subscriber专题

用C++编写一个简单的Publisher和Subscriber
1.创建Publisher Node roscd beginner_tutorials 创建src/talker.cpp文件,内容如下(可从https://raw.github.com/ros/ros_tutorials/kinetic-devel/roscpp_tutorials/talker/talker.cpp获取源码): #include "ros/ros.h"
ROS——publisher、subscriber的实现
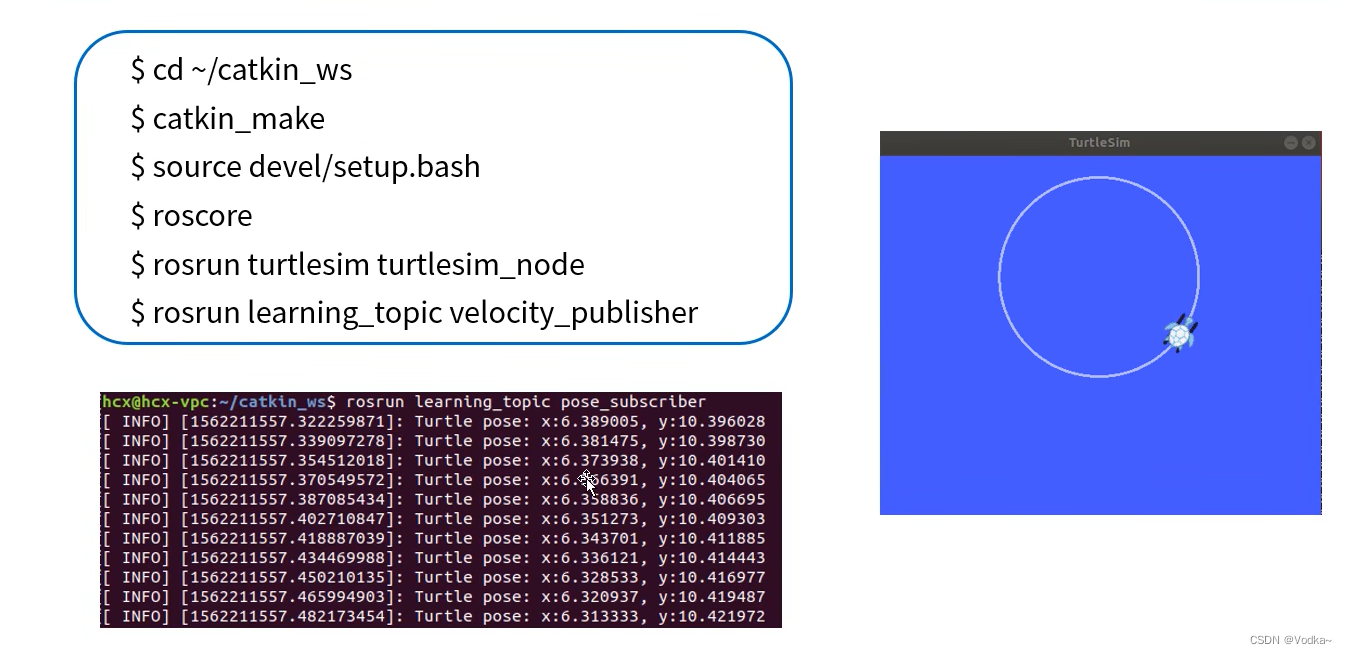
发布、订阅关系架构 创建发布者代码 通过CMakeList设置代码编译规则 add_executable(velocity_publisher src/velocity_publisher.cpp)target_link_libraries(velocity_publisher ${catkin_LIBRARIES}) Velocity Velocity这个词有多重含义,具体
【写一个简单的 publisher and subscriber (C++)例子】
文章目录 1、概要2、引言3、主题开始的地方及步骤3.1 创建工作空间3.2 创建功能包3.3 编写publisher节点3.3.1 添加依赖项3.3.2 CMakeLists.txt 3.4 编写subscriber节点3.4.1 CMakeLists.txt 3.5 编译运行3.6 运行结果 1、概要 目标:使用 C++ 创建并运行发布者和订阅者节点 ROS 2 将复杂
ROS第 6 课 编写简单的订阅器 Subscriber
文章目录 第 6 课 编写简单的订阅器 Subscriber1. 编写订阅者节点2. 测试发布者和订阅者 第 6 课 编写简单的订阅器 Subscriber 订阅器是基于编辑了发布器的基础上创建的,只有发布了消息,才有可能订阅。若未编辑发布器,可前往"ROS第5课 编辑简单的发布器Publisher”查看编辑教程。 1. 编写订阅者节点 这里我们以创建一个的pose_s
EventBus之Subscriber Index
Subscriber Index 订阅者索引是EventBus 3的一个新特性。这是一个可选的优化,以加快初始订阅者注册。 Subscriber Index在编译时(build time)使用EventBus注解处理器(annotation processor)创建。虽然不是必须要使用索引,但建议在Android上使用索引以获得最佳性能。 Index Preconditions 注意,只能
ReactiveCocoa框架菜鸟入门(三)——信号(Signal)与订阅者(Subscriber)
写在开始前 传统的编程思想,大概是用户产生某个事件,然后得到相应的参数,传入事先已经实现的方法中,处理完成后把结果在UI界面上反馈出来。ReactiveCocoa框架中大量的使用了block,这意味着,很多block内的代码,是在将来某一个合适的时刻被执行的。如果你看到block里某个参数并没有被赋值,也没有传入参数,不要奇怪,程序运行到这里的时候还不会执行这个block,至于等到需要执行blo
ros1 自定义订阅者Subscriber的编程实现
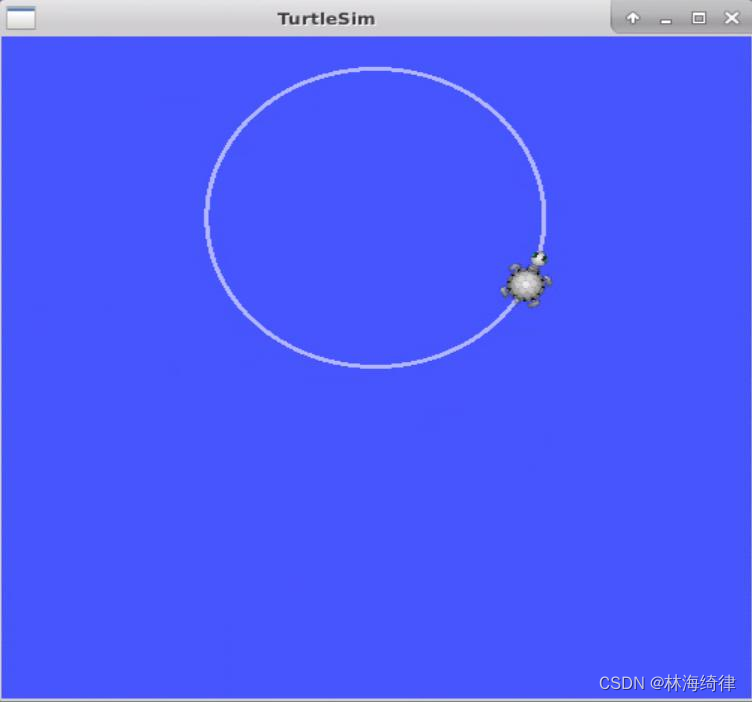
话题模型 图中,我们使用ROS Master管理节点。 有两个主要节点: Publisher,名为Turtle Velocity(即海龟的速度)Subscriber,即海龟仿真器节点 /turtlesim Publisher(Turtle Velocity),发布Message(即海龟的速度信息,以geometry_msgs::Twist的数据结构,包括线速度和角速度),通过Topic(/

EventBusException: Subscriber class *** and its super classes have no public methods with the @Subsc
简述: 去年的时候使用过一次EventBus,今天又遇到使用EventBus的项目,由于时隔一年多了所以写了一个Demo,但不行的是按照往常的用法却报出了这个异常: EventBusException: Subscriber class *** and its super classes have no public methods with the @Subscribe ann

ros::init ros::NodeHandle ros::Subscriber ros::Publisher他们之间是如何联系和工作的?
ros::init, ros::NodeHandle, ros::Subscriber, 和 ros::Publisher 是ROS中C++ API的核心组件。以下是关于它们的描述及其内在关系: ros::init: 作用:初始化ROS的客户端库。你通常在你的ROS节点的主函数(main)开始处调用它,来初始化节点并与roscore进行连接。 ros::NodeHandle: 作用:是一个接
Fast DDS之Subscriber
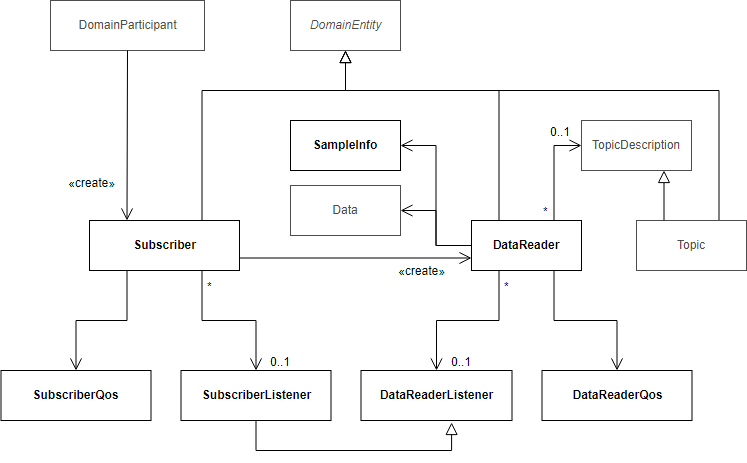
目录 SubscriberSubscriberQosSubscriberListener创建Subscriber DataReaderSampleInfo读取数据 Subscriber扮演容器的角色,里面可以有很多DataReaders,它们使用Subscriber的同一份SubscriberQos配置。Subscriber可以承载不同Topic和数据类型的DataReader对

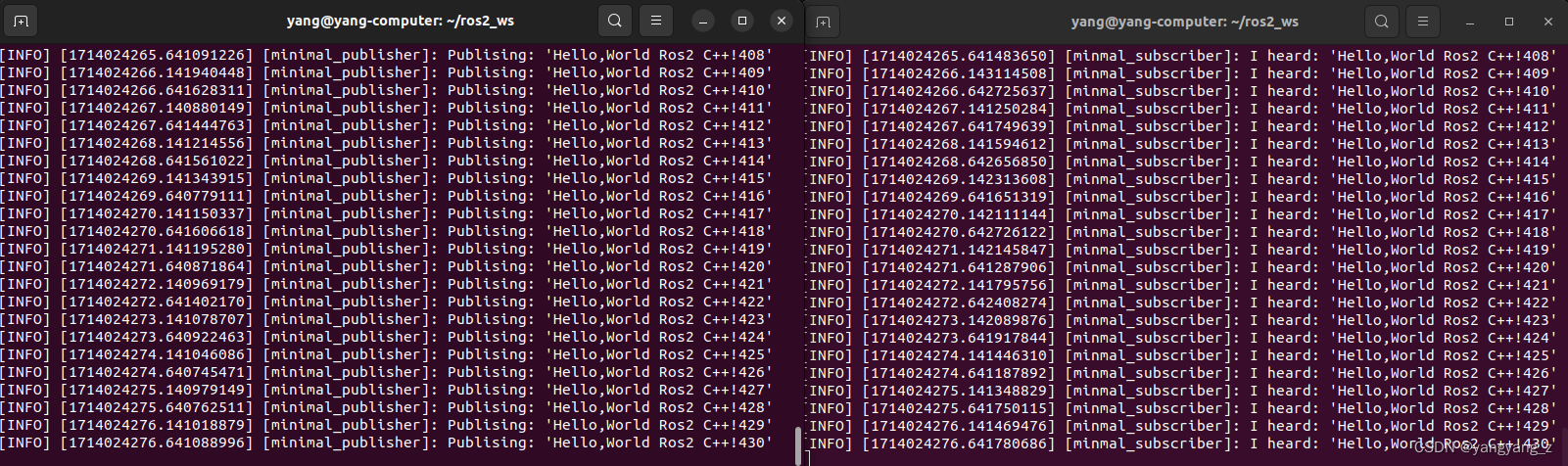
【ROS2】publisher和subscriber和延时编写规则
1、publisher 节点名 auto node = rclcpp::Node::make_shared(“publisher”); 消息类型和话题 auto pub = node->create_publisher<std_msgs::msg::String>(“/pub_sub”, 10); 发送消息 pub->publish(myMessage); //注意用-> #includ