本文主要是介绍从虚拟机里安装Ubuntu到PX4的jmavsim/gazebo仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
2020.2.21
一场瘟疫把很多人都困在了家里,闲来无聊,打算学学PX4,又因为手头没有pixhawk实物,没法进行半实物仿真(硬件在环仿真),只能进行虚拟仿真。
而虚拟仿真的jMAVsim只有四旋翼模型,gazebo只支持在Ubuntu里运行,所以还是打算装一个Ubuntu。之前装过Ubuntu的双系统,感觉浏览网页,下载文件什么的各种不方便,于是决定用虚拟机来装一个Ubuntu。
下面是一些踩坑过程,记录下来方便以后查看。
安装ubuntu
先上网搜了下Ubuntu,发现有个win10自带的Ubuntu子系统,以为会比虚拟机好用一些,不自量力的想试一下,结果图形界面一直搞不出来,然后就果断放弃了。后来又百度了一下,果然没搜到有人在win10自带的linux子系统下 搭建PX4编译环境,庆幸自己及时放弃了。
所以还是回到虚拟机
先下载VMware(我下的是15.5),安装
然后网上找一个ubuntu的iso镜像,可以在国内源或者官网上下。我是在网易镜像站上下载的ubuntu16.04
链接:http://mirrors.163.com/ubuntu-releases/
然后安装ubuntu,这部分在网上有各种教程,就不细说了。。
我稀里糊涂用了它推荐的分区,没自定义分区(不过好像区别也不大,就一点,后面再说)
安装了之后,先把ubuntu的源换成国内的,这样下载速度会快一些。
我换的是阿里云的源,照着 https://developer.aliyun.com/mirror/ubuntu?spm=a2c6h.13651102.0.0.3e221b113jL5RS 一通操作,就完事了。
简单来说就是:
先打开这个文件(打开之前可以先备份) /etc/apt/sources.list
sudo gedit /etc/apt/sources.list
然后全删掉,换成
deb http://mirrors.aliyun.com/ubuntu/ xenial main
deb-src http://mirrors.aliyun.com/ubuntu/ xenial maindeb http://mirrors.aliyun.com/ubuntu/ xenial-updates main
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-updates maindeb http://mirrors.aliyun.com/ubuntu/ xenial universe
deb-src http://mirrors.aliyun.com/ubuntu/ xenial universe
deb http://mirrors.aliyun.com/ubuntu/ xenial-updates universe
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-updates universedeb http://mirrors.aliyun.com/ubuntu/ xenial-security main
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-security main
deb http://mirrors.aliyun.com/ubuntu/ xenial-security universe
deb-src http://mirrors.aliyun.com/ubuntu/ xenial-security universe
(其实就是把网址全换了)
然后保存关掉就行了
搭建PX4的编译环境
官网教程:
https://dev.px4.io/v1.9.0/en/setup/dev_env_linux.html#jmavsimgazebo-simulation
在搭建环境之前先把用户添加到用户组,这一步如果不做会产生很多权限问题。还有需要注意的是不要用sudo去修复权限问题。。。
sudo usermod -a -G dialout $USER
注销账户然后重新登录才能生效
接下来官网上给了一个看起来非常省事的方法,就是直接运行.sh文件里的代码批量安装(但是中间出错了也挺麻烦)
主要是下面这几个
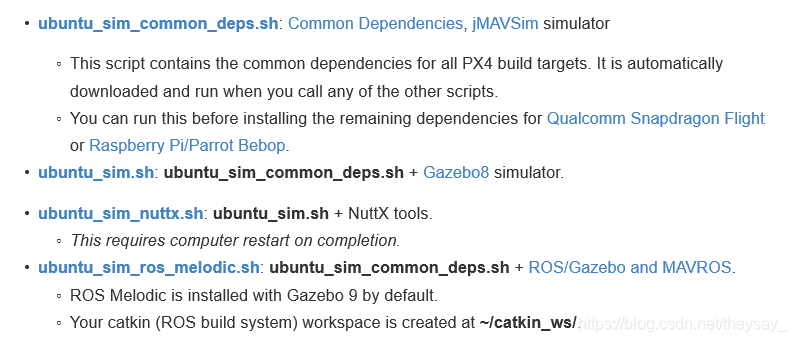
运行的话就像这样⬇
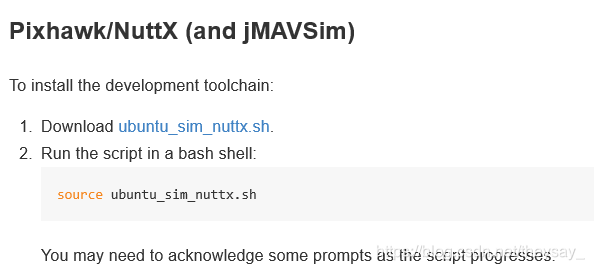
这过程中遇到了两个问题:
这些.sh文件运行起来是这样的:
运行后一个的时候会先下载前一个,先把前面的安装上,再把多出来的包安装上。
我一开始想直接运行ubuntu_sim_nuttx,但是运行的时候无法连接网站,terminal直接崩溃,所以我就直接把这几个文件下载下来,先运行ubuntu_sim_common_deps.sh,然后把后面几个文件的后面几行代码复制到terminal里运行。
第二个问题是提示 python2.7 过期,(据说)ubuntu16.04 自带的是python2,所以运行.sh文件时安装的是python2.7以及相应的支持包,运行过程中会报很多错
所以需要再独立安装一下 python3,之后再安装相应的各种支持包,或者直接编译,根据报错信息缺啥装啥就行了。
这两个问题弄完之后,其他的问题可能就是arm-none-eabi工具链的问题,也是缺啥装啥就行。
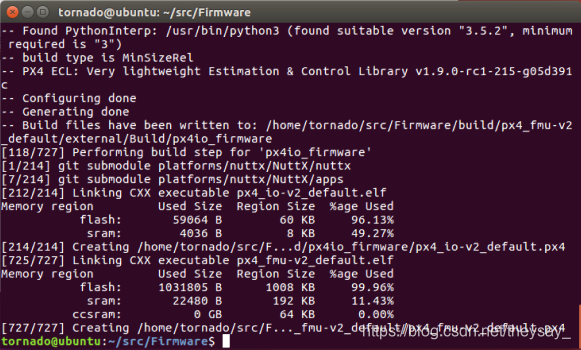
接下来编译一下固件试试
在 ~/src/Firmware 文件夹下运行
make px4_fmu-v2_default
编译之前可以先make help一下,看看有哪些make命令
我编译成功之后是这样
下一步就是在jMAVsim仿真一下
在 ~/src/Firmware 文件夹下
make px4_sitl jmavsim
遇到了错误:
com.jogamp.opengl.GLException: X11GLXDrawableFactory - Could not initialize shared resources
for X11GraphicsDevice[type .x11, connection :0, unitID 0, handle 0x0, owner false,
ResourceToolkitLock[obj 0x64632a71, isOwner false, <22939c47, 5577a0b5>
[count 0, qsz 0, owner <NULL>]]]
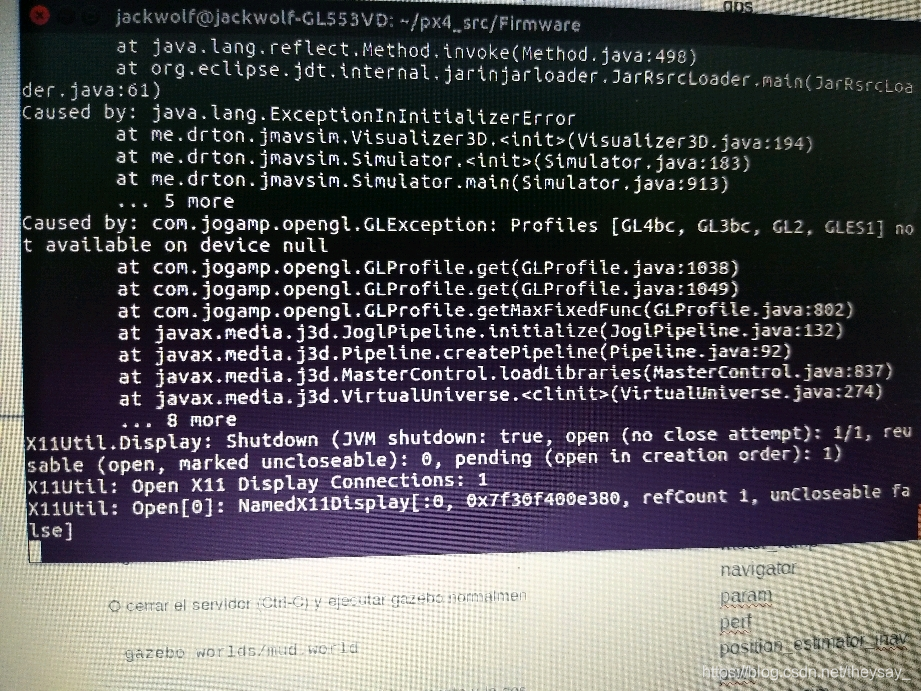
解决办法:
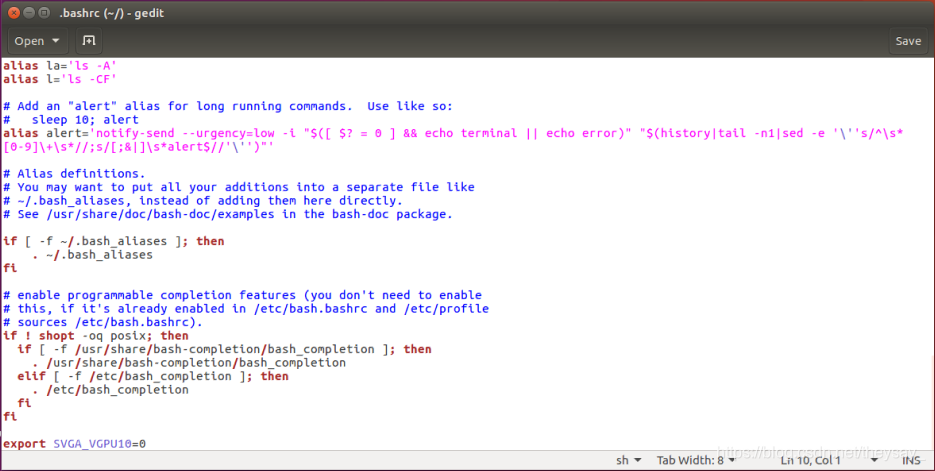
在.bashrc文件中设置环境变量“export SVGA_VGPU10=0”
sudo gedit ~/.bashrc
在最后一行添加“export SVGA_VGPU10=0”
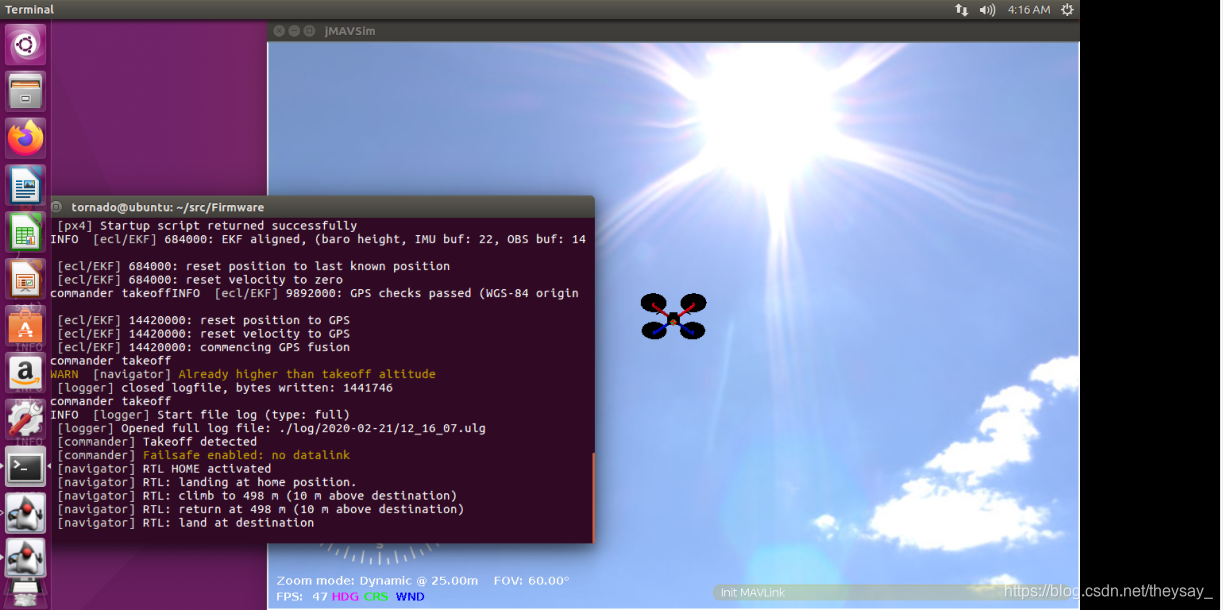
然后这次终于通过编译了,起飞试一下
我以为会有一个新的px4命令行窗口,其实就是在terminal的窗口继续输入指令
commander takeoff
下面继续弄gazebo仿真
在 ~/src/Firmware 文件夹下
make px4_sitl gazebo
这次在编译的时候我遇到的问题是:
virtual memory exhausted: Cannot allocate memory
看起来是内存不够用了,不过内存不够可以用swap来凑,可以看一下内存和swap空间
free -m
会显示这个
total used free shared buff/cache available
Mem: 2943 648 764 12 1530 1956
Swap: 974 0 974单位是M,也就是说内存大概是3g,swap大概是1g
这时候没自定义安装Ubuntu的问题就出来了,我的swap只有1G,内存这种东西可以在虚拟机外面直接设置,但是swap需要在Ubuntu里扩充。
这里我用的是增加swap文件的方法(而不是扩充分区)
swap扩容文件的添加与删除过程如下:
- 添加swap文件进行扩容的方法
首先创建一个swap文件夹,并在里面再创建一个文件swapfile
cd /
sudo mkdir swap
cd swap
sudo dd if=/dev/zero of=swapfile bs=1M count=2048
swap容量=bs*count,也就是说上一条命令创建了2G的swap文件
接着把生成的文件转化成swap文件
sudo mkswap swapfile
接着激活swap空间
sudo swapon swapfile
然后设置成开机自动挂载
先备份文件 /etc/fstab:
sudo cp /etc/fstab /etc/fstab.bak
然后将swapfile路径内容写入到/etc/fstab文件当中,在最后一行添加
/swap/swapfile none swap sw 0 0
这时候再用free -m 命令看一下swap空间
total used free shared buff/cache available
Mem: 2943 630 1699 9 614 2039
Swap: 3022 0 3022
可以看到swap变成了3G
- 这里也介绍一下删除swap空间的方法
首先先停用swap文件
sudo swapoff -v /swapfile
然后打开fstab文件修改
sudo gedit /etc/fstab
删除之前添加的那一行
然后再删除swap文件就行了
sudo rm /swap/swapfile
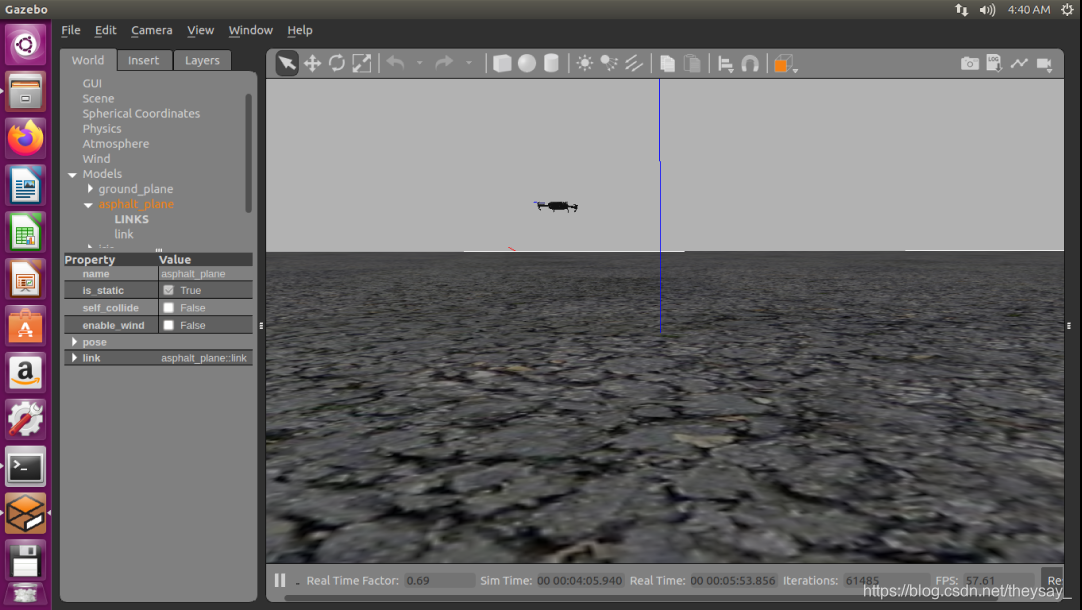
扩充了swap空间之后,终于编译通过,gazebo也大功告成!
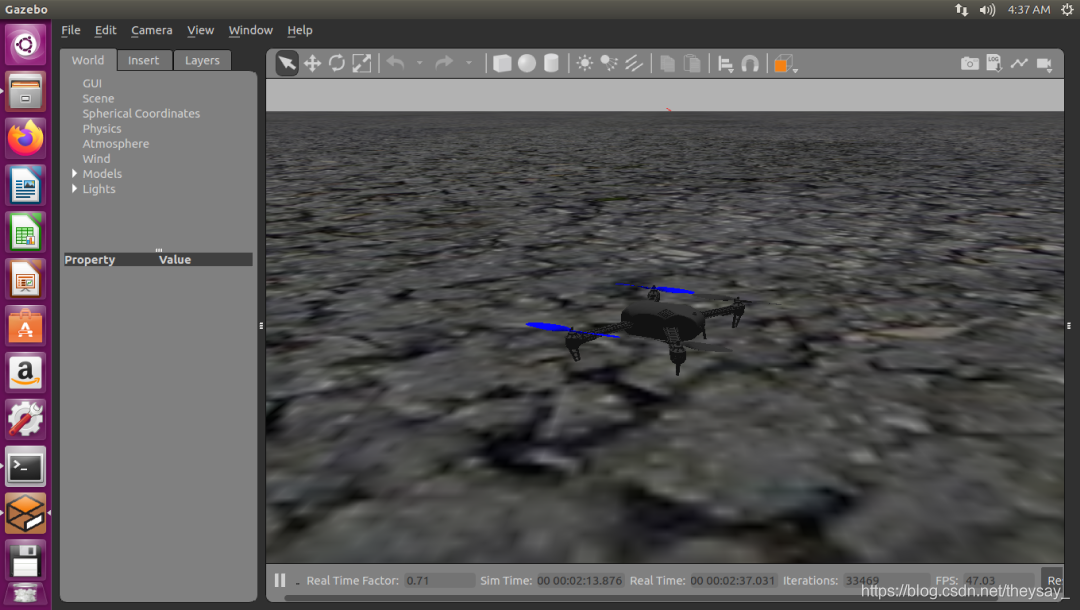
同样是起飞试一下:
commander takeoff
暂时完结!!
目前还是小白一个,接下来利用仿真来调试程序的部分争取也继续上传。
接下来的计划是用Windows中的Matlab修改并生成px4代码,然后再在Ubuntu里进行虚拟仿真
这篇关于从虚拟机里安装Ubuntu到PX4的jmavsim/gazebo仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








