本文主要是介绍地理坐标系与UTM坐标系转换并进行gazebo测试,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
地理坐标系与UTM坐标系转换并进行gazebo测试
- 经纬度到UTM坐标的转换
- gazebo测试环境

全球卫星导航系统(Global Navigation Satelite System,GNSS),简称卫星导航,是室外机器人定位的一个主要信息来源。
卫星导航能给机器人提供什么信息?
正常工作时,实际上可以提供机器人所需的所有定位信息,包括:
- 位置
- 姿态
- 速度等物理量
但是仅依靠卫星导航还不足以让机器人在室外完成自主导航任务,主要原因有一下几点:
- GNSS提供的定位精度不能满足要求,GNSS分多个细分种类,有些GNSS定位方法可以提供很高的精度,但要求物体必须静止一段时间(通常十分钟以上);也有的方法可以提供较好的动态物体定位,但需要事先架设一个或多个基站。
- GNSS的定位频率不能满足要求,一般在5-10hz
- GNSS定位可用性存在问题,不能够全天候、全场地使用,稳定性与场景、结构、物体的遮挡关系,甚至和天气有关。
GNSS定位原理:
GNSS通过测量自身与地球周围各卫星的距离来确定自身位置,与卫星的距离主要通过测量时间间隔来确定。一个卫星信号从卫星上发出时,带有一个发送时间,而GNSS接收机接收到它时,有一个接收时间,通过比较时间间隔,就能估算各卫星离我们的距离。GNSS本质上可以看成一种高精度的授时系统。

经纬度到UTM坐标的转换
一般的单点GNSS或者RTK都会输出接收器测量到的经纬度。
下面通过程序将测量到的经纬度转换为米制的UTM坐标。
有的RTK带有双天线,在测量经纬度的同时,还可以输出方向角,如果不考虑机器人的俯仰和横滚,将它们视为零。 即可以将双天线RTK输出的四自由度坐标,在假设机器人的俯仰和横滚为零的前提下,可以把RTK输出视为六自由度的位置变换,即SE(3)的位姿。
经纬度转UTM的算法比较复杂和琐碎,使用一个开源的转换方法来实现这部分内容。
gazebo测试环境
在飞机上添加一个GPS模块
<!-- Mount an Default GPS. --><xacro:default_gps namespace="${namespace}" parent_link="${namespace}/base_link" />
默认的GPS 用的 rotors_simulator的 gps 插件 ,可以设置水平、垂直位置精度,水平垂直速度精度
<xacro:macro name="default_gps" params="namespace parent_link"><!-- Default GPS. --><xacro:gps_plugin_macronamespace="${namespace}"gps_suffix=""parent_link="${parent_link}"gps_topic="gps"ground_speed_topic="ground_speed"mass_gps_sensor="0.015"horizontal_pos_std_dev="3.0"vertical_pos_std_dev="6.0"horizontal_vel_std_dev="0.1"vertical_vel_std_dev="0.1"><inertia ixx="0.00001" ixy="0.0" ixz="0.0" iyy="0.00001" iyz="0.0" izz="0.00001" /><origin xyz="0 0 0" rpy="0 0 0" /></xacro:gps_plugin_macro></xacro:macro>
设置好后,启动gazebo
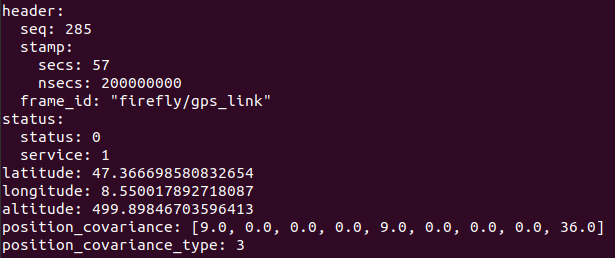
打印gps发出的数据如下
header:
seq: 285
stamp:
secs: 57
nsecs: 200000000
frame_id: “firefly/gps_link”
status:
status: 0
service: 1
latitude: 47.366698580832654
longitude: 8.550017892718087
altitude: 499.89846703596413
position_covariance: [9.0, 0.0, 0.0, 0.0, 9.0, 0.0, 0.0, 0.0, 36.0]
position_covariance_type: 3
经纬度转UTM坐标
bool LatLon2UTM(const Vec2d& latlon, UTMCoordinate& utm_coor) {long zone = 0;char char_north = 0;long ret = Convert_Geodetic_To_UTM(latlon[0] * math::kDEG2RAD, latlon[1] * math::kDEG2RAD, &zone, &char_north,&utm_coor.xy_[0], &utm_coor.xy_[1]);utm_coor.zone_ = (int)zone;utm_coor.north_ = char_north == 'N';return ret == 0;
}
输入 向量 Vec2d 就是 Eigen::Vector2d 的经纬度值
输出 UTMCoordinate格式的 utm数据,UTMCoordinate格式定义如下:
/// UTM 坐标
struct UTMCoordinate {UTMCoordinate() = default;explicit UTMCoordinate(int zone, const Vec2d& xy = Vec2d::Zero(), bool north = true): zone_(zone), xy_(xy), north_(north) {}int zone_ = 0; // utm 区域Vec2d xy_ = Vec2d::Zero(); // utm xydouble z_ = 0; // z 高度(直接来自于gps)bool north_ = true; // 是否在北半球
};
其中调用了 Convert_Geodetic_To_UTM 函数是调用的 utm_convert库中的函数
参数解释如下
* Latitude : Latitude in radians (input)* Longitude : Longitude in radians (input)* Zone : UTM zone (output)* Hemisphere : North or South hemisphere (output)* Easting : Easting (X) in meters (output)* Northing : Northing (Y) in meters (output)
输出结果
std::cout<< "utm zone: " <<utm_coor.zone_<<std::endl;std::cout<< "utm x: " <<utm_coor.xy_[0]<<std::endl;std::cout<< "utm y: " <<utm_coor.xy_[1]<<std::endl;
其中的一帧转换值
utm zone: 32
utm x: 466024
utm y: 5.24601e+06
也就是说
latitude: 47.366698580832654
longitude: 8.550017892718087
转到UTM坐标系约为
zone: 32
x: 466024
y: 5.24601e+06
可以看到x 和 y的数值很大,不好进行判断,一般把获取第一帧数据位置标为零点,也就是后面的数据都减去起始位置
代码如下:
sensor_msgs::NavSatFix Gps = *Gps_msg;Vec2d gps_latlon;UTMCoordinate utm_coor;static bool first_gnss_set = false;static Vec2d origin = Vec2d::Zero();gps_latlon[0] = Gps.latitude;gps_latlon[1] = Gps.longitude;LatLon2UTM(gps_latlon,utm_coor);if (!first_gnss_set) {origin << utm_coor.xy_[0],utm_coor.xy_[1];first_gnss_set = true;}utm_coor.xy_ = utm_coor.xy_ - origin;
上面是机器人上最简单的获得卫星导航位置的情况,该情况上默认导航的GPS或RTK安装在机器人的正中心位置。
下面介绍复杂一些的情况:GPS的位置与机器人中心有偏差。
还有另一种情况,RTK可以输出双天线的角度,双天线也不与机器人前向一致。
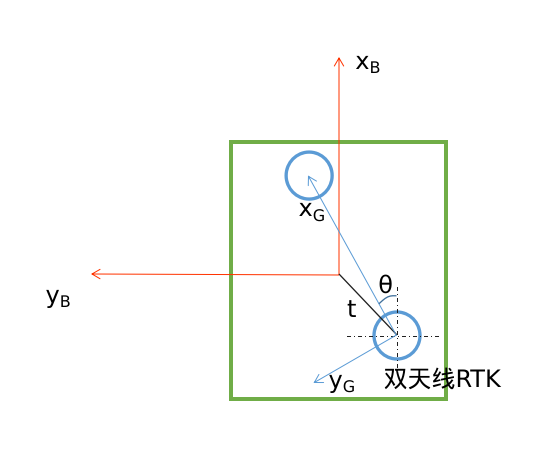
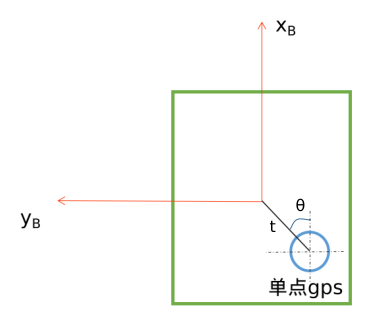
上面的图中,红色坐标代表机器人坐标系,蓝色代表GNSS坐标系。
双天线RTK输出的UTM坐标和方向角的读数,可视为 T W G T_{WG} TWG,其中W代表世界坐标系,G代表GNSS坐标系。
机器人需要的导航定位数据为 T W B T_{WB} TWB,其中B为机器人坐标系。
为了将RTK输出的 T W G T_{WG} TWG转为机器人需要的导航定位数据为 T W B T_{WB} TWB,则需进行GNSS接收器与机器人中心的外参,来组成 T B G T_{BG} TBG。
在参数标定中,可以规定如下:
指定安装偏移量 t t t,为 O B O_{B} OB指向 O G O_{G} OG的矢量,在B系中取坐标,这就是 T B G T_{BG} TBG的平移分量。
指定安装偏角 θ \theta θ,为B系的x轴转向G系x轴之间的转角,这就是 T B G T_{BG} TBG的旋转分量。
得到转换矩阵 T B G T_{BG} TBG为:
T B G = [ R Z ( θ ) t 0 1 ] T_{BG}=\begin{bmatrix} R_{Z}(\theta ) & t\\ 0 &1 \end{bmatrix} TBG=[RZ(θ)0t1]
机器人坐标系到世界坐标系的变化矩阵 T W B T_{WB} TWB,最终由RTK的读数和标定的外参计算可得为:
T W B = T W G T G B T_{WB}=T_{WG}T_{GB} TWB=TWGTGB
分开写为:
R W B = R W G R G B , t W B = R W G t G B + t W G R_{WB}=R_{WG}R_{GB} , t_{WB}=R_{WG}t_{GB}+t_{WG} RWB=RWGRGB,tWB=RWGtGB+tWG
代码如下:
将方法构造成一个函数
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
bool ConvertGps2UTM(GNSS& gps_msg, const Vec2d& antenna_pos, const double& antenna_angle, const Vec3d& map_origin)
其中 第一个参数 GNSS 其结构体定义如下:
/// 一个GNSS读数结构
struct GNSS {GNSS() = default;GNSS(double unix_time, int status, const Vec3d& lat_lon_alt, double heading, bool heading_valid): unix_time_(unix_time), lat_lon_alt_(lat_lon_alt), heading_(heading), heading_valid_(heading_valid) {status_ = GpsStatusType(status);}double unix_time_ = 0; // unix系统时间GpsStatusType status_ = GpsStatusType::GNSS_NOT_EXIST; // GNSS 状态位Vec3d lat_lon_alt_ = Vec3d::Zero(); // 经度、纬度、高度,前二者单位为度double heading_ = 0.0; // 双天线读到的方位角,单位为度bool heading_valid_ = false; // 方位角是否有效UTMCoordinate utm_; // UTM 坐标(区域之类的也在内)bool utm_valid_ = false; // UTM 坐标是否已经计算(若经纬度给出错误数值,此处也为false)SE3 utm_pose_; // 用于后处理的6DoF Pose
};
第二个参数是安装偏移量,第三个参数是安装偏移角度,第四个参数是地图原点。
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
经纬高转换为UTM
UTMCoordinate utm_rtk;if (!LatLon2UTM(gps_msg.lat_lon_alt_.head<2>(), utm_rtk)) {return false;}utm_rtk.z_ = gps_msg.lat_lon_alt_[2];
用之前介绍的的LatLon2UTM函数
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
如果 卫星导航方案是 双天线RTK则数据中带有方位角信息 ,根据方位角信息是否效,来设置rtk方位角
有的rtk的方位角是北东地坐标系,如果转成东北天坐标系则需要进行一个转换
一个北东地坐标系的方位角h,转换到东北天坐标系下的角度 h ’ h^{’} h’的转换公式为:
h ’ = π / 2 − h h^{’} =\pi /2-h h’=π/2−h
/// RTK heading 转成弧度double heading = 0;if (gps_msg.heading_valid_) {heading = (90 - gps_msg.heading_) * math::kDEG2RAD; // 北东地转到东北天}
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
构建卫星导航坐标系到机器人坐标系的转换矩阵,根据外参的测量结果
此时存在两种情况,第一种双天线RTK,存在安装偏移量与安装偏移角度。
SE3 TBG(SO3::rotZ(antenna_angle * math::kDEG2RAD), Vec3d(antenna_pos[0], antenna_pos[1], 0));SE3 TGB = TBG.inverse();
其中 antenna_angle 就是安装偏移角度,是机器人坐标系x轴转向卫星导航坐标系x轴之间的转角
antenna_pos 就是安装偏移量,是机器人坐标系原点指向卫星导航坐标系原点的矢量,在机器人坐标系中取坐标
然后就可以求得 T W B T_{WB} TWB
// 若指明地图原点,则减去地图原点double x = utm_rtk.xy_[0] - map_origin[0];double y = utm_rtk.xy_[1] - map_origin[1];double z = utm_rtk.z_ - map_origin[2];SE3 TWG(SO3::rotZ(heading), Vec3d(x, y, z));TWB = TWG * TGB;
另一种情况,单点GPS,存在安装偏移量,但是单点GPS不输出方位角,没有卫星导航坐标系,仅有机器人坐标系到GPS中心的角度
需要通过状态估计算法得到的机器人姿态的方位角直接构成 R W B R_{WB} RWB,此时还需要设置一个 R B G R_{BG} RBG,因为没有偏移角度,所以说叫设置一个,比如就认为B系和G系的方向一致,那么 R B G = I R_{BG} = I RBG=I,然后再得到 R W G R_{WG} RWG。
// 单点gps方案情况float uav_yaw;SO3 RWB = SO3::rotZ(uav_yaw * math::kDEG2RAD);SO3 RBG = SO3::rotZ(0 * math::kDEG2RAD);SO3 RWG = RWB*RBG;// 若指明地图原点,则减去地图原点double x = utm_rtk.xy_[0] - map_origin[0];double y = utm_rtk.xy_[1] - map_origin[1];double z = utm_rtk.z_ - map_origin[2];SE3 TWG(RWG, Vec3d(x, y, z));SE3 TBG(RBG,Vec3d(antenna_pos[0], antenna_pos[1], 0));SE3 TGB = TBG.inverse();TWB = TWG * TGB;
+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
然后则对gps结构体中utm的坐标进行赋值即可
gps_msg.utm_valid_ = true;gps_msg.utm_.xy_[0] = TWB.translation().x();gps_msg.utm_.xy_[1] = TWB.translation().y();gps_msg.utm_.z_ = TWB.translation().z();if (gps_msg.heading_valid_) {// 组装为带旋转的位姿gps_msg.utm_pose_ = TWB;} else {// 组装为仅有平移的SE3// 注意当安装偏移存在时,并不能实际推出车辆位姿gps_msg.utm_pose_ = SE3(SO3(), TWB.translation());}
在gazebo中,设置gps在中心位置,那么则可以设置偏移量和偏移角度为0,然后设置起点位置为原点。
添加路径显示
geometry_msgs::PoseStamped pose_stamped;pose_stamped.header.stamp = ros::Time::now();pose_stamped.header.frame_id = "/local_frame";pose_stamped.pose.position.x = gps_msg.utm_.xy_[0];pose_stamped.pose.position.y = gps_msg.utm_.xy_[1];pose_stamped.pose.position.z = gps_msg.utm_.z_;pose_stamped.pose.orientation.x = 0;pose_stamped.pose.orientation.y = 0;pose_stamped.pose.orientation.z = 0;pose_stamped.pose.orientation.w = 1;UavGpsPath_.poses.push_back(pose_stamped);UavGpsPath_.header.stamp = ros::Time::now();UavGpsPath_.header.frame_id = "/local_frame";GPS_Path_pub_.publish(UavGpsPath_);
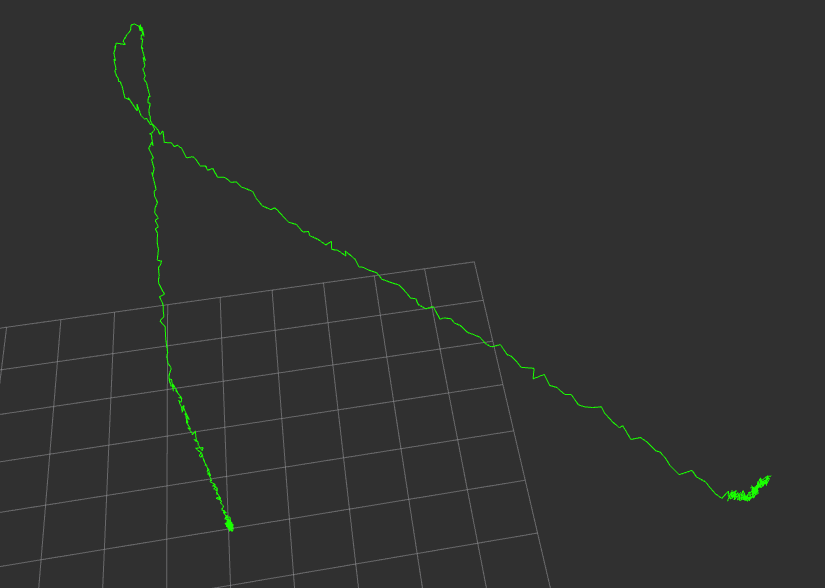
模拟场gps定位精度好,rtk的水平定位精度可以到达2cm,垂直6cm
设置gps的定位噪声如下:
horizontal_pos_std_dev="0.02"vertical_pos_std_dev="0.06"
随便飞了一个轨迹
前面场景下的gps定位效果好的情况下,如果gps定位的精度不高,则会出现下面的情况
horizontal_pos_std_dev="0.2"vertical_pos_std_dev="0.4"
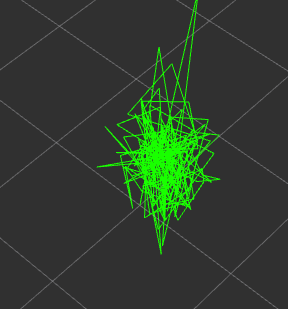
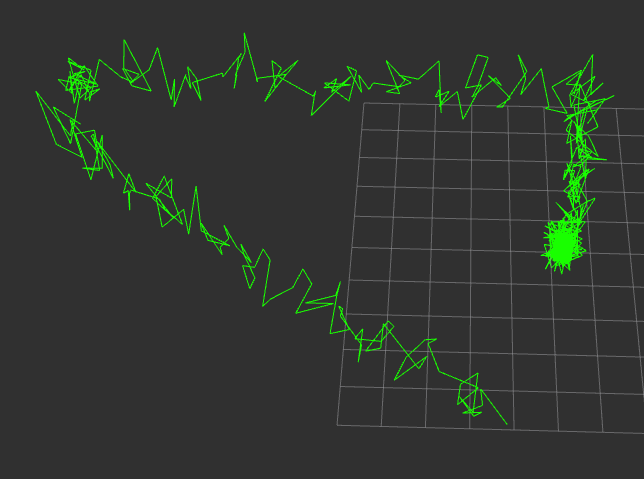
由于GPS输出的频率低,并且在信号不好的情况下,会出现较大的噪声,所以并不能直接用于机器人导航,一般会和IMU进行融合,实现组合导航。
这篇关于地理坐标系与UTM坐标系转换并进行gazebo测试的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




