本文主要是介绍随机采样一致性识别模型 Ransac,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
pclpy 随机采样一致性识别模型 Ransac
- 一、算法原理
- 1.背景
- 2.运行说明
- 1.显示带异常值的平面点云
- 2.显示根据平面模型的随机采样一致性得到的平面点云
- 3.显示带异常值的球形点云
- 4.显示根据球形模型的随机采样一致性得到的球形点云
- 二、代码
- 三、结果
- 1.显示带异常值的平面点云
- 2.显示根据平面模型的随机采样一致性得到的平面点云
- 3.显示带异常值的球形点云
- 4.显示根据球形模型的随机采样一致性得到的球形点云
- 四、相关数据
一、算法原理
1.背景
“RANdom SAmple Consensus”的缩写是RANSAC,它是一种迭代方法,用于从包含异常值的一组数据中估计数学模型的参数。该算法由 Fischler 和 Bolles 于 1981 年发布。 RANSAC 算法假设我们正在查看的所有数据都包含内部值和异常值。Inliers 可以通过具有一组特定参数值的模型来解释,而异常值在任何情况下都不适合该模型。另一个必要的假设是有一个程序可以从数据中最佳地估计所选模型的参数。
来自[维基百科]:
RANSAC 算法的输入是一组观测数据值、一个可以解释或拟合观测的参数化模型,以及一些置信参数。
RANSAC 通过迭代选择原始数据的随机子集来实现其目标。这些数据是假设的内点,然后按如下方式测试该假设:
- 模型被拟合到假设的内点,即模型的所有自由参数都是从内点重建的。
- 然后针对拟合模型测试所有其他数据,如果某个点与估计模型拟合良好,则也将其视为假设的内点。
- 如果足够多的点被归类为假设的内点,则估计模型相当好。
- 该模型是从所有假设的内点重新估计的,因为它只是从初始的假设内点集估计出来的。
- 最后,通过估计内点相对于模型的误差来评估模型。
这个过程重复固定的次数,每次都会产生一个模型,因为太少的点被归类为内点而被拒绝,或者是一个带有相应误差度量的精炼模型。在后一种情况下,如果其误差低于上次保存的模型,我们将保留精度最高的模型。
…
RANSAC 的一个优点是它能够对模型参数进行鲁棒估计,即,即使数据集中存在大量异常值,它也可以高度准确地估计参数。RANSAC 的一个缺点是计算这些参数所需的时间没有上限。当计算的迭代次数有限时,获得的解可能不是最佳的,甚至可能不是很好地拟合数据的解。通过这种方式,RANSAC 提供了一种权衡;通过计算更多的迭代次数,可以增加生成合理模型的概率。RANSAC 的另一个缺点是它需要设置特定于问题的阈值。
RANSAC 只能为特定数据集估计一个模型。对于存在两个(或更多)模型时的任何一种模型方法,RANSAC 可能无法找到任何一个。
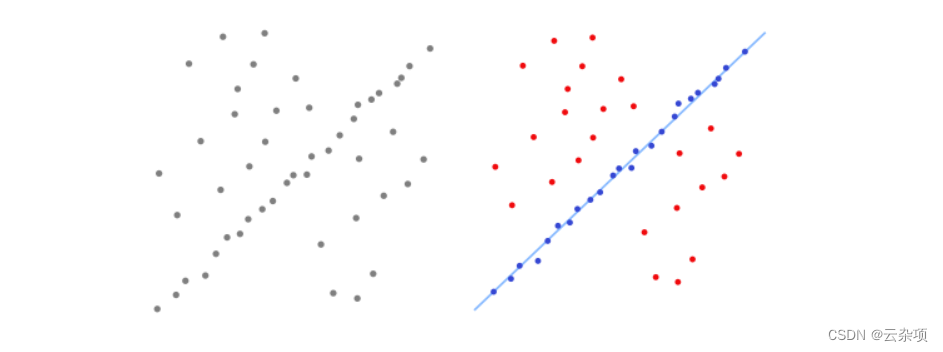
上图(来自[维基百科])显示了 RANSAC 算法在二维数据集上的简单应用。我们左边的图像是包含内部值和异常值的数据集的可视化表示。右侧的图像以红色显示所有异常值,以蓝色显示内部值。蓝线是 RANSAC 所做工作的结果。在这种情况下,我们试图拟合数据的模型是一条线,看起来它非常适合我们的数据。
2.运行说明
以下调用结果均在terminal中输入,进入函数所在路径,本项目以 Ransac.py作为处理文件
1.显示带异常值的平面点云
python .\ranscac.py -p
2.显示根据平面模型的随机采样一致性得到的平面点云
python .\ranscac.py -pf
3.显示带异常值的球形点云
python .\ranscac.py -s
4.显示根据球形模型的随机采样一致性得到的球形点云
python .\ranscac.py -sf
二、代码
from pclpy import pcl
import numpy as np
import sysdef simpleVis(cloud):"""可视化点云"""viewer = pcl.visualization.PCLVisualizer()viewer.setBackgroundColor(0, 0, 0)viewer.addPointCloud(cloud, 'sample cloud')viewer.setPointCloudRenderingProperties(0, 3, 'sample cloud')viewer.initCameraParameters()return viewerdef printUsage(program):print('Usage:', program, ' [options]\n',"Options:\n","-------------------------------------------\n","-p 显示带异常值的平面点云\n","-s 显示带异常值的球形点云\n","-pf 显示根据平面模型的随机采样一致性得到的平面点云\n","-sf 显示根据球形模型的随机采样一致性得到的球形点云\n",)if __name__ == '__main__':# 生成点云数据cloud = pcl.PointCloud.PointXYZ()final = pcl.PointCloud.PointXYZ()size = 500point = pcl.point_types.PointXYZ()# 设置点云数据 (直接换成自己的点云即可)if len(sys.argv) == 1: # 当输入错误是printUsage(sys.argv[0])exit()elif sys.argv[1] == '-p' or sys.argv[1] == '-pf':for i in range(size):point.x = np.random.rand() * 1024point.y = np.random.rand() * 1024if i % 5 == 0:point.z = np.random.rand() * 1024 # 1/5的外点else:point.z = -(point.x + point.y) # 剩下的是平面z=-(x+y)上的点cloud.push_back(point) # 将点云给与cloudelif sys.argv[1] == '-s' or sys.argv[1] == '-sf': # 平面点云for i in range(size):point.x = np.random.rand() * 1024point.y = np.random.rand() * 1024if i % 5 == 0:point.z = np.random.rand() * 1024 # 1/5的外点elif i % 2 == 0:point.z = np.sqrt(np.fabs(1024 ** 2 - point.x ** 2 - point.y ** 2)) # 剩下的是圆x^2+y^2+z^2=1024^2上的点else:point.z = -np.sqrt(np.fabs(1024 ** 2 - point.x ** 2 - point.y ** 2))cloud.push_back(point)else:printUsage(sys.argv[0])exit()inliers = pcl.vectors.Int()# 创建随机采样一致性实例并计算估计模型model_s = pcl.sample_consensus.SampleConsensusModelSphere.PointXYZ(cloud)model_p = pcl.sample_consensus.SampleConsensusModelPlane.PointXYZ(cloud)if sys.argv[1] == '-pf': # Ransac使用拟合ransac = pcl.sample_consensus.RandomSampleConsensus.PointXYZ(model_p)ransac.setDistanceThreshold(0.01) # 设置距离阈值ransac.computeModel()ransac.getInliers(inliers)elif sys.argv[1] == '-sf': # Ransac使用拟合ransac = pcl.sample_consensus.RandomSampleConsensus.PointXYZ(model_s)ransac.setDistanceThreshold(0.01) # 设置距离阈值ransac.computeModel()ransac.getInliers(inliers)# 将所有通过模型计算的内点复制到另外一个点云 pclpy中未完成copyPointCloud函数extract = pcl.filters.ExtractIndices.PointXYZ()extract.setInputCloud(cloud)extract.setIndices(inliers)extract.setNegative(False)extract.filter(final)viewer = Noneif sys.argv[1] == '-p' or sys.argv[1] == '-s': # 可视化显示带异常值点云viewer = simpleVis(cloud)elif sys.argv[1] == '-pf' or sys.argv[1] == '-sf': # 根据平面模型的随机采样一致性viewer = simpleVis(final)while not viewer.wasStopped():viewer.spinOnce(10)
三、结果
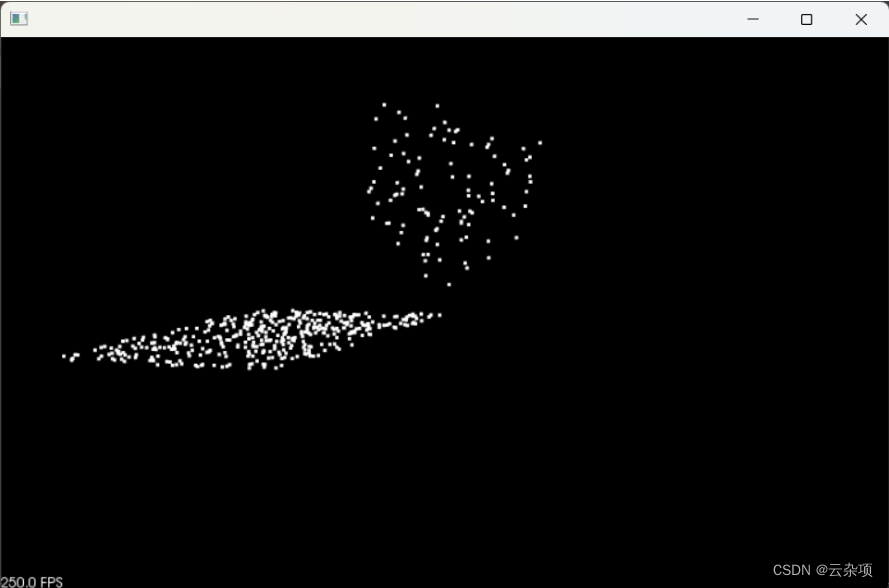
1.显示带异常值的平面点云
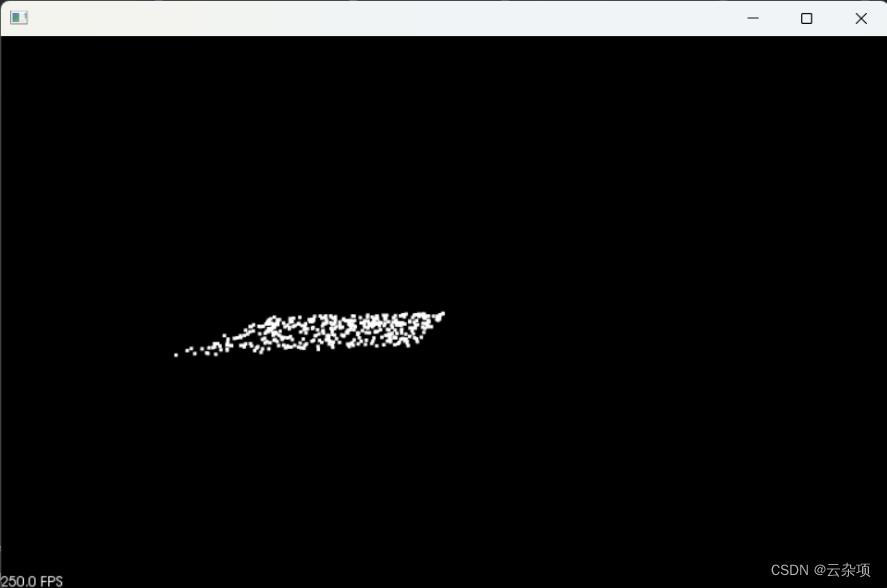
2.显示根据平面模型的随机采样一致性得到的平面点云
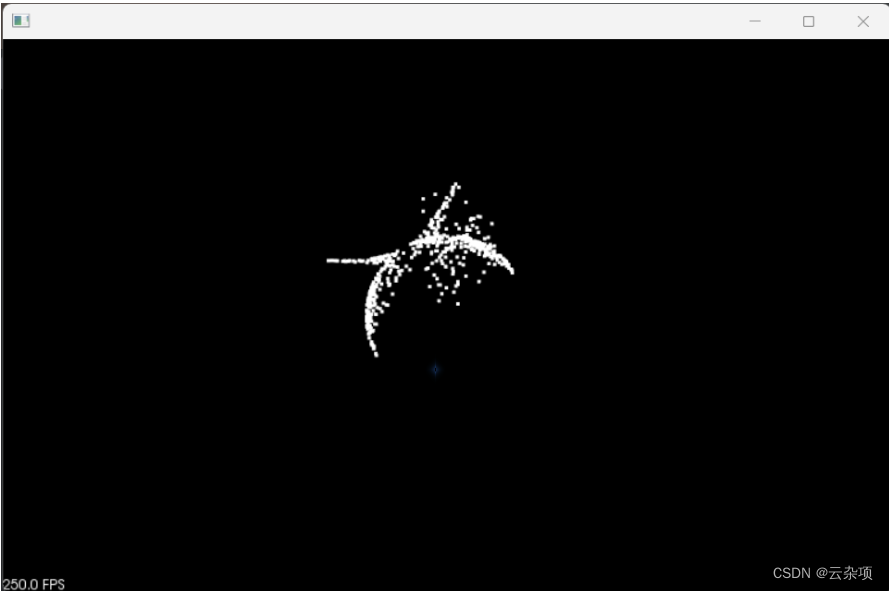
3.显示带异常值的球形点云
4.显示根据球形模型的随机采样一致性得到的球形点云
四、相关数据
open3d 平面分割(Ransac算法 :open3d 平面分割(Ransac算法)-CSDN博客
这篇关于随机采样一致性识别模型 Ransac的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




