本文主要是介绍【写一个简单的 publisher and subscriber (C++)例子】,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1、概要
- 2、引言
- 3、主题开始的地方及步骤
- 3.1 创建工作空间
- 3.2 创建功能包
- 3.3 编写publisher节点
- 3.3.1 添加依赖项
- 3.3.2 CMakeLists.txt
- 3.4 编写subscriber节点
- 3.4.1 CMakeLists.txt
- 3.5 编译运行
- 3.6 运行结果
1、概要
目标:使用 C++ 创建并运行发布者和订阅者节点
- ROS 2 将复杂系统分解为许多模块化节点。
- 主题是ROS图的重要组成部分,充当节点交换消息的总线。
- 一个节点可以将数据发布到任意数量的主题,并同时订阅任意数量的主题。
2、引言
节点是通过 ROS 图进行通信的可执行进程。节点将通过一个主题以字符串消息的形式相互传递信息。这里使用的示例是一个简单的“说话者”和“倾听者”系统;一个节点发布数据,另一个节点订阅主题,以便它可以接收该数据。
3、主题开始的地方及步骤
3.1 创建工作空间
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws/src
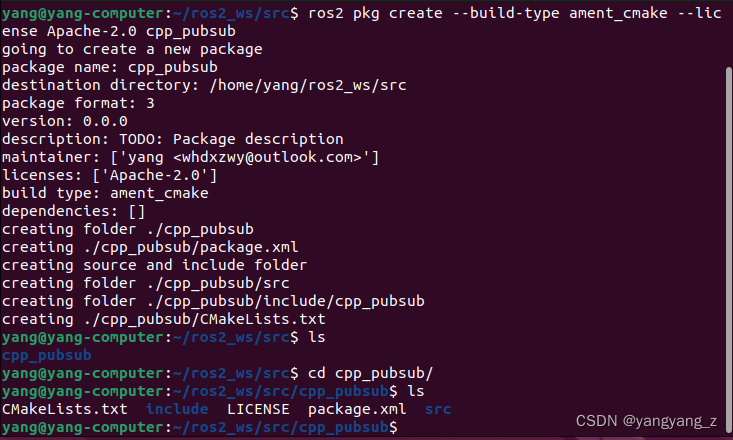
3.2 创建功能包
ros2 pkg create --build-type ament_cmake --license Apache-2.0 cpp_pubsub
3.3 编写publisher节点
cd ~/ros2_ws/src/cpp_pubsub/src
vim publisher_member_function.cpp
publisher_member_function.cpp 代码
#include<chrono>
#include<functional>
#include<memory>
#include<string>#include"rclcpp/rclcpp.hpp"
#include"std_msgs/msg/string.hpp"using namespace std::chrono_literals;/* 创建一个 Node 的子类,并使用 std::bind() 将成员函数注册为计时器的回调。*/class MinimalPublisher:public rclcpp::Node
{
public://构造函数初始化MinimalPublisher():Node("minimal_publisher"),count_(0){publisher_ = this->create_publisher<std_msgs::msg::String>("topic",10);timer_ = this->create_wall_timer(500ms,std::bind(&MinimalPublisher::timer_callback,this));}
private:void timer_callback(){auto message = std_msgs::msg::String();message.data = "Hello,World Ros2 C++!" + std::to_string(count_++);RCLCPP_INFO(this->get_logger(),"Publising: '%s'",message.data.c_str());publisher_->publish(message);}rclcpp::TimerBase::SharedPtr timer_;rclcpp::Publisher<std_msgs::msg::String>::SharedPtr publisher_;size_t count_;
};int main(int argc,char* argv[])
{rclcpp::init(argc,argv);rclcpp::spin(std::make_shared<MinimalPublisher>());rclcpp::shutdown();return 0;
}
3.3.1 添加依赖项
- 进入到
ros2_ws/src/cpp_pubsub目录,其中已创建CMakeLists.txt和package.xml文件。 - 使用文本编辑器打开
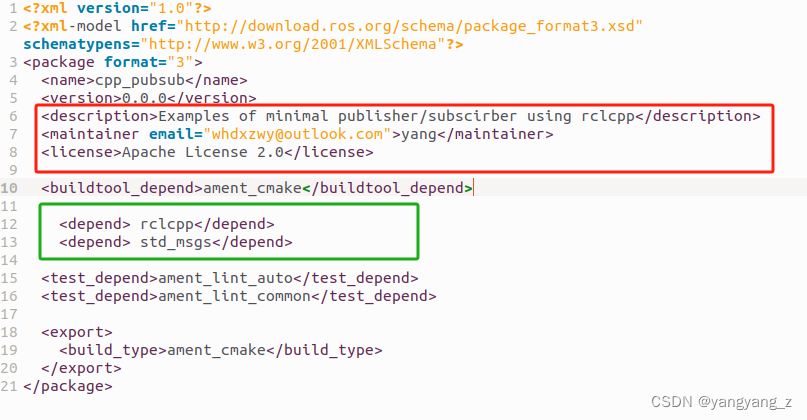
package.xml。 - 填写
<description>, <maintainer> and <license>标记
<description>Examples of minimal publisher/subscirber using rclcpp</description>
<maintainer email="you@outlook.com">youname</maintainer>
<license>Apache License 2.0</license>
- 在
<buildtool_depend>ament_cmake</buildtool_depend>依赖项后添加一个新行,并粘贴与节点的 包含语句对应的以下依赖项:
<depend>rclcpp</depend>
<depend>std_msgs</depend>
这声明包在生成和执行其代码时需要 rclcpp 和 std_msgs
3.3.2 CMakeLists.txt
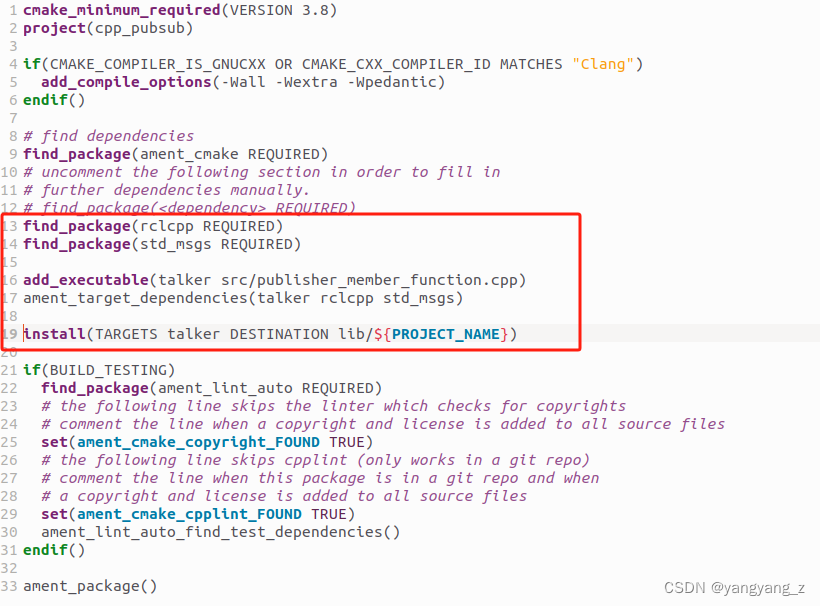
- 打开CMakeLists.txt文件。在现有依赖项
find_package(ament_cmake REQUIRED)下面,添加以下行:
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
- 添加可执行文件并将其命名为 talker,以便可以使用 ros2 run 运行节点
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
- 添加 install(TARGETS…) 部分,以便 ros2 run 可以找到可执行文件:
install(TARGETS talker DESTINATION lib/${PROJECT_NAME})
3.4 编写subscriber节点
cd ~/ros2_ws/src/cpp_pubsub/src
vim subscriber_member_function.cpp
subscriber_member_function.cpp 代码
#include<memory>#include"rclcpp/rclcpp.hpp"
#include"std_msgs/msg/string.hpp"using std::placeholders::_1;class MinimalSubscriber:public rclcpp::Node
{
public:MinimalSubscriber():Node("minmal_subscriber"){subscription_ = this->create_subscription<std_msgs::msg::String>("topic",10,std::bind(&MinimalSubscriber::topic_callback,this,_1));}
private:void topic_callback(const std_msgs::msg::String& msg)const{RCLCPP_INFO(this->get_logger(),"I heard: '%s'",msg.data.c_str());}rclcpp::Subscription<std_msgs::msg::String>::SharedPtr subscription_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<MinimalSubscriber>());rclcpp::shutdown();return 0;
}3.4.1 CMakeLists.txt
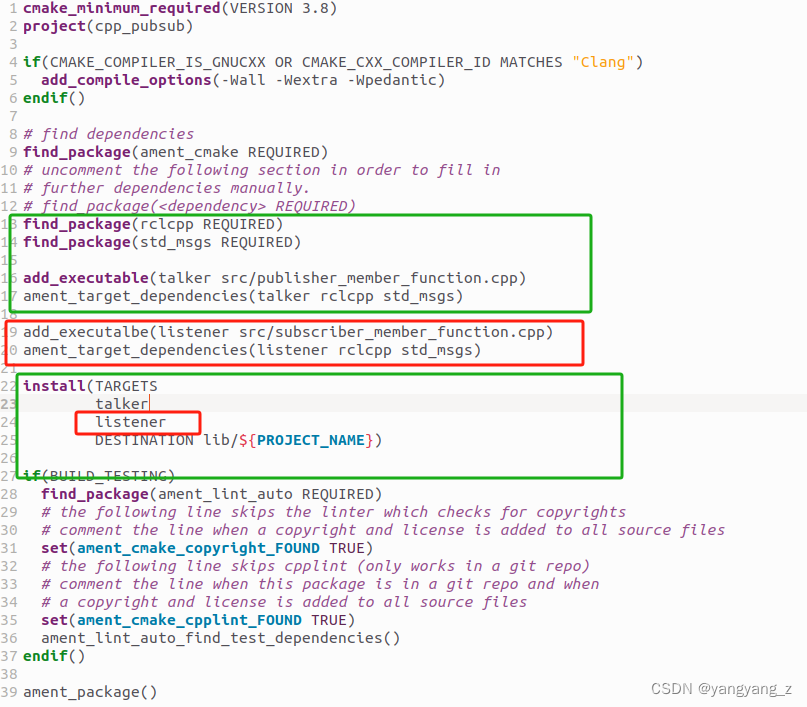
- 重新打开
CMakeLists.txt,并在发布者的条目下方添加订阅者节点的可执行文件和目标。
add_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp std_msgs)install(TARGETStalkerlistenerDESTINATION lib/${PROJECT_NAME})
3.5 编译运行
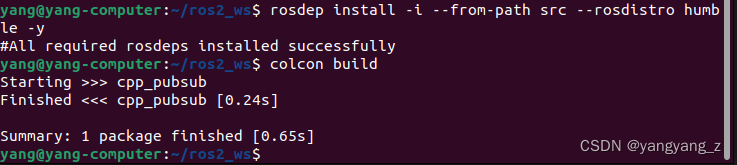
- 可能已经安装了 rclcpp 和 std_msgs 软件包作为 ROS 2 系统的一部分。在构建之前,最好在工作区 (ros2_ws) 的根目录中运行 rosdep 以检查缺少的依赖项:
rosdep install -i --from-path src --rosdistro humble -y
- 仍然在工作区的根目录中,ros2_ws,生成新包:
colcon build --packages-select cpp_pubsub
3.6 运行结果
- 打开一个新终端,导航到ros2_ws,并获取安装文件:
. install/setup.bash
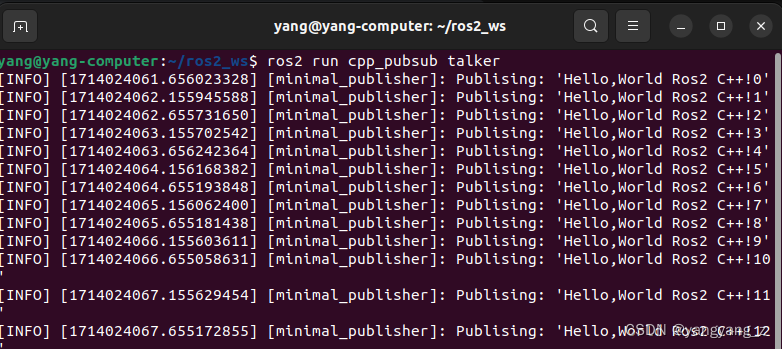
- 运行talker节点
. install/setup.bash
ros2 run cpp_pubsub talker
- 打开另一个终端,进入ros2_ws的工作空间下,运行listener节点
. install/setup.bash
ros2 run cpp_pubsub listener
主题Topic通信,发布者和订阅者
这篇关于【写一个简单的 publisher and subscriber (C++)例子】的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






