ransac专题

Graph Cut Ransac代码编译过程
一、 论文简介 Graph Cut Ransac来自于CVPR2018,本文提出了一种新的鲁棒估计算法,叫做图割RANSAC,简称GC-RANSAC。当找到当前最好模型时,该算法在局部优化中使用图割算法来区分局内点和局外点。本文提出的局部优化算法理论简洁、易于实现,运行效率高。 原文链接:https://www.researchgate.net/publication/317356965_Gra

北斗导航 | 基于改进RANSAC算法的BDS接收机自主完好性监测算法研究
================================================ 博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 ================================================ Rearch on BDS RAI
通俗易懂理解RANSAC算法
RANSAC(Random Sample Consensus),翻译为随机抽样一致算法。 算法思路:从所有观测中随机找到几个尽可能少的点去拟合模型,拟合后依次计算模型和所有观测数据的残差,当残差小于给定的阈值时,就将其判断为内点,大于给定的阈值时,就判断为外点,并统计内点的数量,然后再次随机选取几个点拟合模型迭代。如果本次拟合内点数量大于先前的模型,就将旧模型迭代为新的模型。 做过AMCL算法

Python 点云平面分割【RANSAC算法】
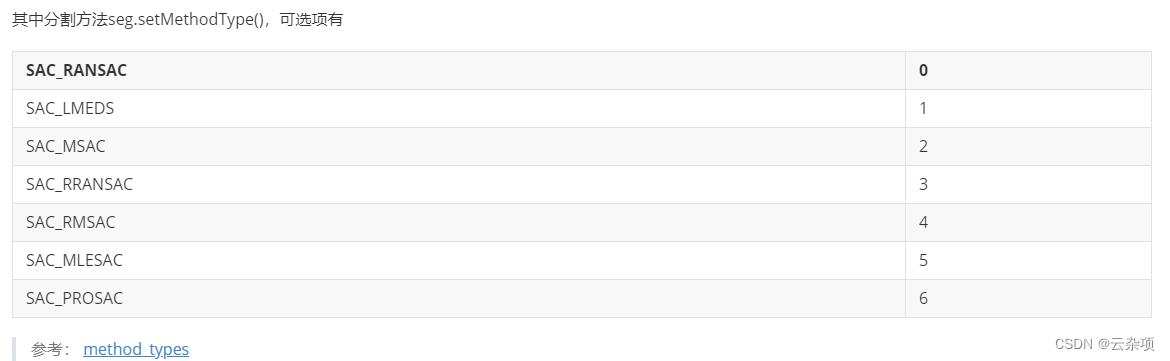
点云平面分割 一、介绍1.1 概念1.2 算法思路1.3 参数设置 二、代码示例三、结果示例 其他参考链接:C++中实现点云平面分割 一、介绍 1.1 概念 点云平面分割:可以在点云数据中找到平面并计算平面模型系数,同时输出平面点云及非平面点云。 1.2 算法思路 实现思路: 首先,采用RANSAC算法从点云中随机选取三个点作为初始平面模型。使用选定的三个点拟
PointCloudLib 点云Ransac拟合平面功能实现 C++版本
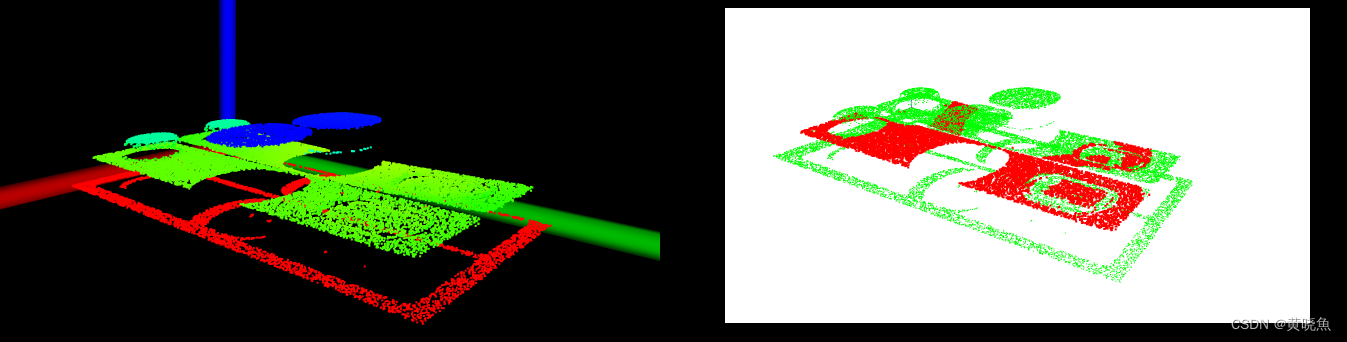
0.实现效果 左图为原始点云,右图中的红色点为拟合平面所选取的点,绿色的点为拟合平面所抛弃的点 拟合出的结果是一个平面方程。 1.算法原理 RANSAC(Random Sample Consensus,随机样本一致性)算法在拟合平面时的工作原理可以概括为以下几个步骤: 随机选择最小样本集: RANSAC算法首先会从数据集中随机选择三个点作为最小样本集。在三维空间中,三个非共线

RANSAC与LSP
最近又要用到ransac算法,之前学过也用过,但是好久没用,只知道是干什么用的,现在来重新总结一下,再来复习一遍: Ransac和最小二乘法都用于模型的最优估计;RANSAC是考虑局部有用的那些数据,取有用数据的模型;LSP考虑的是全局数据,取全局误差最小的模型 一、基础原理: RANSAC:称为随机抽样一致算法(random sample consensus,RANSAC),

【计算机视觉】Lecture 15:鲁棒估计:RANSAC
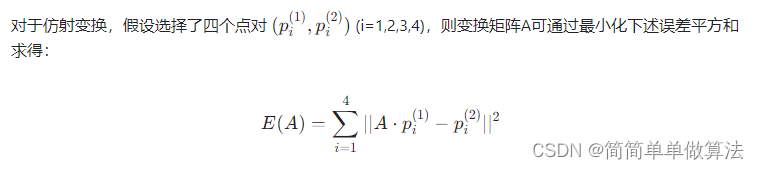
回忆:参数估计 假设我们找到了两幅图像之间的匹配点,我们认为它们是通过一些参数化变换(例如平移;尺度欧几里德;仿射)相关联的。我们如何估计此变换的参数? 基本策略 基于对应点的最小二乘估计 但这个方法有一些问题… 问题:异常点(外点Outliers) 粗略地说,外点是不符合模型的点。 错误数据->外点 粗略地说,外点是不符合模型的点。 符合模型的点被称为内点 外点问题 最
基于harris角点和RANSAC算法的图像拼接matlab仿真
目录 1.算法运行效果图预览 2.算法运行软件版本 3.部分核心程序 4.算法理论概述 5.算法完整程序工程 1.算法运行效果图预览 2.算法运行软件版本 MATLAB2022a 3.部分核心程序 .......................................................................I1_harr
CCCorelib 点云RANSAC拟合球体(CloudCompare内置算法库)
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 RANSAC是一种随机参数估计算法。RANSAC从样本中随机抽选出一个样本子集,使用最小方差估计算法对这个子集计算模型参数,然后计算所有样本与该模型的偏差,再使用一个预先设定好的阈值与偏差比较,当偏差小于阈值时,该样本点属于模型内样本点(内点),否则就是外样本点(外点)。记录当前的内点的个数,然后重复上述的过程,直到

OpenCV中的RANSAC详解
本文将openCV中的RANSAC代码全部挑选出来,进行分析和讲解,以便大家更好的理解RANSAC算法。代码我都试过,可以直接运行。 在计算机视觉和图像处理等很多领域,都需要用到RANSAC算法。openCV中也有封装好的RANSAC算法,以便于人们使用。关于RANSAC算法的一些应用,可以看我的另一篇博客: 利用SIFT和RANSAC算法(openCV框架)实现物体的检测与定位,并求
随机采样一致性识别模型 Ransac
pclpy 随机采样一致性识别模型 Ransac 一、算法原理1.背景2.运行说明1.显示带异常值的平面点云2.显示根据平面模型的随机采样一致性得到的平面点云3.显示带异常值的球形点云4.显示根据球形模型的随机采样一致性得到的球形点云 二、代码三、结果1.显示带异常值的平面点云2.显示根据平面模型的随机采样一致性得到的平面点云3.显示带异常值的球形点云4.显示根据球形模型的随机采样一致性
pclpy Ransac平面分割算法输出的索引从点云中提取点云的子集
pclpy Ransac平面分割算法输出的索引从点云中提取点云的子集 一、算法原理二、代码三、结果1.`sor`统计滤波2.`Ransac`内点分割平面3.`Ransac`外点分割平面 四、相关数据 一、算法原理 1、Ransac介绍 RANSAC(RAndom SAmple Consensus,随机采样一致)算法是从一组含有“外点”(outliers)的数据中正确估计数学

基础矩阵求解之RANSAC、8点算法(python)
本文介绍如何处理多个视图,求解不同图像对基础矩阵。通过在不同视点拍摄的图像,我们可以利用特征匹配来计算出三维场景点以及照相机位置。特征匹配在前几篇文章中讲过,可用SIFT算子或Harris角点检测,但相比之下sift效果更好,本文选择sift算法进行特征匹配。接下来我们介绍基础矩阵。 两幅视图存在两个关系:第一种,通过对极几何一幅图像上的点可以确定另外一幅图像上的一条直线;另外一种,通过上一种映射
OpenCV的SIFT特征点提取及RANSAC去除误检测
关于SIFT的讲解,参考:http://blog.csdn.net/zddblog/article/details/7521424 关于SANCAS的讲解,参考:http://blog.csdn.net/laobai1015/article/details/51682596 SIFT(Scale Invariant Feature Transform)多尺度特征点提取算法

Random Sample Consensus(RANSAC)的一点读后总结
RANSAC算法不同与传统的平滑过程,传统方法是利用尽可能多的数据来获得一个比较原始的解,然后尝试使用一些优化算法来消除invalid的数据点。对于RANSAC则是使用一个比较小的数据集,然后再尽可能的使用一致的数据来扩大原来初始化的数据集。 举个例子来说,如果我们要拟合一段二维点中的弧线,RANSAC会选择三个点作为一个集合(确定一个弧线需要三个点),然后计算中心和半径,也就是说这样圆的弧线就
![[Matlab]基于matlab的ransac平面拟合程序](https://img-blog.csdn.net/20170512111851001?watermark/2/text/aHR0cDovL2Jsb2cuY3Nkbi5uZXQvc25pa2VybGlp/font/5a6L5L2T/fontsize/400/fill/I0JBQkFCMA==/dissolve/70/gravity/SouthEast)
[Matlab]基于matlab的ransac平面拟合程序
输入:①数据 ②抽样次数N ③距离阈值t ④数量阈值T 输出:最终估计的模型 程序流程: 1。data :数据 2。取样本 :确定模型参数p所需要的最小数据数n,随机取n个数据作为一个样本J 3。建模型:根据样本J建立模型Mp(J)。 4。判断距离:根据模型Mp(J)判断所有数据点到模型的距离。 5。记录:记录 距离小于t的个数total 和 距离小于t的点的索引。 6。判断: 若


RANSAC算法拟合平面实现(附代码c++)
机械视觉3D检测项目中遇到的一些问题: 项目场景: 工业视觉双目条纹检测: 项目场景:示例:条纹投影检测芯片引脚高度 问题描述: 在做双目视觉,条纹投影获取点云图后,会遇到噪声点比较多的问题,并且这些噪声点是由于反光引起的,所以没有办法有效剔除噪声点,就会影响我们计算3D点的准确度。 在获取到点云数据后,我进行了滤波,然后将我认为没有异常的点拟合了一个平面,然后再去求我想要的某个p

Ransac 算法的探索和应用
Ransac 算法python 应用和实现 Ransac 算法是一种常用的图像匹配算法,在参数估计领域也经常被使用到。针对估计各种曲线的鲁棒模型参数,效果显著。这里对ransac算法进行某些探索。 python program: import numpy as npimport matplotlib.pyplot as pltimport randomimport math# 数据量。
机器学习笔记 - 随机样本共识(RANSAC) 算法
一、什么是 RANSAC? RANSAC(随机样本共识)是一种用于机器学习和计算机视觉的算法,随机样本共识(RANSAC)是一种迭代方法,用于根据包含异常值的数据集估计数学模型。RANSAC 算法的工作原理是识别数据集中的异常值,并使用不包含异常值的数据来估计所需的模型。 RANSAC的计算步骤: 随机选择数据集的子集将模型拟合到选定的子集
OpenCv霍夫变换与RANSAC检测圆形
https://blog.csdn.net/sinat_34156619/article/details/79574505 https://www.cnblogs.com/ssyfj/p/9275977.html https://blog.csdn.net/purgle/article/details/51925180 https://blog.csdn.net/purgle/article

论文解读--Robust lane detection and tracking with Ransac and Kalman filter
使用随机采样一致性和卡尔曼滤波的鲁棒的车道线跟踪 摘要 在之前的一篇论文中,我们描述了一种使用霍夫变换和迭代匹配滤波器的简单的车道检测方法[1]。本文扩展了这项工作,通过结合逆透视映射来创建道路的鸟瞰视图,应用随机样本共识来帮助消除由于道路噪声和伪影造成的异常值,以及一个卡尔曼滤波器来帮助平滑车道跟踪器的输出。 1.介绍 多年来,高速公路上的司机安全一直是人
02 RANSAC算法 及 Python 实现
文章目录 02 RANSAC算法 及 Python 实现2.1 简介2.2 算法流程2.3 RANSAC 算法实现直线拟合2.4 利用 RANSAC 算法减少 ORB 特征点误匹配 02 RANSAC算法 及 Python 实现 2.1 简介 RANSAC (Random Sample Consensus,随机抽样一致)算法的 基本假设 是样本中包含正确数据(inliers

Signal Processing and Pattern Recognition in Vision_15_RANSAC:Random Sample Consensus——1981
此部分是 计算机视觉中的信号处理与模式识别 与其说是讲述,不如说是一些经典文章的罗列以及自己的简单点评。与前一个版本不同的是,这次把所有的文章按类别归了类,并且增加了很多文献。分类的时候并没有按照传统的分类方法,而是划分成了一个个小的门类,比如SIFT,Harris都作为了单独的一类,虽然它们都可以划分到特征提取里面去。这样做的目的是希望能突出这些比较实用且比较流行的方法。为了以后维护的方便,按
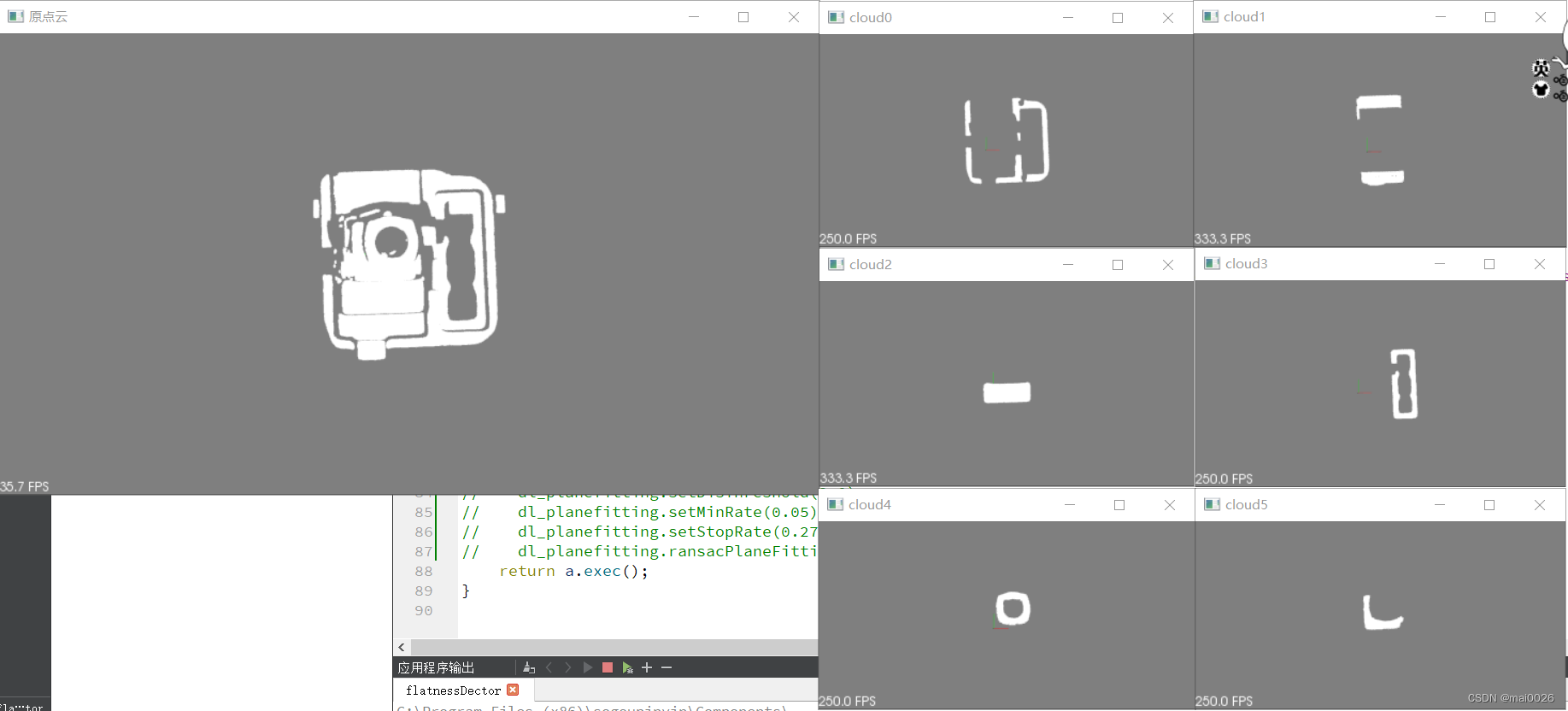
RANSAC法拟合平面的实现
RANSAC法拟合平面 本文衔接前一篇《最小二乘法实现平面拟合》,基于C++实现了PCL官方的平面拟合,用一个复杂铸件的点云图像进行测试。时间有限,难以确保程序不会出现bug,该文章仅供参考。 效果 原点云换一个角度 原点云是一个复杂的铸件,通过RANSAC法拟合平面将铸件点云分割为许多个平面。 与PCL官网提供的接口的效果进行对比,下图为官方接口的效果,可以看出自己复现的算法与官方提