坐标系专题

005:VTK世界坐标系中的相机和物体
VTK医学图像处理---世界坐标系中的相机和物体 左侧是成像结果 右侧是世界坐标系中的相机与被观察物体 目录 VTK医学图像处理---世界坐标系中的相机和物体 简介 1 在三维空间中添加坐标系 2 世界坐标系中的相机 3 世界坐标系中vtkImageData的参数 总结:

点云数据常见的坐标系有哪些,如何进行转换?
文章目录 一、点云坐标系分类1. 世界坐标系2. 相机坐标系3. 极坐标系4. 笛卡尔坐标系(直角坐标系):5. 传感器坐标系6. 地理坐标系 二、坐标系转换方法1. 地理坐标系与投影坐标系之间的转换2. 投影坐标系与局部坐标系之间的转换3. 局部坐标系与3D模型坐标系之间的转换4. 相机坐标系与其他坐标系之间的转换5. 传感器坐标系与其他坐标系之间的转换 三、坐标系转换工具 一

火星坐标系 (GCJ-02) 与百度坐标系 (BD-09) 的转换算法
关于 GCJ-02 和 BD-09 ,请参考 http://developer.baidu.com/map/question.htm#qa0043 。 算法代码如下,其中 bd_encrypt 将 GCJ-02 坐标转换成 BD-09 坐标, bd_decrypt 反之。 [cpp] view plain copy print ? #include <math.h> con

cocos2d-x基础知识(四) 简单菜单及坐标系
关于cocos2d坐标系的一点点心得 cocos2d-x 中关于convertToNodeSpace 的用法: cocos2d-x 中关于convertToNodeSpace 的用法: A->converToNodeSpace(CCPoint point )的意思是将point 转换成A的坐标系中的位置点。 我在做连连游戏中由于精灵在自定义的CC
cocos2d-x基础知识 坐标系 -- 很好的文章
无论是搞2d还是3d开发,最需要搞清楚的就是坐标系,这部分混乱的话就没啥奔头了。所以玩cocos2d,一上来就先把各种与坐标有关的东西搞清楚。 基本的两个坐标系:屏幕坐标系和GL坐标系。 屏幕坐标系x轴朝右,y轴朝下。默认原点在左上角。 GL坐标系x轴朝右,y轴朝上。默认原点在左下角。 在调用任何需要设置位置的函数,或从函数获取位置信息前,

A\B求解将 B转换到 A 的坐标系中的变换
%% 将罐子附加到末端执行器removeBody(robot,'leftWidgetFrame');removeBody(robot,'rightWidgetFrame');% 获取机器人手部的当前姿态graspConfig = qInterpFROMinitialGOTOgrasp(end,:);leftGripperFramePose = getTransform(robot,gra

机器视觉1-1:齐次坐标系 Homogeneous Coordinates
参考Homogeneous Coordinates ,Michigan Technological University 的 Dr. C.-K. Shene写的Introduction to Computing with Geometry Tutorial之中的一部分,摘录+翻译。 引入齐次坐标系的原因之一是为了描述infinity(无穷远点)。 One of the many purpos
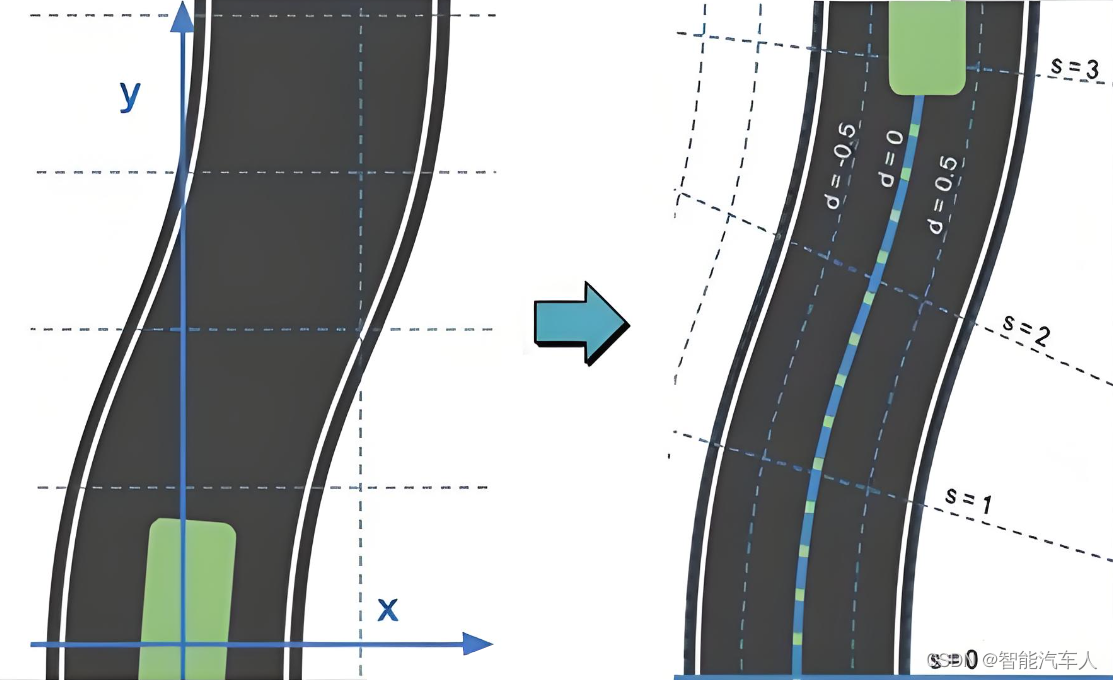
自动驾驶---什么是Frenet坐标系?
1 背景 为什么提出Frenet坐标系?Frenet坐标系的提出主要是为了解决自动驾驶系统在路径规划的问题,它基于以下几个原因: 符合人类的驾驶习惯: 人类驾驶员在驾驶过程中,通常不会关心自己距离起点的横向和纵向距离,而是会关注车辆相对于道路的相对位置,比如与车道线的距离。Frenet坐标系提供了一种与人类驾驶习惯相符的描述方式,使得自动驾驶系统能够更好地模拟人类的驾驶行为。
convertToWorldSpace转换为世界坐标系用法
先假想一个场景,场景里有一个主角,主角身上有一个物品。假如物品是以主角为父节点的. 现在问题来了,物品现在的坐标系,现在我想判断用户是否点击在该物品上, 那么我怎么得出物品在相对与屏幕的坐标呢? cocos2dx提供了一个方法: sprite->getParent()->convertToWorldSpace(sprite->getPosition()),其中sprite为物品精灵的指针,get

Unity坐标系计算3D中两直线的最短距离及最近点的几何原理
方法1: 已知空间中两直线AB, CD,判断它们是否相交 问题的关键是求出这两条直线之间的最短距离,以及在这个距离上最接近两线的点坐标,判断该点是否在直线AB和直线CD上。 首先将直线方程化为对称式,分别得到两直线方向向量AB=(x1,y1,z1), CD=(x2,y2,z2),再将两向量AB, CD叉乘得到其公垂向量N=(x,y,z),在AB, CD两直线上分别选取点E

拉普拉斯算子从笛卡尔坐标系到圆柱坐标系下的推导过程
这段时间推导圆膜振动方程的时候,需要将振动方程从笛卡尔坐标系转换到圆柱坐标系。虽然这个结果书上都有了,但是不满足于直接给出的结果,想自己推导一下。于是就有了下面的内容。总结起来:就是将笛卡尔坐标系下的拉普拉斯算子定义式和圆柱坐标系下拉普拉斯算子定义式之间的关系通过坐标转换对应起来,然后利用待定系数法求解相应的系数就可以了。话不多说,上干货。 笛卡尔坐标系下的拉普拉斯算子定义为: (2-1)

threejs绘制带箭头的坐标系
效果图: 和旋转(qua
MATLAB绘图确定坐标系的显示范围
axis函数的使用 两维情况下:axis([Xmin Xmax Ymin Ymax]) 三维情况下:axis([Xmin Xmax Ymin Ymax Zmin Zmax])

Threejs学习-三维坐标系、相机控件
坐标系: Three.js 使用的是右手坐标系,x 轴朝右,y 轴朝上,z 轴朝向自己。 相机控件轨道控制器 相机控件OrbitControls 通过相机控件OrbitControls实现旋转缩放预览效果。 // 设置相机控件轨道控制器OrbitControlsconst controls = new OrbitControls(camera, renderer.domElemen


前端实现投影坐标和地理坐标系(CGCS2000)转换
前言 地理坐标系和投影坐标系是地理信息系统(GIS)和制图学中用于描述地球表面位置的两种不同的参考系统。它们在使用方式和应用场景上有显著的区别。 1、什么是地理坐标系和投影坐标系? 1.1、地理坐标系 地理坐标系是基于地球的三维球面模型来描述位置的系统。地理坐标系通常使用经度和纬度来表示地球表面的任何一个点。常见的地理坐标系:WGS1984(World Geodetic System 19
关于ENU与LLA坐标系互相转换的python代码
关于ENU与LLA坐标系互相转换的python代码 import math# WGS84 ellipsoid parametersWGS_PARAMS = {'a': 6378137,'f': 1 / 298.257223563,'b': 6378137 * (1 - 1 / 298.257223563),}wgs84_a = 6378137wgs84_b = 6378137 * (1

Qt坐标系统之三个坐标系和两个变换
前言 Qt坐标系统由QPainter类控制。它和QPaintDevice和QPaintEngine类一起构成Qt绘图系统的基础。QPainter用于执行绘图操作,QPaintDevice是QPainter用来绘制的一个二维空间的抽象,QPaintEngine提供在不同设备绘图的接口。 Qt 的坐标分为逻辑坐标和物理坐标。在我们绘制时,提供给QPainter的都是逻辑坐标。所谓物理坐标,就是绘制底


ArcGIS如何将投影坐标系转回为地理坐标系
有时候两个数据,一个为投影坐标系,另一个为地理坐标系时,在GIS软件中位置无法叠加到一起,这需要将两个或多个数据的坐标系统一,可以直接将地理坐标系的数据进行投影,或将投影坐标系转为地理坐标系。下面介绍如何将数据的投影坐标系转回为对应的地理坐标系。 使用ArcGIS将数据的投影坐标系转回为地理坐标系时,若数据为矢量数据,则可使用ArcGIS工具箱中的【数据管理工具】—【投影和变换】—【投影】,将数

Canvas 绘制坐标系中的点以及折线
需求 上一篇章介绍了如何使用Canvas绘制坐标系,那么本篇章来看看怎么简单绘制坐标系中的点。 示例图如下: 可以看到这里绘画的坐标点比较大,为了更好看一些。其实不管大小,基本的绘制步骤如下: 设置坐标点的中心圆点位置(x0,y0)设置坐标点的大小 dotSize计算坐标点的上下左右四角的点坐标 条件1和2可以直接通过设置获取,而坐标点上下左右四角坐标看看下面的计算
OSG数学基础:坐标系变换
三维实体对象需要经过一系列的坐标变换才能正确、真实地显示在屏幕上。在一个场景中,当读者对场景中的物体进行各种变换及相关操作时,坐标系变换是非常频繁的。坐标系变换通常包括:世界坐标系-物体坐标系变换、物体坐标系-世界坐标系变换和世界坐标系-屏幕坐标系变换(一个二维平面坐标系,即显示器平面,是非常标准的笛卡尔坐标系的第一象限区域)。 世界坐标系-物体坐标系变换 它描述的问题主要是关于物体本身的

NX/UG二次开发—CAM—获取加工环境下所有程序组、刀具组、加工坐标系并输出名称
以下代码为CAM所有程序组、刀具组、加工坐标系并输出名称 源文件在群共享文件中。(QQ群:1023204977)
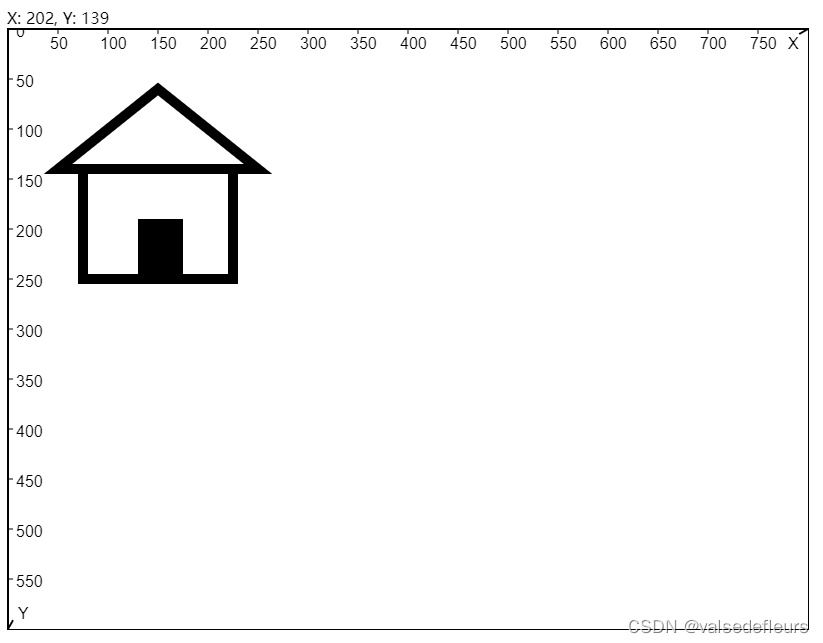
绘制Canvas坐标系
知识要点 canvas中的坐标是从左上角开始的,x轴沿着水平方向(按像素)向右延伸,y轴沿垂直方向向下延伸。左上角坐标为x=0,y=0的点称作原点。在默认坐标系中,每一个点的坐标都是直接映射到一个CSS像素上。 代码 对于canvas的初学者,我们可以在绘制坐标系来辅助canvas设计,以下是一段示例代码: HTML <div id="coordinates">X: 0, Y: 0</d

python cv2摄像头校准,坐标系转换
代码 先上代码链接: 链接: https://pan.baidu.com/s/1vk1hYcOHdfadU-XwJQQS6g 提取码: cn2h 功能说明 摄像头校准:内参,外参获取,测试校准点图片视频畸变还原2D像素坐标坐标转3D世界坐标3D世界坐标转2D像素坐标 流程分析 使用相机拍摄或直接使用现有的内参和外参图片张友正标定法获取内参参数获取外参标记点的世界坐标和像素坐标使用PNP算
实现ROS中两个里程计数据的转换到同一坐标系下
在多传感器融合的场景中,不同传感器可能会提供不同的位置信息。这段代码的目标是将来自两个不同来源的里程计数据转换到同一个参考坐标系(在这里,选择 odom0 的坐标系作为参考)下进行对齐,以便于后续的融合和处理。 核心步骤解析 读取和订阅里程计数据: 代码首先从ROS参数服务器读取里程计数据的订阅话题名称。然后,订阅来自两个不同来源的里程计数据,并通过回调函数来更新全局变量 o