本文主要是介绍机械臂模型更换成自己的urdf模块,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.将urdf生成slx文件
smimport('rm_65_flange.urdf');%生成Simscape物理模型

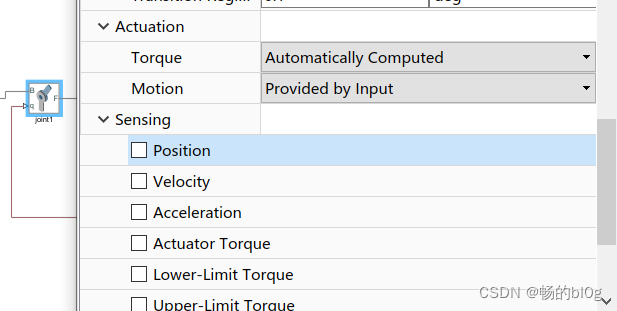
2.更换joint部分(对应与几个输入几个输出)(依次更换)
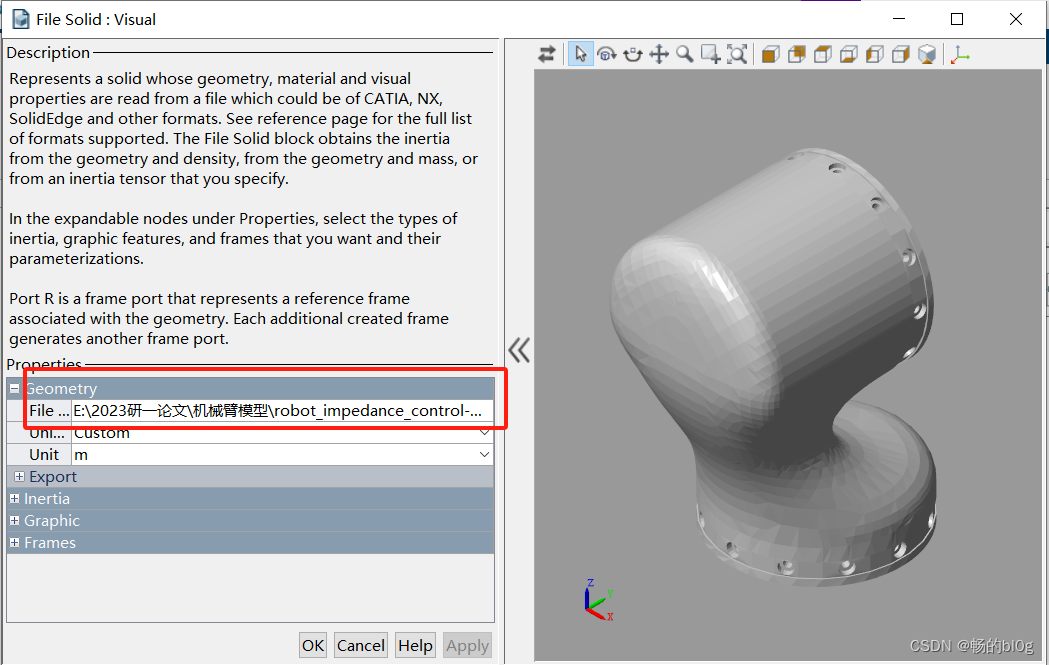
3.更改关节部分(依次更换)

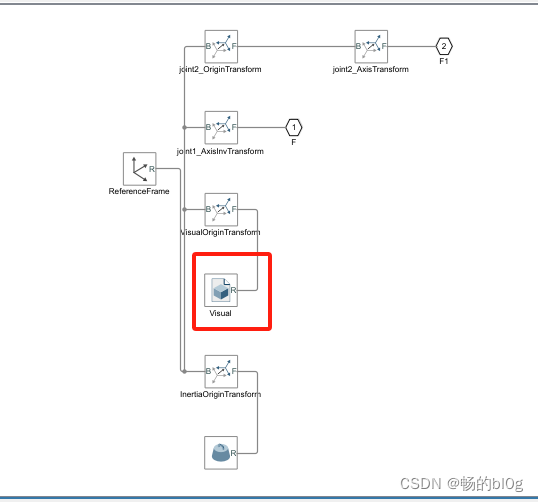
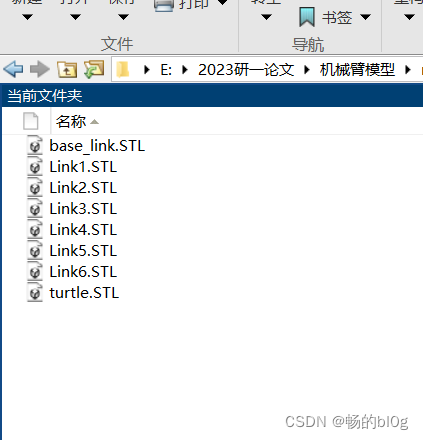
找到urdf文件夹下的meshes文件夹,看到里面的STL文件
这篇关于机械臂模型更换成自己的urdf模块的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





