urdf专题

urdf ( xacro ) 的 collision碰撞参数设置
目录 写在前面的话整体流程1 URDF 文件结构2 查看原始碰撞形状描述3 加入简单碰撞形状描述方法一 Meshlab 自动测量方法二 人为测量 4 加入XACRO函数简化描述 最终结果展示侧视图正视图碰撞几何体中心点设置不对出现的结果 写在前面的话 本文使用的 URDF 文件是由 solidworks 的 URDF export 插件生成,详情请看上一篇文章:solidwor

solidworks模型导出urdf(超详细)
目录 写在前面的话1 solidworks 文件2 安装sw2urdf插件3 完整步骤3.1 设置基准轴3.2 设置点3.3 设置坐标轴3.4 设置sw2urdf参数3.5 导出可能的问题3.6 ros2 编译3.7 成功结果画面 写在前面的话 刚进组1个月,我的博士研究方向是自动驾驶,还没入门,先看了古月居的ros2框架课程,现在需要开始进行仿真实验,基于实验室现有的车子进行

xacro->urdf->pdf
在ROS 2系统中,要将xacro文件转换为PDF文件,可以按照以下步骤操作: 步骤1:将Xacro文件转换为URDF文件 首先,需要将xacro文件转换为urdf文件。可以使用ROS 2提供的xacro工具来完成这个转换。 ros2 run xacro xacro path_to_xacro_file.xacro -o output.urdf -o等价于> ros2 run xacr

C++入门 ros中urdf整合rviz
一、 开发环境 ubuntu20.04 ros版本noetic 参考视频 https://www.bilibili.com/video/BV1Ci4y1L7ZZ/?p=52&spm_id_from=333.1007.top_right_bar_window_history.content.click&vd_source=4cd1b6f268e2a29a11bea5d2568836ee 二、 编

SolidWorks生成URDF文件,并配置
SolidWorks生成URDF文件,并配置 本文主要讲解如何生成URDF,然后通过MoveIt Setup Assistant配置urdf文件。主要有以下几点: 0 : ROS::WIKI URDF 1:sw_urdf_exporter插件。 2:配置生成可执行的包。(插件生成的是ros包,不是简单的文件夹) 3:调用包内urdf文件:,生成配置文件。 4:使用 0 . ROS::

rviz和URDF的生成
在ROS(Robot Operating System)中,.rviz文件是一种配置文件,用于存储RViz(ROS Visualization Tool)的布局和设置。当你在RViz中调整视图,添加话题(topics)、显示类型(displays)和其他参数后,可以保存这些配置,以便下次直接加载相同的设置,而不需要重新配置。下面是生成.rviz配置文件的步骤: 启动RViz: 首先,你需要启动
ros 学习记录(二)URDF小车运动控制
URDF小车运动控制 准备工作创建 robot_xacro.launch 接上文,想用键盘控制小车在Gazebo中移动。 准备工作 名称版本ROSNoeticGazebo11.11.0 创建 robot_xacro.launch 通过运行这个launch文件,可以启动Gazebo仿真环境,并在仿真环境中加载和控制机器人模型。 cd ~/roboT_four/src/ro
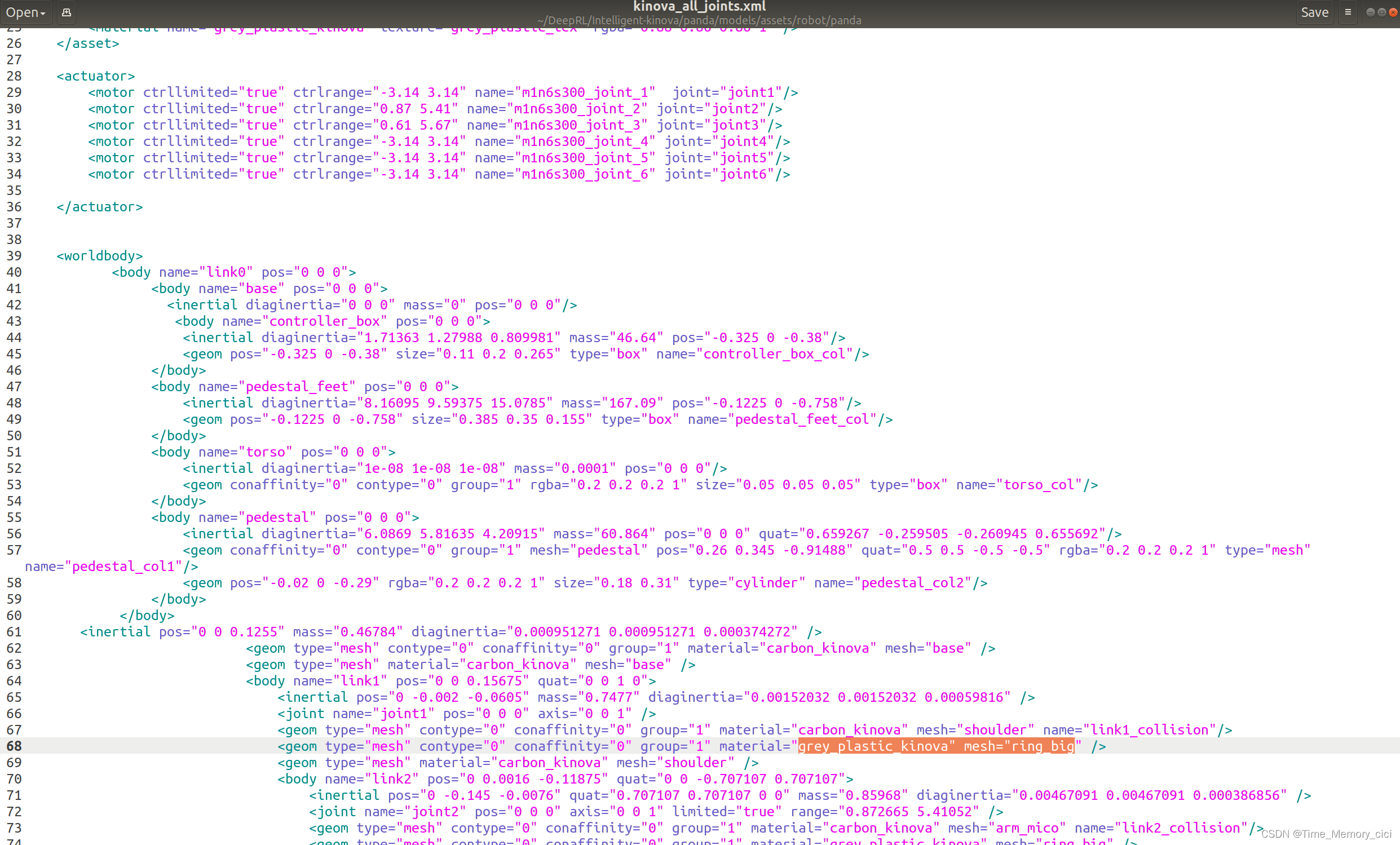
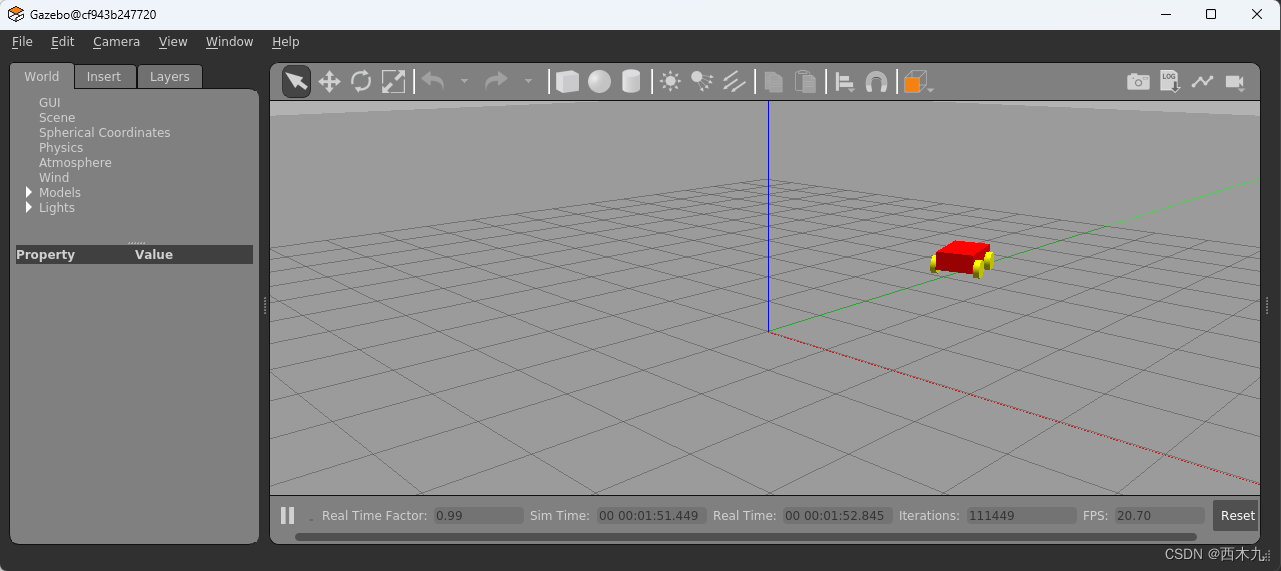
搭建强化学习的机械臂MuJoCo环境以及urdf转xml文件方法
一、背景 基于强化学习的机械臂应用日趋广泛,摆脱了基于模型到达固定点的束缚。基于强化学习算法,机械臂可以完成拧魔方、推抓任务(Andy Zeng的经典论文),暂且想一下如果用传统方法完成此类复杂任务是何等困难。 强化学习作为一种试错的方式,在真实机械臂上进行训练不仅耗时,且会对环境或机器造成损坏,而在仿真环境中进行训练是一种可行的方式。MuJoCo作为当前主流的强化学习化境配置较为繁琐,这里简
机械臂模型更换成自己的urdf模块
1.将urdf生成slx文件 smimport('rm_65_flange.urdf');%生成Simscape物理模型 2.更换joint部分(对应与几个输入几个输出)(依次更换) 3.更改关节部分(依次更换) 找到urdf文件夹下的meshes文件夹,看到里面的STL文件
第 6 章 URDF、Gazebo与Rviz综合应用(自学二刷笔记)
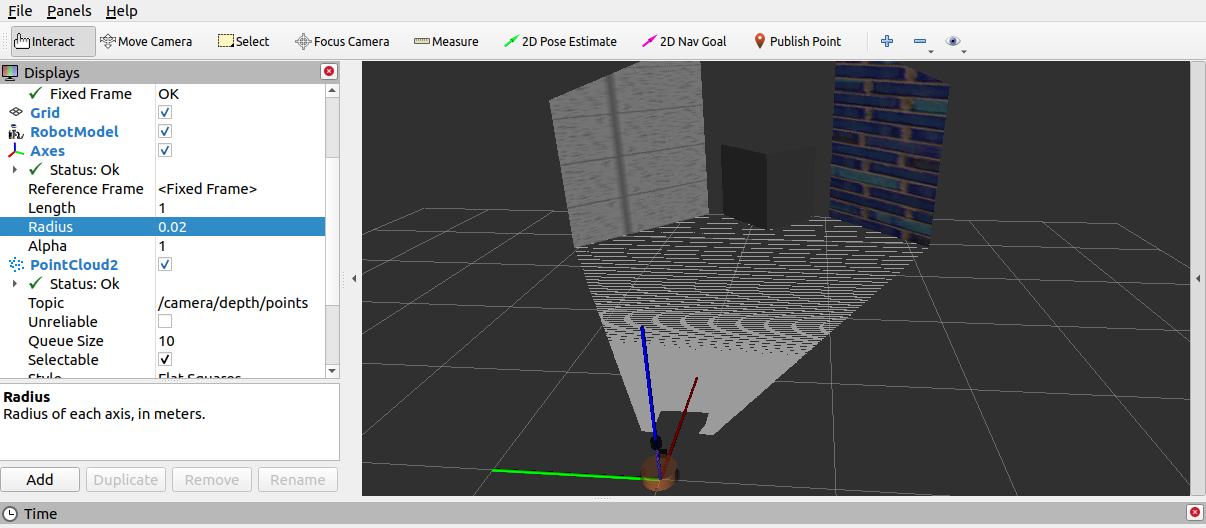
重要参考: 课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ 讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 6.7.4 kinect信息仿真以及显示 通过 Gazebo 模拟kinect摄像头,并在 Rviz 中显示kinect摄像头数据。 实现流程: kinect摄像头仿
![[ROS 系列学习教程] 建模与仿真 - URDF 语法介绍](https://img-blog.csdnimg.cn/direct/9c48e82e2ba24645837a6c6a038cecd1.png#pic_center)
[ROS 系列学习教程] 建模与仿真 - URDF 语法介绍
ROS 系列学习教程(总目录) 本文目录 一、robot标签二、link标签三、joint标签 URDF文件中使用XML格式描述的机器人模型,下面介绍URDF的XML标签。 一、robot标签 机器人描述文件中的根元素必须是robot,所有其他元素必须封装在其中。 属性 name:主文件必须具有名称属性。 name属性在包含的文件中是可选的。如果在附加包含文件中指定属性名
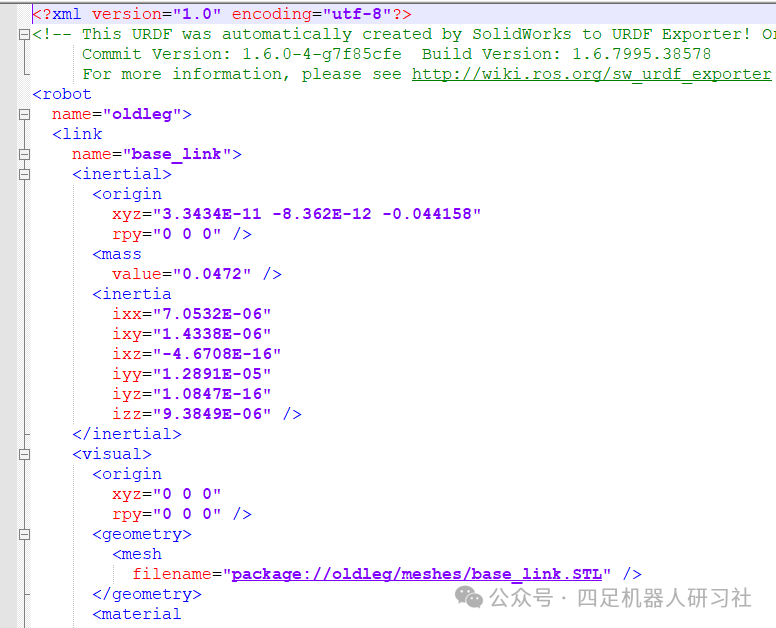
四足机器人应用篇之solidwork导出URDF
欢迎关注微信公众号 “四足机器人研习社”,本公众号的文章和资料和四足机器人相关,包括行业的经典教材、行业资料手册,同时会涉及到职业知识学习及思考、行业发展、学习方法等一些方面的文章。 |1.URDF介绍 一个URDF pakage示例 urdf是ROS用于描述机器人所有元素的模型文件,采用XML格式书写,全称是United Robotics Desc
第 6 章 URDF集成Gazebo(自学二刷笔记)
重要参考: 课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ 讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 6.6 URDF集成Gazebo URDF 需要集成进 Rviz 或 Gazebo 才能显示可视化的机器人模型,前面已经介绍了URDF 与 Rviz 的集成,本节主要介绍
第 6 章 ROS-URDF练习(自学二刷笔记)
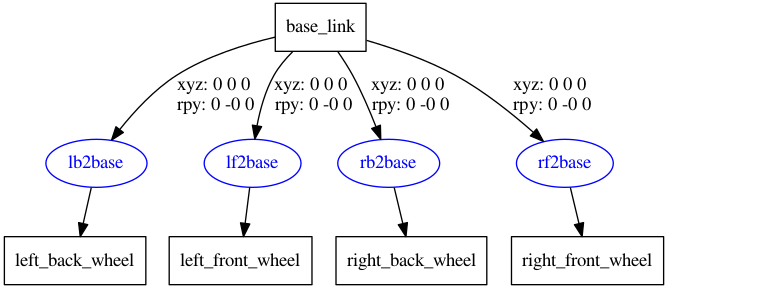
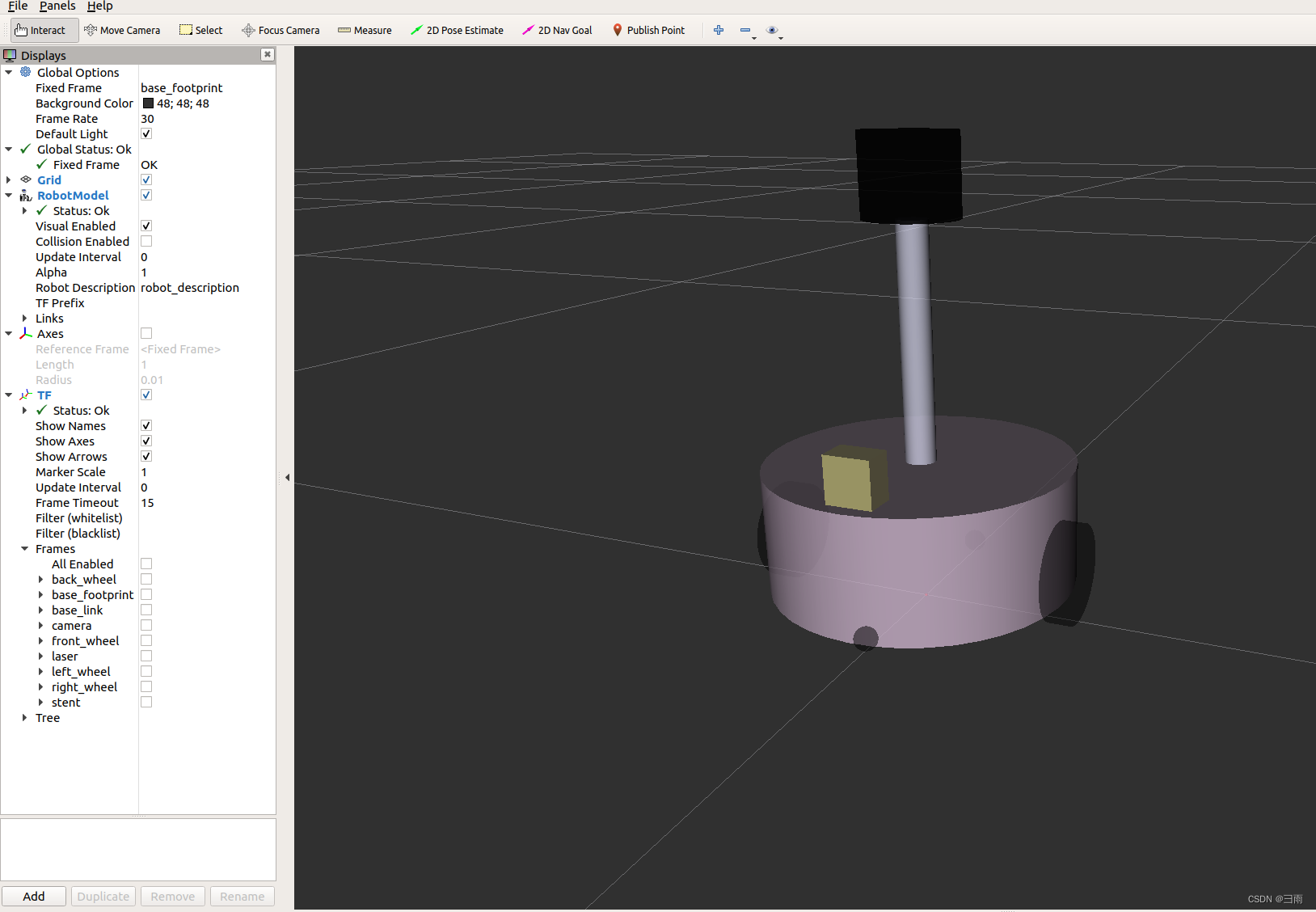
重要参考: 课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ 讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程 6.3.4 URDF练习 需求描述: 创建一个四轮圆柱状机器人模型,机器人参数如下,底盘为圆柱状,半径 10cm,高 8cm,四轮由两个驱动轮和两个万向支撑轮组成,
ROS学习——URDF机器人建模
ROS学习——URDF机器人建模 什么是URDFURDF机器人模型的内容URDF机器人模型的标签一、创建URDF功能包创建URDF模型step 1 使用圆柱体创建一个车体模型step 2 创建左侧车轮step 3 创建右侧车轮step 4 创建前后支撑轮step 5 添加传感器摄像头step 6 添加传感器激光雷达step 7 加入Kinect 什么是URDF Unified
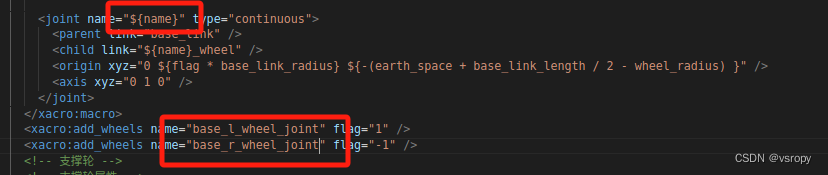
“base_l_wheel_joint“ was received but not found in URDF
运行demo05_car_base.urdf.xacro文件时报错: [ WARN] [1620731067.801481542]: Joint state with name: "base_l_wheel_joint" was received but not found in URDF 原因: 可能要与下载xacro的文件名称一致 解决: 将left和right(一样会
ROS 机器人描述--URDF和XACRO
1. 关于URDF的一些杂谈 URDF(Unified Robot Description Format), 是一种特殊的xml文件格式, 作为机器人的一种描述文件, 在ROS里面大量使用. 接触ROS比较久的同学, 应该会经常见到一种类似命名的包(package) – xxx_description. 这个包里面就是包含某个机器人的描述文件. 比如pr2_decription, baxter_

ROS URDF、rviz、gazebo(1)
文章目录 1.URDF优化_xacro:1.1.xacro语法:1.2.xacro之launch集成: 2.arbotix控制机器人运动:2.1.编写arbotix配置文件:2.2.配置launch文件:2.3.向话题发布信息: 3.URDF集成gazebo:3.1.创建功能包并导入相关依赖:3.2.编写URDF文件:3.2.1.collision:3.2.2.inertial:3.2.3.
【ROS机器人系统】实验 2 熟悉和使用 URDF 创建机器人模型
文章目录 实验 2 熟悉和使用 URDF 创建机器人模型1、实验目的2、实验设备3、实验内容3.1 创建 URDF 机器人模型:(1)URDF 介绍(2)准备建立机器人模型·创建文件夹以及功能文件·编写相关机器人模型信息·运行演示·完善机器人·再次运行查看 动手实现1∶利用实验所学知识,为机器人添加另外两个轮子?3.2 在 URDF 中添加激光传感器·修改机器人模型

ROS建模:一起从零手写URDF模型
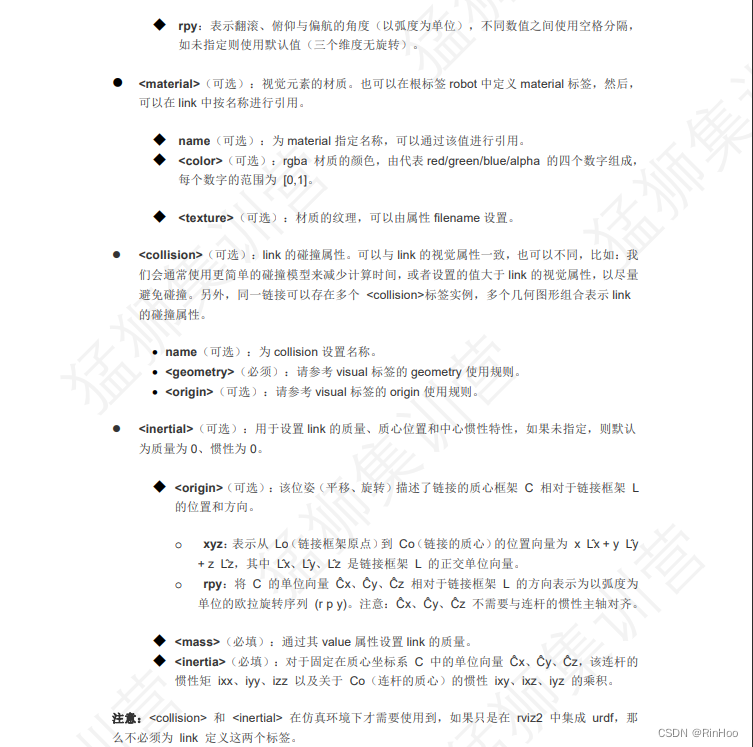
1、机器人的定义与组成 2、URDF建模方法 link的描述部分: 其中geometry中参数origin的xyz单位为: m,其描述的是相对于坐标系的平移变换; rpy单位为:弧度,其描述的是相对于坐标系下的旋转偏移 collision是指碰撞属性,也有着几何参数,图中的绿色方框就是cylinder圆柱体,可设置长和半径,主要是描述的区域不同了,与mesh中的stl
SDFormat extensions to URDF (the ‘gazebo‘ tag)tutorial(源自SDF文件官网,非gazebo官网)
这个是sdf文件 官网的文件,不是gazebo官网的文件,2者不是一个网站,请注意区分 SDFormat extensions to URDF (the 'gazebo' tag) — Documentation Toggle navigation SpecificationAPIDocumentationDownload Back Edit V
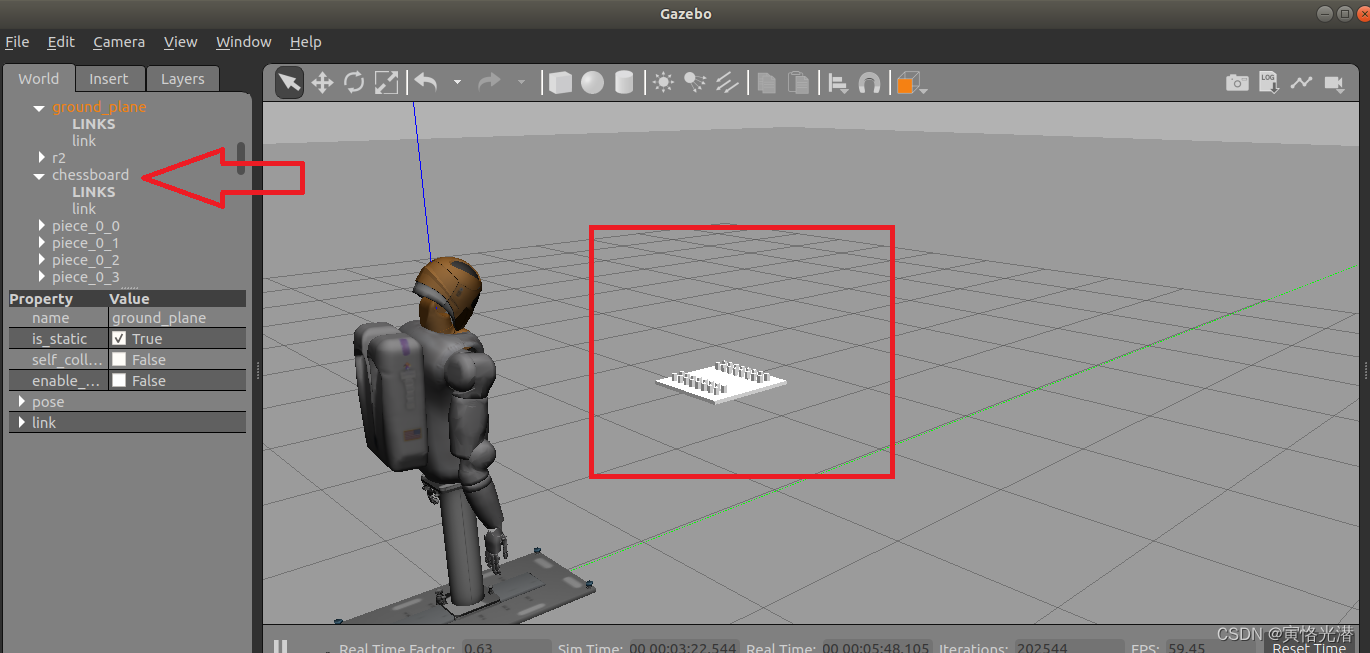
R2机器人加载棋盘与棋子模型,对urdf、sdf的解释(区分srdf)
1、概述 urdf、sdf、srdf文件都属于xml的规范格式,解释分别如下:urdf(unified robot description format)叫做"统一机器人描述格式",主要目的就是提供一种尽可能通用的机器人描述规范,这样对于机器人的描述就可以互相移植,比较方便。 sdf(simulation description format)能够描述机器人、静态和动态物体、照明、地形甚至物理
ROS-urdf集成gazebo
文章目录 一、URDF与Gazebo基本集成流程二、URDF集成Gazebo相关设置三、URDF集成Gazebo实操四、Gazebo仿真环境搭建 一、URDF与Gazebo基本集成流程 1.创建功能包 创建新功能包,导入依赖包: urdf、xacro、gazebo_ros、gazebo_ros_control、gazebo_plugins 2.编写URDF文件 <!-- 创建一
【ros笔记】urdf文件
urdf文件属于xml文件,他的标签有: <robot name="robot_name"><!-- 看的见摸的着刚体用link --><link name="base_link"><!-- 可视化部分 --><visual><!-- 几何形状 --><geometry><!-- box指的是长方体 --><box size="1.0 0.5 0.1" /></geometry></vi
ROS-机器人仿真urdf-rviz、xacro
文章目录 一、urdf集成rviz1.1 基本流程1.2 优化 rviz 启动 二、urdf语法详解2.1 robot2.2 link2.3 joint2.4 urdf练习2.5 urdf工具 三、URDF优化_xacro3-1 Xacro_语法详解3-2 Xacro_完整使用流程示例3- Xacro_实操 一、urdf集成rviz 1.1 基本流程 需求描述: 在 Rviz