本文主要是介绍【声呐仿真】学习记录1.5-使用docker配置dave(先看这个!)、解决一些问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【声呐仿真】学习记录1.5-使用docker配置dave、解决一些问题
- docker配置dave
- 1
- 2
- 3
- 以下为未完全解决问题的随手记录,待日后解决再补充
- 1.pcap、png解决,libusb未解决(不要修改libusb相关的)
- 2.ISO C++
- 3.换源
- 4.自动安装相关依赖
docker配置dave
1
之前文章中手动配置的环境,在运行dave_demo的时候有报错,很长时间没能解决
所以又试了试官方提供的docker版本,可以正常运行demo
所以建议直接用docker配,除了最开始拉取docker镜像部分有差别,其它基本一样
步骤参考Docker环境|DAVE项目 — Docker Environment | Project DAVE
2
在执行./run.bash -c dockwater:noetic时,如果报错:在运行docker run …时,docker 未找到
关闭ssh,重新连接
然后使用以下命令创建容器(不要复制我的,可能会有信息不一样,复制你报错里的命令。然后可以参照我的,添加一下你需要的,命令介绍在之前的文章里有,dave官方的我也看不懂):
注意:可能需要删除官方命令中的–rm,我有这个参数的话就会失败(报错docker未找到)
docker run -it -p 50004:22 -v /home/ouc/ros_dave:/home/ouc --name dockwater_noetic_runtime --gpus all -v /dev:/dev -e DISPLAY -e TERM -e XAUTHORITY=/tmp/.dockerpznw0d90.xauth -v /tmp/.dockerpznw0d90.xauth:/tmp/.dockerpznw0d90.xauth -v /tmp/.X11-unix:/tmp/.X11-unix -v /etc/localtime:/etc/localtime:ro -e NVIDIA_DRIVER_CAPABILITIES=compute,utility -e NVIDIA_VISIBLE_DEVICES=all 869c5ad477cb /bin/bash
3
创建完容器后,就按照我之前的文章,配置可视化、配置cuda、下载代码编译运行,选配ssh远程
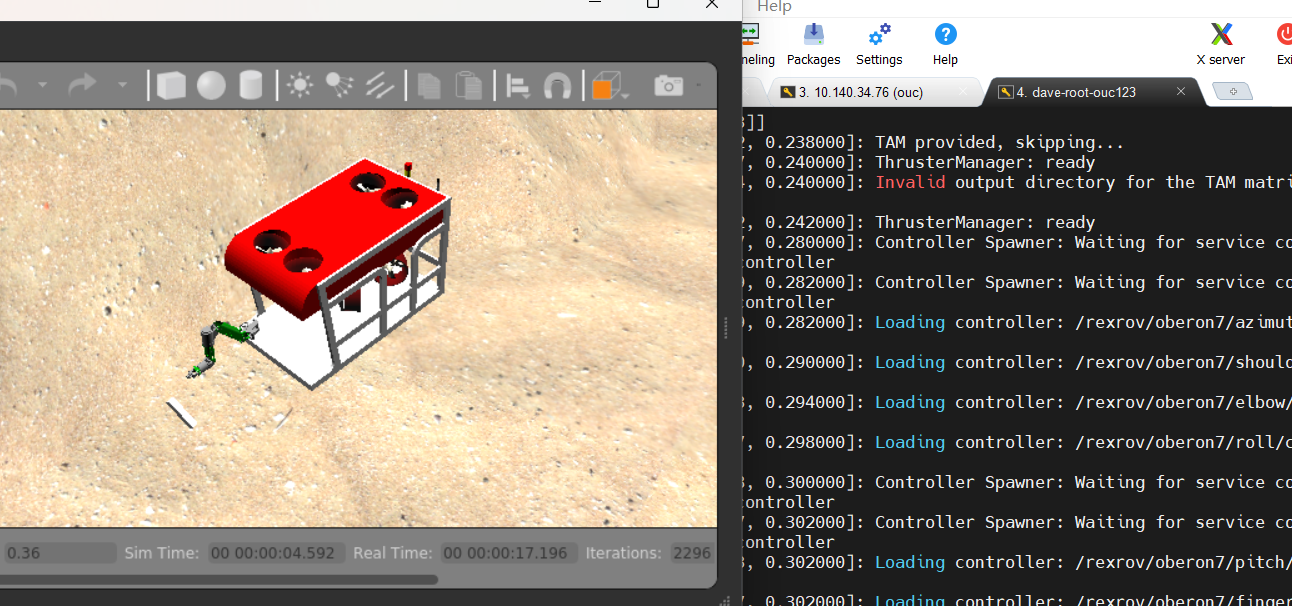
运行demo结果如下:
roslaunch dave_demo_launch dave_demo.launch
以下为未完全解决问题的随手记录,待日后解决再补充
1.pcap、png解决,libusb未解决(不要修改libusb相关的)

WARNING ** io features related to openni2 pcap png will be disabled_io features related to openni will be disabled-
经查,png和usb系统都有:
locate libpng | grep cmake
locate libusb

只需安装pcap、配置:
sudo apt-get install libpcap-dev
sudo gedit `locate PCLConfig.cmake`
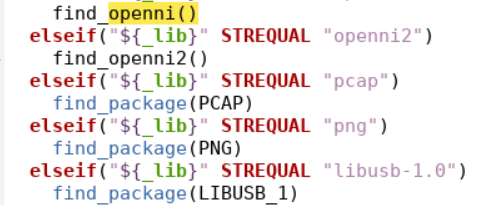
搜索openni(),在下面添加:
elseif("${_lib}" STREQUAL "png")find_package(PNG)elseif("${_lib}" STREQUAL "pcap")find_package(PCAP) elseif("${_lib}" STREQUAL "libusb-1.0")find_package(LIBUSB_1)
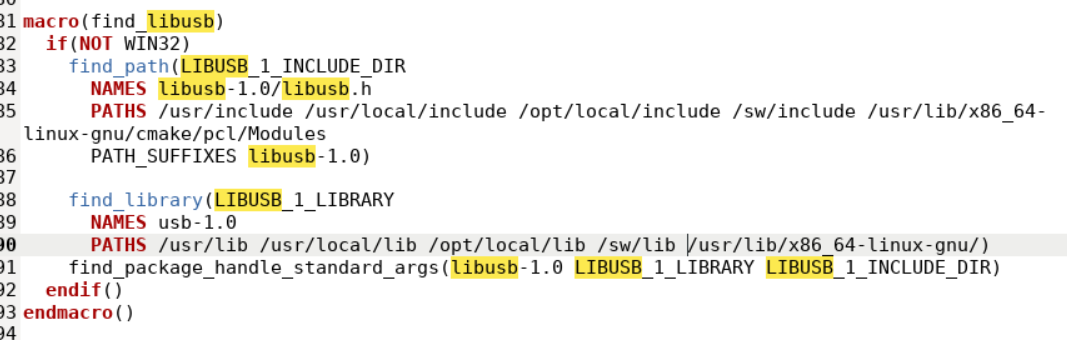
cp `locate libusb | grep cmake` /usr/share/cmake-3.16/Modules/FindLIBUSB_1.cmake
sudo gedit /usr/share/cmake-3.16/Modules/FindPCAP.cmake
# - Try to find libpcap include dirs and libraries
#
# Usage of this module as follows:
#
# find_package(PCAP)
#
# Variables used by this module, they can change the default behaviour and need
# to be set before calling find_package:
#
# PCAP_ROOT_DIR Set this variable to the root installation of
# libpcap if the module has problems finding the
# proper installation path.
#
# Variables defined by this module:
#
# PCAP_FOUND System has libpcap, include and library dirs found
# PCAP_INCLUDE_DIR The libpcap include directories.
# PCAP_LIBRARY The libpcap library (possibly includes a thread
# library e.g. required by pf_ring's libpcap)
# HAVE_PF_RING If a found version of libpcap supports PF_RING
# HAVE_PCAP_IMMEDIATE_MODE If the version of libpcap found supports immediate modefind_path(PCAP_ROOT_DIRNAMES include/pcap.h
)find_path(PCAP_INCLUDE_DIRNAMES pcap.hHINTS ${PCAP_ROOT_DIR}/include
)set (HINT_DIR ${PCAP_ROOT_DIR}/lib)# On x64 windows, we should look also for the .lib at /lib/x64/
# as this is the default path for the WinPcap developer's pack
if (${CMAKE_SIZEOF_VOID_P} EQUAL 8 AND WIN32)set (HINT_DIR ${PCAP_ROOT_DIR}/lib/x64/ ${HINT_DIR})
endif ()find_library(PCAP_LIBRARYNAMES pcap wpcapHINTS ${HINT_DIR}
)include(FindPackageHandleStandardArgs)
find_package_handle_standard_args(PCAP DEFAULT_MSGPCAP_LIBRARYPCAP_INCLUDE_DIR
)include(CheckCXXSourceCompiles)
set(CMAKE_REQUIRED_LIBRARIES ${PCAP_LIBRARY})
check_cxx_source_compiles("int main() { return 0; }" PCAP_LINKS_SOLO)
set(CMAKE_REQUIRED_LIBRARIES)# check if linking against libpcap also needs to link against a thread library
if (NOT PCAP_LINKS_SOLO)find_package(Threads)if (THREADS_FOUND)set(CMAKE_REQUIRED_LIBRARIES ${PCAP_LIBRARY} ${CMAKE_THREAD_LIBS_INIT})check_cxx_source_compiles("int main() { return 0; }" PCAP_NEEDS_THREADS)set(CMAKE_REQUIRED_LIBRARIES)endif (THREADS_FOUND)if (THREADS_FOUND AND PCAP_NEEDS_THREADS)set(_tmp ${PCAP_LIBRARY} ${CMAKE_THREAD_LIBS_INIT})list(REMOVE_DUPLICATES _tmp)set(PCAP_LIBRARY ${_tmp}CACHE STRING "Libraries needed to link against libpcap" FORCE)else (THREADS_FOUND AND PCAP_NEEDS_THREADS)message(FATAL_ERROR "Couldn't determine how to link against libpcap")endif (THREADS_FOUND AND PCAP_NEEDS_THREADS)
endif (NOT PCAP_LINKS_SOLO)include(CheckFunctionExists)
set(CMAKE_REQUIRED_LIBRARIES ${PCAP_LIBRARY})
check_function_exists(pcap_get_pfring_id HAVE_PF_RING)
check_function_exists(pcap_set_immediate_mode HAVE_PCAP_IMMEDIATE_MODE)
check_function_exists(pcap_set_tstamp_precision HAVE_PCAP_TIMESTAMP_PRECISION)
set(CMAKE_REQUIRED_LIBRARIES)mark_as_advanced(PCAP_ROOT_DIRPCAP_INCLUDE_DIRPCAP_LIBRARY
)
2.ISO C++

不知道做了什么,突然成功了:
3.换源
ROS换源(除了清华之外的ROS源)-
Ubuntu22.04 解决 E: 无法定位软件包 yum_e: 无法定位软件包 libqt6opengl6-dev-
以上没解决
sudo cp -ra /etc/apt/sources.list /etc/apt/sources.list.bak
sudo vi /etc/apt/sources.listdeb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiversedeb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiversedeb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiversedeb http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiversedeb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse保存退出
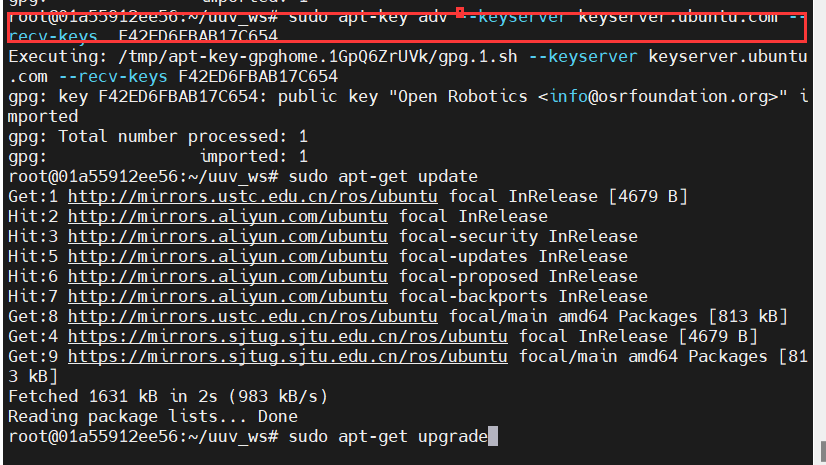
sudo apt-get update
sudo apt-get upgrade
遇到问题:
解决GPG 错误由于没有公钥,无法验证下列签名-
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys xxx
解决后好了
4.自动安装相关依赖
rosdep install --from-paths src --ignore-src -r -y
这篇关于【声呐仿真】学习记录1.5-使用docker配置dave(先看这个!)、解决一些问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




