publisher专题

用C++编写一个简单的Publisher和Subscriber
1.创建Publisher Node roscd beginner_tutorials 创建src/talker.cpp文件,内容如下(可从https://raw.github.com/ros/ros_tutorials/kinetic-devel/roscpp_tutorials/talker/talker.cpp获取源码): #include "ros/ros.h"
ROS——publisher、subscriber的实现
发布、订阅关系架构 创建发布者代码 通过CMakeList设置代码编译规则 add_executable(velocity_publisher src/velocity_publisher.cpp)target_link_libraries(velocity_publisher ${catkin_LIBRARIES}) Velocity Velocity这个词有多重含义,具体

RabbitMQ-工作模式(Topics模式RPC模式Publisher Confirms模式)
文章目录 Topics模式topic代码示例 RPC模式客户端界面回调队列关联ID总结RPC代码示例 Publisher Confirms模式概述在通道上启用发布者确认单独发布消息批量发布消息异步处理发布者确认总结总体代码示例 更多相关内容可查看 Topics模式 在Topics中,发送的消息不能具有任意的路由键 - 它必须是由点分隔的单词列表。这些单词可以是任何内容

ROS1快速入门学习笔记 - 05发布者Publisher编程的实现
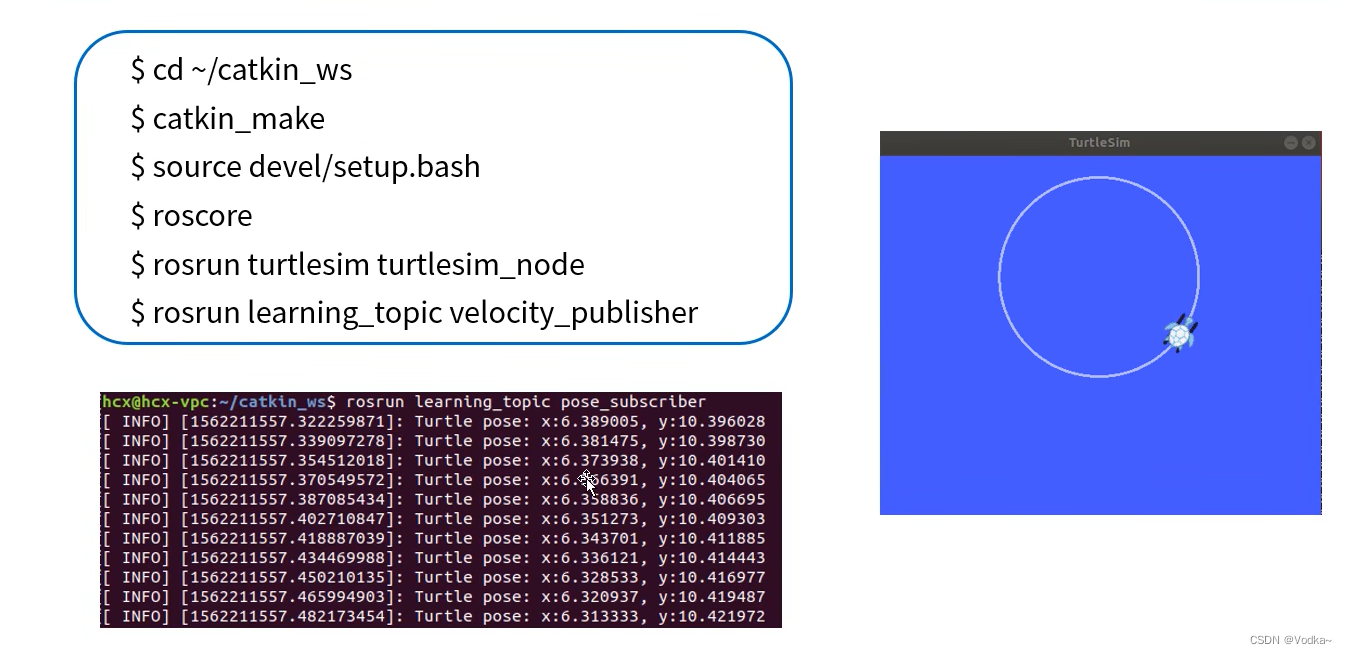
目录 一、话题模型(发布/订阅) 二、实现步骤 1. 创建一个功能包 2. C++代码的实现 3. 配置发布者代码编译规则 4. 编译并运行发布者 5. Python代码的实现 一、话题模型(发布/订阅) 二、实现步骤 1. 创建一个功能包 $ cd~/catkin_ws/src$ catkin_create_pkg learning_topic ros
【写一个简单的 publisher and subscriber (C++)例子】
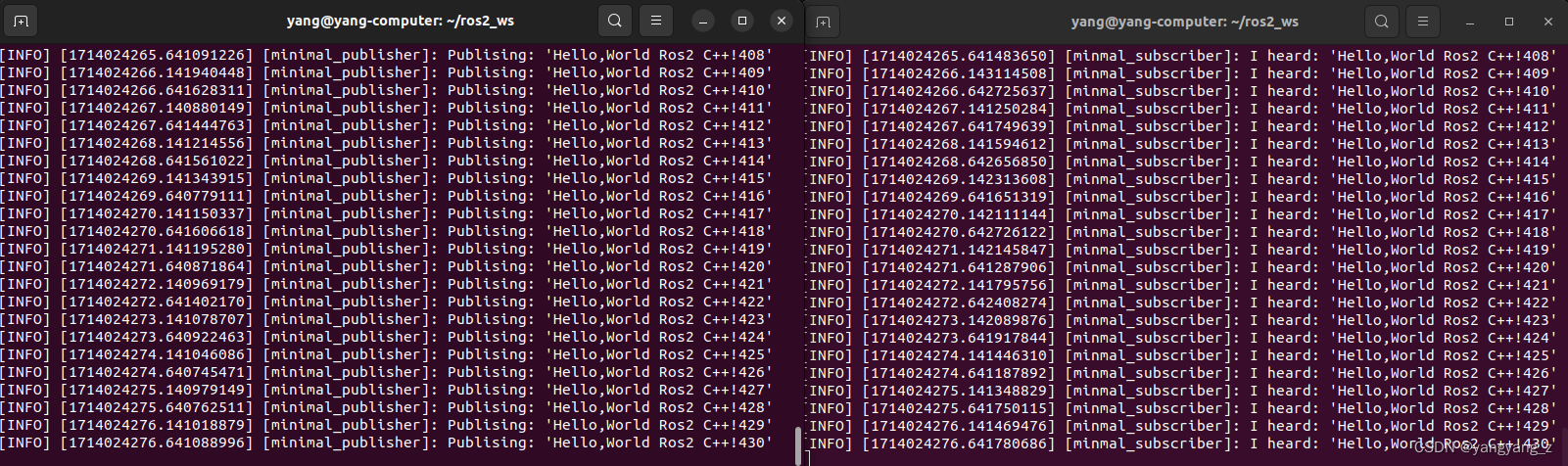
文章目录 1、概要2、引言3、主题开始的地方及步骤3.1 创建工作空间3.2 创建功能包3.3 编写publisher节点3.3.1 添加依赖项3.3.2 CMakeLists.txt 3.4 编写subscriber节点3.4.1 CMakeLists.txt 3.5 编译运行3.6 运行结果 1、概要 目标:使用 C++ 创建并运行发布者和订阅者节点 ROS 2 将复杂

Swift Publisher 5 for mac:打造精美版面
Swift Publisher 5 for mac:打造精美版面 Swift Publisher 5是一款专业的版面设计和编辑工具,为Mac用户提供了强大的设计功能和直观的操作界面。以下是关于Swift Publisher 5的功能介绍: 直观易用的界面:用户能够轻松地使用Swift Publisher 5中的工具进行排版和设计。它提供了丰富的模板和主题,以及自定义选项,使得设计更加独

Microsoft Office Publisher 2007 For Dummies
版权声明:原创作品,允许转载,转载时请务必以超链接形式标明文章原始出版、作者信息和本声明。否则将追究法律责任。 http://blog.csdn.net/topmvp - topmvp Microsoft Publisher 2007 For Dummies is a 50-75% revision to Microsoft Publisher 2000 For Dummies, cove
Reactor 3 (3): 创建Publisher之Flux
创建Flux 上一篇介绍了Mono,mono表示0~1的序列,flux用来表示0~N个元素序列,mono是flux的简化版,flux可以用来表示流 因为是表示连续序列Flux和Mono的创建方法,有些不同,下面是flux的一些创建方法: just():可以指定序列中包含的全部元素。range(): 可以用来创建连续数值empty():创建一个不包含任何元素。error(Throwable e

Publisher的消息确认机制
在前面的文章中提到了queue和consumer之间的消息确认机制:通过设置ack。那么Publisher能不到知道他post的Message有没有到达queue,甚至更近一步,是否被某个Consumer处理呢?毕竟对于一些非常重要的数据,可能Publisher需要确认某个消息已经被正确处理。 在我们的系统中,我们没有是实现这种确认,也就是说,不管Message是否被Co
ROS error: Could not find the GUI, install the ‘joint_state_publisher_gui‘ package
ROS melodic运行urdf模型时碰到, [ WARN] [1645792286.082081404]: The 'state_publisher' executable is deprecated. Please use 'robot_state_publisher' instead [WARN] [1645792286.343040]: The 'use_gui' parameter
Affinity Publisher:你的出版利器,让创意绽放光彩!mac/win版
Affinity Publisher是一款功能强大的桌面出版软件,专为专业出版人员、设计师和印前专家设计。它提供了从构思到印刷的完整工作流程,让用户能够轻松创建高质量的出版物,包括杂志、书籍、小册子、海报等。 Affinity Publisher软件获取 Affinity Publisher具有直观且用户友好的界面,使得即使是没有出版经验的用户也能快速上手。软件内置了丰富的排版工具、图像编辑功
CruiseControl Enterprise 最佳实践 (1) : Publish with a Publisher
2007年10月12日 01:09:00 ?Copyright 2007 Julian Simpson. All rights reserved. 英文原文: CruiseControl Enterprise: 10 Best Practices I'm an Infrastructure Specialist at ThoughtWorks. In my role I make
第 5 课 编写简单的发布器 Publisher
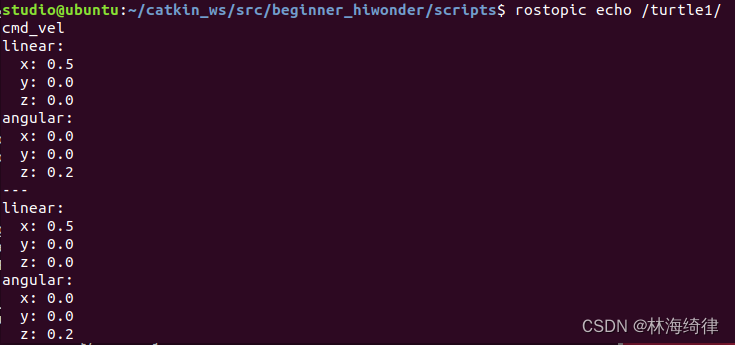
文章目录 第 5 课 编写简单的发布器 Publisher 第 5 课 编写简单的发布器 Publisher 本节以创建一个velocity_publisher.py的(发布者)节点为例进行讲解。 输入指令“roscd beginner_hiwonder”,回车。进入beginner_hiwonder软件包。 roscd:移动到指定的 ROS 功能包目录 输入指令“mkd
![关于joint_state_publisher出现No transform from [sth] to [sth]的问题](https://img-blog.csdnimg.cn/20200705180112280.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L0phYmJlcl9KYWdnZXI=,size_16,color_FFFFFF,t_70)
关于joint_state_publisher出现No transform from [sth] to [sth]的问题
问题描述: https://www.cnblogs.com/dayspring/articles/10109260.html "robot_description" 参数定义了urdf文件的路径,它被 robot_state_publisher节点使用。该节点解析urdf文件后将各个frame的状态发布给tf. 因此在rviz里面就看到各个frame(link)之间的tf转换显示OK.否则
关于joint_state_publisher与robot_state_publisher安装
ros2完整版自带robot_state_publisher,但是没有joint_state_publisher安装包,所以如果需要这2个包的话,只需要安装joint_state_publisher就可以了,下载方式:我采用源码安装: sudo git clone -b ros2 https://gitee.com/geniuschinahn/joint_state_publisher.git

tf static_transform_publisher的物理意义
static_transform_publisher发布的是父系到子系的坐标系变换,即,将父系变化得到子系的方法。 一个例子: <node pkg="tf" type="static_transform_publisher" name="base_link1_to_camera" args="1 0 0 1.570795 0 0 /camera /b1 10" /><no
![[robot_state_publisher-3] Error: Error document empty.](https://img-blog.csdnimg.cn/direct/0d0ad0b8db7f48a781c338dd0269b488.png)
[robot_state_publisher-3] Error: Error document empty.
出现这个问题,我这里遇到的是:指定的urdf文件路径无效,而产生这个的根本原因是没有在CMakelists.txt中添加如下代码: install( DIRECTORY urdf DESTINATION share/${PROJECT_NAME} )把urdf文件夹添加到指定的share/${PROJECT_NAME}目录
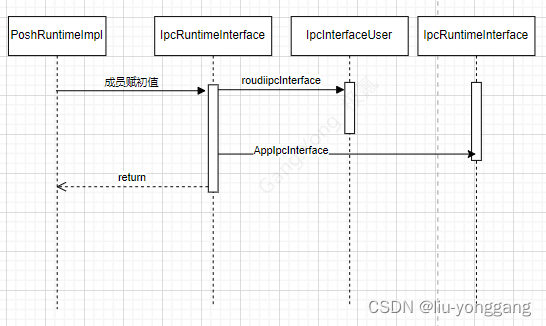
iceoryx(冰羚)-publisher注册RouDi进程
1、发UserApp启动,发布REG消息过程 2、初始化状态转换 3、pub->RouDi 4、sub->RouDi 5、IPC通信 IPC通信支持socket和管道,IpcInterfaceUser ->RouDi进程的socket, IpcInterfaceCreator接收RouDi进程的消息socket。 optional<IpcInterfaceCreator> m_App
![ROS自学笔记二十八:ERROR: cannot launch node of type [robot_state_publisher/state_publisher]解决方法](https://img-blog.csdnimg.cn/63e376f9796f4ab5966dc3fd8fed199f.png)
ROS自学笔记二十八:ERROR: cannot launch node of type [robot_state_publisher/state_publisher]解决方法
最近学习ros出现这个问题 ERROR: cannot launch node of type [robot_state_publisher/state_publisher]: Cannot locate node of type [state_publisher] in package [robot_state_publisher]. Make sure file exists in pack
![[Mac/Windows] Affinity Publisher | 正品序列号 | 专业的桌面出版工具](https://img-blog.csdnimg.cn/20190630223245947.jpg)
[Mac/Windows] Affinity Publisher | 正品序列号 | 专业的桌面出版工具
[Mac/Windows] Affinity Publisher | 正品序列号 | 点击打开查看
![[joint_state_publisher-3] process has died,最新遇到的问题,基于ROS melodic版本](https://img-blog.csdnimg.cn/7b1e02c02b054e318fdc163a9cccb8cb.png)
[joint_state_publisher-3] process has died,最新遇到的问题,基于ROS melodic版本
如下图所示,这是我遇到的是这样的情况: 解决思路: 1、先确定是否安装了joint_state_publisher_gui,没有的话用下面的命令行:sudo apt-get install ros-xxx-joint-state-publisher-gui 因为我的版本是melodic,所以xxx是填melodic,其他同学的填自己电脑的版本即可 2、确保urdf文件的首行不能是注释;
![ROS学习 [joint_state_publisher-2] process has died](https://img-blog.csdnimg.cn/fbe594e95dab4a3e9a3481e9a6acaa83.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAcXFfMTUwNTUxNDM=,size_12,color_FFFFFF,t_70,g_se,x_16)
ros1 基础学习04- 自定义Publisher消息编程实现示例
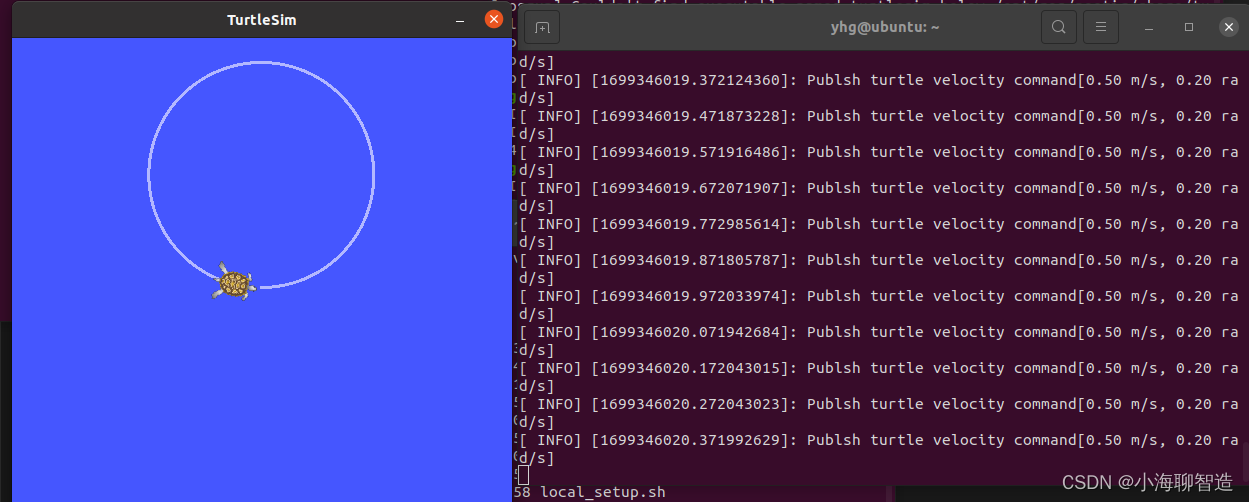
整理步骤 cd进入工作空间下的代码空间, 创建功能包,并配置依赖 在功能包里面的代码空间里编写C++代码文件 在cmakelist文件里面配置编译规则 cd到工作空间,编译工作空间,source设置环境变量 打开roscore, 运行海龟仿真节点,运行功能包里发布者的节点 话题模型 1. 创建功能包 cd ~/catkin_ws/src catkin_create_pkg lea
GEE——Publisher Data Catalogs发布者数据目录
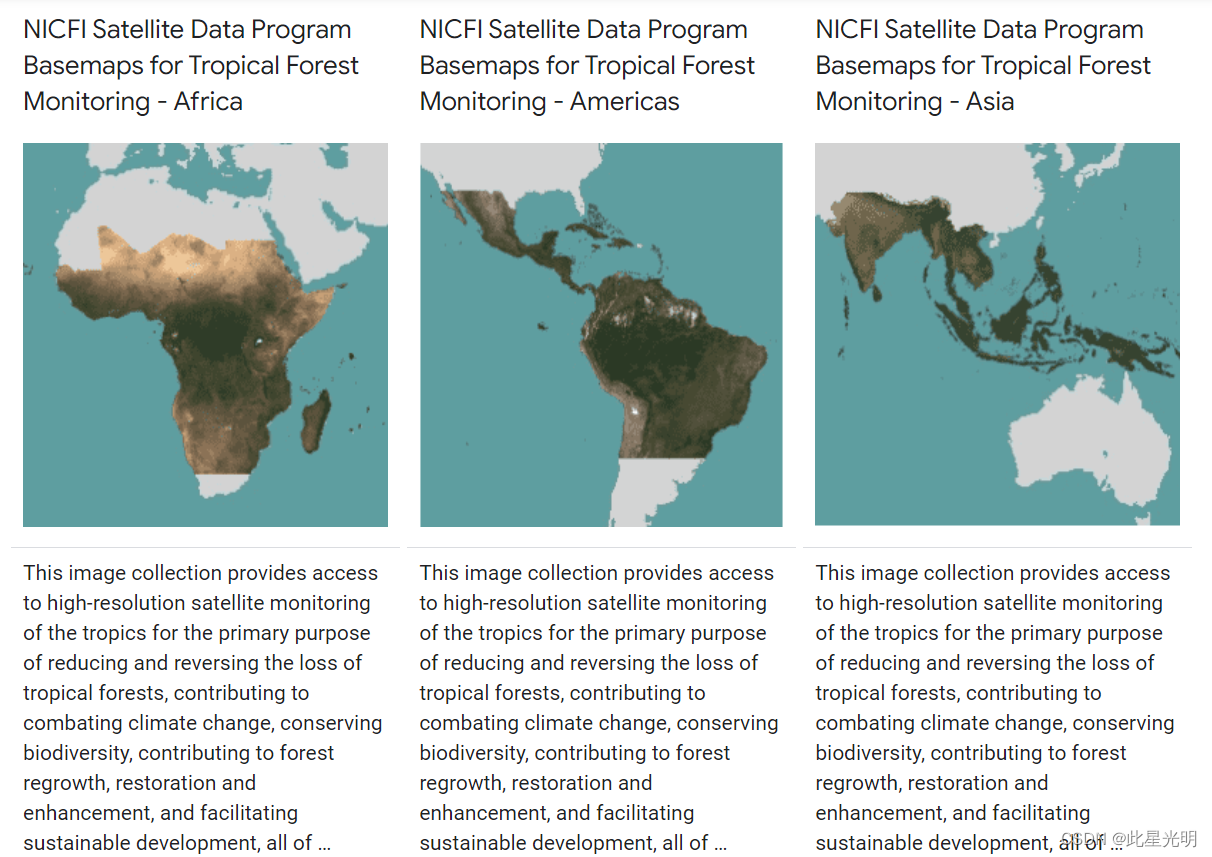
发布者数据目录 发布者数据目录由数据集发布者策划,供更大范围的 Google 地球引擎社区使用,并作为地球引擎资产集公开共享。这些目录并非由 Google 编制。这里是GEE团队简政放权的一个过程,也就是说这些数据集的后续更新和维护并不由GEE团队负责。也就是后续这个数据集是否更新和运营都不和GEE有什么瓜葛。前言 – 人工智能教程 https://developers.google.com/e
ros::init ros::NodeHandle ros::Subscriber ros::Publisher他们之间是如何联系和工作的?
ros::init, ros::NodeHandle, ros::Subscriber, 和 ros::Publisher 是ROS中C++ API的核心组件。以下是关于它们的描述及其内在关系: ros::init: 作用:初始化ROS的客户端库。你通常在你的ROS节点的主函数(main)开始处调用它,来初始化节点并与roscore进行连接。 ros::NodeHandle: 作用:是一个接

XML Publisher RTF模版开发技巧
Template Builder->Preview->RTF Tag-Group Template 的建立过程中, Group 的概念很重要。 Group :一笔资料就是为一个 group. Group 可以嵌套循环。 例如:一张 PO 的资料包括 header 和 line 两部分。可以把这两部分 Header 和 Line 的资料看成是一个 Group ,同时也可以把