声呐专题
【声呐仿真】学习记录3.5-docker中Gazebo是否使用GPU?解决声呐图像黑屏
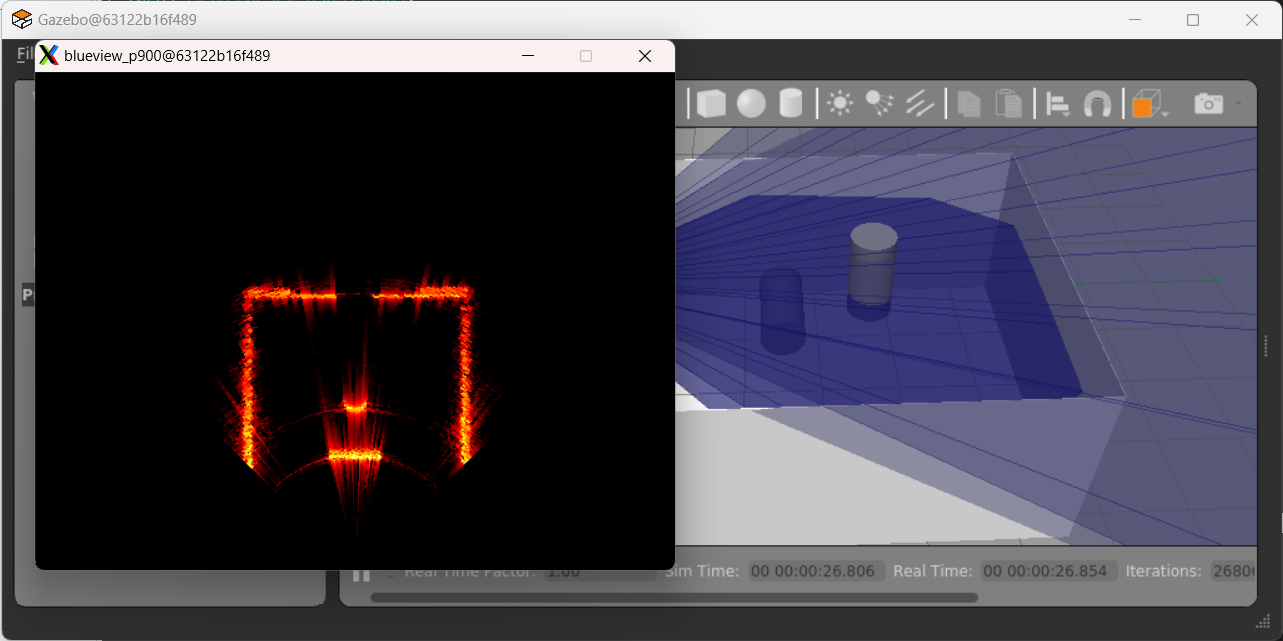
【声呐仿真】学习记录3.5-docker中Gazebo是否使用GPU?解决声呐图像黑屏 🤡打包镜像,重装驱动(失败)Xorg重新配置DAVE环境(补充之前教程中的一些细节)解决声呐图像黑屏问题 在容器中运行 roslaunch nps_uw_multibeam_sonar sonar_tank_blueview_p900_nps_multibeam_ray.launch n
【声呐仿真】学习记录2-运行ROV(带camera、sonar、dvl等传感器)例程
【声呐仿真】学习记录2-运行ROV(带camera、sonar、dvl等传感器)例程 前言第一阶段-学习Gazebo第二阶段-学习URDF、xacro第三阶段-寻找例程跑一个rexrov示例程序1.uuvsimulator quick_start2.能键盘控制的示例程序(失败)3.能键盘控制且运行成功的示例程序 第四阶段-配置Rviz 前言 本文以博主学习顺序记录 第一阶段-
【声呐仿真】学习记录1.5-使用docker配置dave(先看这个!)、解决一些问题
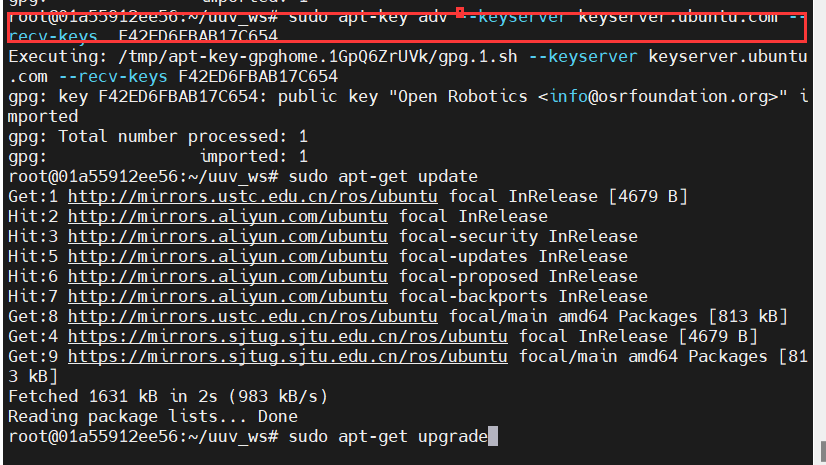
【声呐仿真】学习记录1.5-使用docker配置dave、解决一些问题 docker配置dave123 以下为未完全解决问题的随手记录,待日后解决再补充1.pcap、png解决,libusb未解决(不要修改libusb相关的)2.ISO C++3.换源4.自动安装相关依赖 docker配置dave 1 之前文章中手动配置的环境,在运行dave_demo的时候有报错,很长时间没

前视声呐目标识别定位(二)-目标识别定位模块
前视声呐目标识别定位(一)-基础知识 前视声呐目标识别定位(二)-目标识别定位模块 前视声呐目标识别定位(三)-部署至机器人 前视声呐目标识别定位(四)-代码解析之启动识别模块 前视声呐目标识别定位(五)-代码解析之修改声呐参数 前视声呐目标识别定位(六)-代码解析之目标截图并传输 前视声呐目标识别定位(七)-代码解析之录制数据包 前视声呐目标识别定位(八)-代码解析之各模块通
前视声呐目标识别定位(三)-部署至机器人
前视声呐目标识别定位(一)-基础知识 前视声呐目标识别定位(二)-目标识别定位模块 前视声呐目标识别定位(三)-部署至机器人 前视声呐目标识别定位(四)-代码解析之启动识别模块 前视声呐目标识别定位(五)-代码解析之修改声呐参数 前视声呐目标识别定位(六)-代码解析之目标截图并传输 前视声呐目标识别定位(七)-代码解析之录制数据包 前视声呐目标识别定位(八)-代码解析之各模块通信
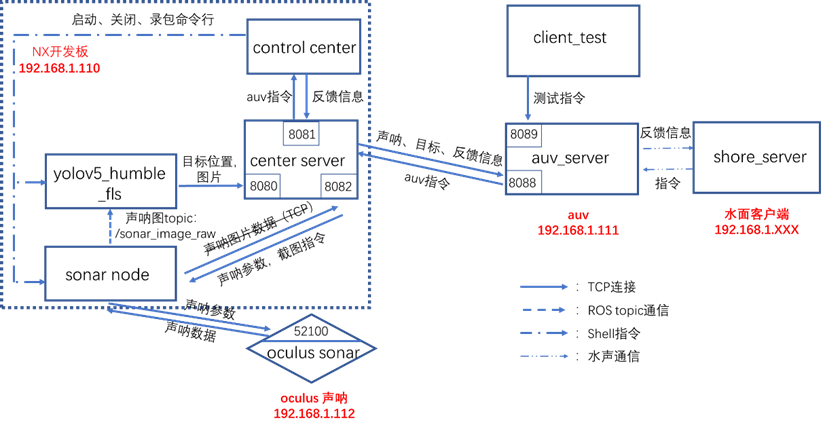
前视声呐目标识别定位(八)-代码解析之各模块通信
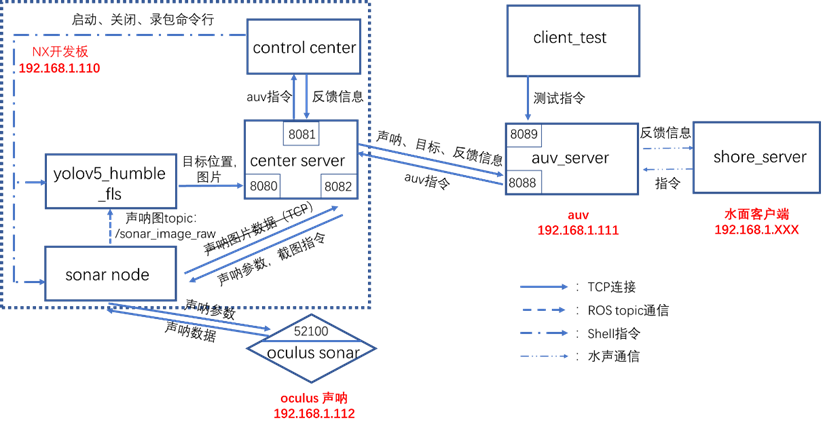
前视声呐目标识别定位(一)-基础知识 前视声呐目标识别定位(二)-目标识别定位模块 前视声呐目标识别定位(三)-部署至机器人 前视声呐目标识别定位(四)-代码解析之启动识别模块 前视声呐目标识别定位(五)-代码解析之修改声呐参数 前视声呐目标识别定位(六)-代码解析之目标截图并传输 前视声呐目标识别定位(七)-代码解析之录制数据包 结合结构图: 一、auv_serve

前视声呐目标识别定位(九)-声呐驱动
前视声呐目标识别定位(一)-基础知识 前视声呐目标识别定位(二)-目标识别定位模块 前视声呐目标识别定位(三)-部署至机器人 前视声呐目标识别定位(四)-代码解析之启动识别模块 前视声呐目标识别定位(五)-代码解析之修改声呐参数 前视声呐目标识别定位(六)-代码解析之目标截图并传输 前视声呐目标识别定位(七)-代码解析之录制数据包 前视声呐目标识别定位(八)-代码解析之各

自制合成孔径雷达(7) 声卡实现测速声呐
用SDR有时候搭建起来比较麻烦,而且无线电波传播速度太快,造成同样时间对应的距离很大,分辨率比较低,因此接下来想用声波来研究这些理论,只需要电脑内建声卡就能玩,精度还比无线电波高,只是可能距离上没法做到无线电那么远。 视频: gnuradio实现测速声呐_哔哩哔哩_bilibili 这是我用的流图,原理和SDR的测速差不多,也是靠多普勒频移实现的,只不过声卡信号都是实