本文主要是介绍ROS第 6 课 编写简单的订阅器 Subscriber,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 第 6 课 编写简单的订阅器 Subscriber
- 1. 编写订阅者节点
- 2. 测试发布者和订阅者
第 6 课 编写简单的订阅器 Subscriber
订阅器是基于编辑了发布器的基础上创建的,只有发布了消息,才有可能订阅。若未编辑发布器,可前往"ROS第5课 编辑简单的发布器Publisher”查看编辑教程。
1. 编写订阅者节点
这里我们以创建一个的pose_subscriber.py节点为例进行讲解。
- 输入指令“cd catkin_ws/src/beginner_hiwonder/scripts/”,回车。

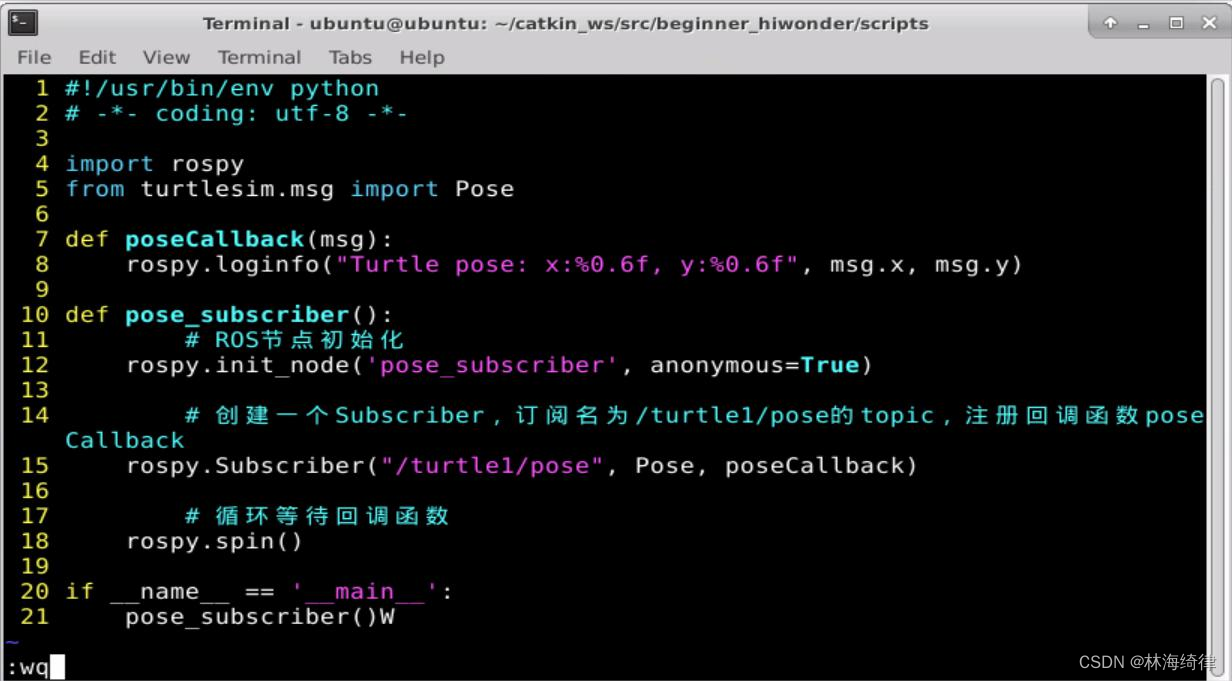
- 输入指令“vi pose_subscriber.py”编辑程序,复制下面程序。如需修改,再按下“i”即可修改。修改完成,按下“Esc”,输入“:wq”保存并退出。

#!/usr/bin/env python
# -*- coding: utf-8 -*-# 导入rospy模块,rospy是ROS(Robot Operating System)的python客户端库
import rospy
# 从turtlesim.msg模块导入Pose消息类型
from turtlesim.msg import Pose# 定义回调函数poseCallback,当收到新的Pose消息时会被调用
def poseCallback(msg):# 在ROS日志中记录乌龟的位置信息,msg.x和msg.y分别是乌龟在模拟环境中的x、y坐标rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)# 定义pose_subscriber函数,该函数设置了ROS订阅者
def pose_subscriber():# 初始化ROS节点,命名为'pose_subscriber',anonymous=True意味着ROS会自动为节点分配一个唯一的名称,防止节点名称冲突rospy.init_node('pose_subscriber', anonymous=True)# 创建一个Subscriber对象,订阅名为/turtle1/pose的topic# 当有消息发布到这个topic时,ROS会调用预先设置的回调函数poseCallbackrospy.Subscriber("/turtle1/pose", Pose, poseCallback)# rospy.spin()进入自循环,可以让程序等待并调用回调函数,直到节点被显式关闭rospy.spin()# 当该脚本作为主程序运行时,执行下面的代码
if __name__ == '__main__':# 调用pose_subscriber函数,设置订阅者pose_subscriber()
3) 输入指令“chmod +x pose_subscriber.py”回车,为保存的pose_subscriber.py赋予可执行权限。

2. 测试发布者和订阅者
- 输入指令“roscore”,启动节点管理器。

若已开启,则会出现以下提示:

- 再输入指令“rosrun turtlesim turtlesim_node”,回车,开启小乌龟。

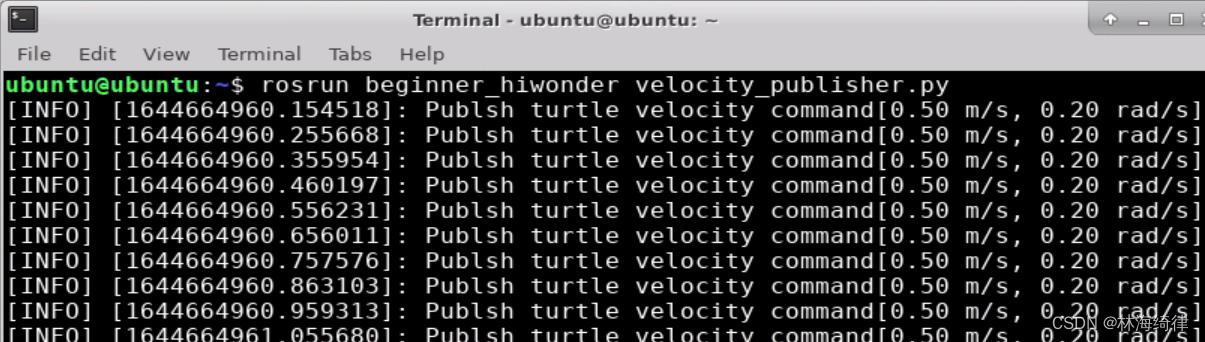
- 再打开一个新的终端,输入指令“rosrun beginner_hiwonder velocity_publisher.py”运行velocity_publisher.py的发布者。按下“Ctrl+C”即可停止发布者节点的运行。
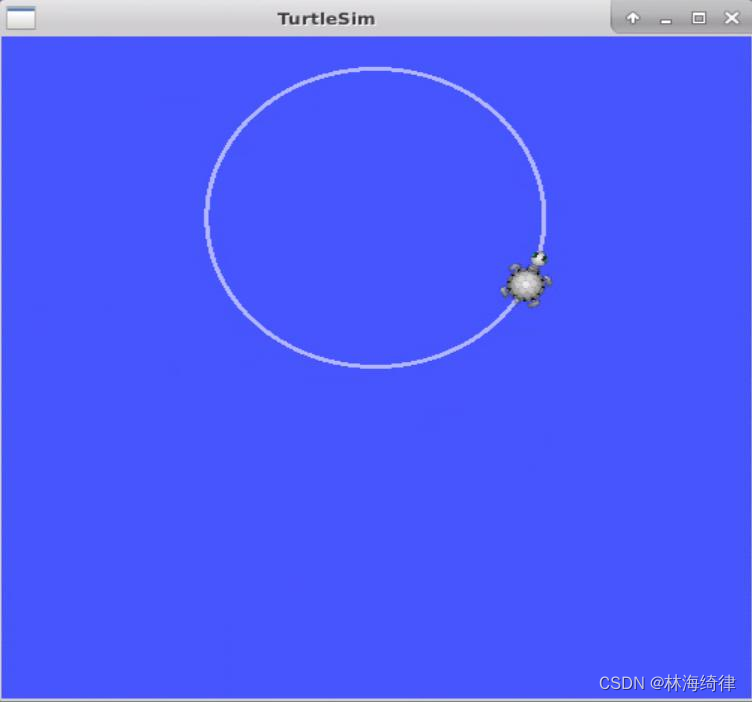
- 重新打开一个命令行终端,输入指令“rosrun beginner_hiwonder pose_subscriber.py”运行pose_subscriber.py的订阅者。按下“Ctrl+C”即可停止订阅者节点的运行。
注意:
①启动发布者节点后,订阅者节点才能订阅消息。
②若需要完全接收发布者消息,可以先启动订阅者节点再启动发布者节点。
这篇关于ROS第 6 课 编写简单的订阅器 Subscriber的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





