPU,但是在主机上看,是有占用的
以下是当时感觉gazebo太卡,以为是没有用显卡时的摸索过程
🤡
在学习过程中,发现gazebo、rviz太卡了,不像是用了显卡的样子(虽然实验室服务器是2080的显卡,我也不确定应该多快ORZ
然后就看了下显卡使用情况,好家伙,果然没用
nvidia-smi
使用 inxi -G 命令查看当前显卡驱动的状态,如果提示找不到命令请使用 sudo apt install inxi 安装
如果你的终端没有显示你的NVIDIA独显或者NVIDIA一行后的driver为nouveau并非nvidia,那么意味着你的独显并没有被识别或者使用了开源驱动nouveau导致独显并没有被激活。
Ubuntu 21.10 安装NVIDIA驱动并切换到独显模式-腾讯云开发者社区-腾讯云

我的甚至都不是nouveau
使用nvidia-setting、sudo prime-select nvidia等命令都显示没有GPU,所以准备重装一下
打包镜像,重装驱动(失败)
打包镜像,防止重装导致一些问题
docker ps
docker commit 容器id 镜像名
ubuntu系统gazebo卡顿问题解决—显卡消失问题_gazebo运行特别卡-
失败失败失败
sudo apt-get install nvidia-driver-535
apt --fix-broken install
Gazebo GPU加速【gzserver running in GPU】_gazebo怎么通过gpu-
官网下载run文件
sudo chmod a+x NVIDIA-Linux-x86_64-535.171.04.run
失败失败
sudo ./NVIDIA-Linux-x86_64-535.171.04.run --no-x-check --no-noveau-check
sudo prime-select nvidia
sudo reboot
Xorg
Ubuntu 20.04 不使用我的 GPU,即使正确加载了 NVIDIA 驱动程序 — Ubuntu 20.04 does not use my GPU even if NVIDIA drivers are loaded correctly
快速理解 X server, DISPLAY 与 X11 Forwarding_xserver
重新配置DAVE环境(补充之前教程中的一些细节)
感觉官方镜像应该是支持GPU的,准备重新配置一遍
配置环境真是让人心累,第三次配了,还是一堆bug
看着之前的教程,补充一些细节:
1.使用DAVE官方docker配置环境的,如果你的显卡支持cuda12.4,就不需要再配置cuda,镜像自带,只需要配置环境变量即可(学习记录0.5)
2.DAVE官方镜像配置方法(学习记录1.5),官方docker run语句中有rm,在退出容器的时候会删除容器,所以复制官方命令并删除rm参数,创建容器。
如果用的是公共服务器,个人建议修改相关参数-v /home/ouc/ros_dave:/data,不然在docker中操作一些文件会改变服务器上的文件,然后最好配置一下端口映射,这样在mobaxterm中可以用文件管理器,方便一点
docker run -it -p 50005:22 -v /home/ouc/ros_dave:/data --name dockwater_noetic_runtime --gpus all -v /dev:/dev --group-add video -e DISPLAY -e TERM -e QT_X11_NO_MITSHM=1 -e XAUTHORITY=/tmp/.docker74z95fw6.xauth -v /tmp/.docker74z95fw6.xauth:/tmp/.docker74z95fw6.xauth -v /tmp/.X11-unix:/tmp/.X11-unix -v /etc/localtime:/etc/localtime:ro 7c9399c1f9c1 /bin/bash
进入容器后,首先是要换源,不然很慢,然后下载代码
下载完源码后,在uuv_ws/src中使用catkin_init_workspace(命令不存在的话,source一下ros)
在uuv_ws中使用rosdep install --from-paths src --ignore-src -r -y自动安装相关依赖(有些安装不了的可以先不用管)
然后catkin build

3.运行一下多波束声呐的示例程序(学习记录2.5)
roslaunch nps_uw_multibeam_sonar sonar_tank_blueview_p900_nps_multibeam_ray.launch
注意当前的cuda版本nvcc --version
尝试nvidia-settings是否能打开
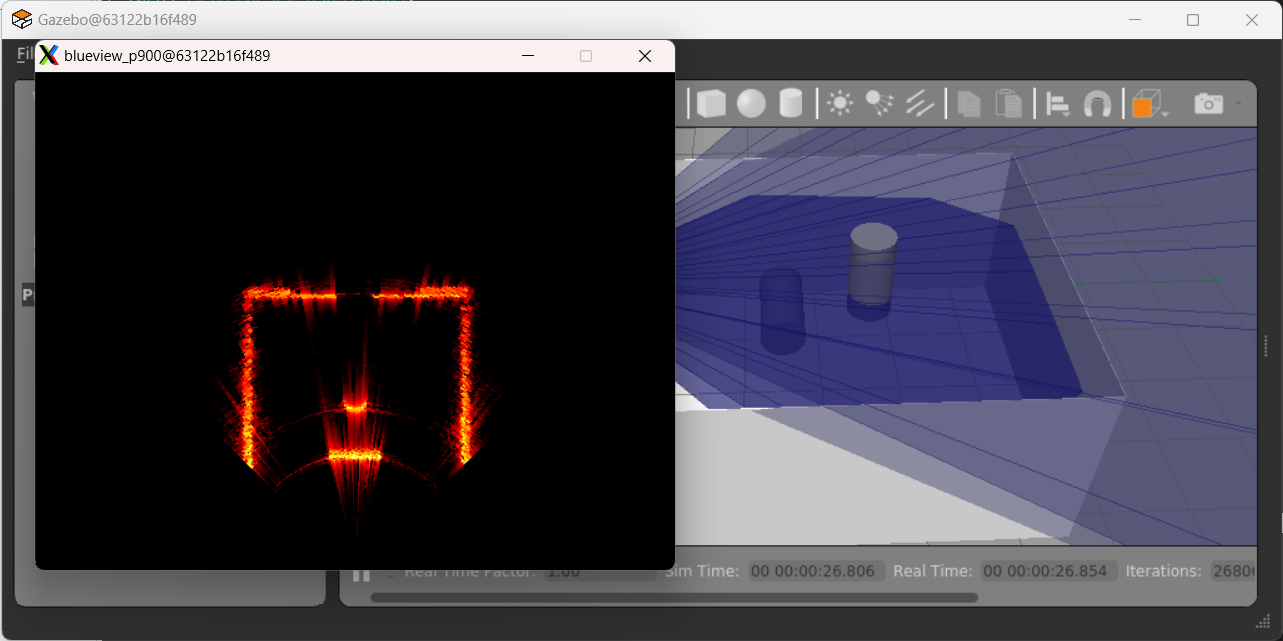
解决声呐图像黑屏问题
如果声呐图像显示全黑,个人猜测可能是cuda的原因,镜像自带cuda12.4,如果装新版本的时候,没有正确覆盖(看一下/usr/local里有几个cuda),且你自己的显卡不支持这个版本,就会不显示
安装新版cuda后,需要catkin clean后重新catkin build,不clean的话可能报错:

如果还是黑屏,尝试完全删除cuda12.4(locate cuda)
这篇关于【声呐仿真】学习记录3.5-docker中Gazebo是否使用GPU?解决声呐图像黑屏的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





