pcl专题


【译】PCL官网教程翻译(22):全局对齐空间分布(GASD)描述符 - Globally Aligned Spatial Distribution (GASD) descriptors
英文原文查看 全局对齐空间分布(GASD)描述符 本文描述了全局对齐的空间分布(GASD)全局描述符,用于有效的目标识别和姿态估计。 GASD基于表示对象实例的整个点云的参考系的估计,该实例用于将其与正则坐标系对齐。然后,根据对齐后的点云的三维点在空间上的分布情况计算其描述符。这种描述符还可以扩展到整个对齐点云的颜色分布。将匹配点云的全局对齐变换用于目标姿态的计算。更多信息请参见GASD。

【译】PCL官网教程翻译(21):旋转投影统计(RoPs)特征 - RoPs (Rotational Projection Statistics) feature
英文原网址查看 旋转投影统计(RoPs)特征 在本教程中,我们将学习如何使用pcl::ROPSEstimation类来提取点特性。在这门课中实现的特征提取方法是由Yulan Guo, Ferdous Sohel, Mohammed Bennamoun, Min Lu and Jianwei Wanalso在他们的文章《旋转投影统计用于三维局部表面描述和目标识别》中提出的。 理论基础 特征提

【译】PCL官网教程翻译(20):惯性矩和偏心距描述符 - Moment of inertia and eccentricity based descriptors
英文原网页查看。 基于惯性矩和偏心距的描述符 在本教程中,我们将学习如何使用pcl::MomentOfInertiaEstimation类来获得基于偏心量和惯性矩的描述符。这个类还允许提取轴对齐和有向的点云包围框。但是请记住,提取的OBB可能并不是最小的边界框。 理论基础 特征提取方法的思想如下。首先计算点云的协方差矩阵,提取点云的特征值和特征向量。可以考虑得到的特征向量是归一化的,并且总

【译】PCL官网教程翻译(19):从深度图像中提取NARF特征 - How to extract NARF Features from a range image
英文原文阅读 从深度图像中提取NARF特征 本教程演示如何从深度图像中提取位于NARF关键点位置的NARF描述符。可执行文件使我们能够从磁盘加载点云(如果没有提供,也可以创建点云),从中提取感兴趣的点,然后在这些位置计算描述符。然后,它在图像和3D查看器中可视化这些位置。 代码 首先,在您喜欢的编辑器中创建一个名为narf_feature_extract .cpp的文件,并在其中放置以下代

【译】PCL官网教程翻译(18):估计一组点的视点特征直方图(VFH)签名 - Estimating VFH signatures for a set of points
英文原文查看 估计一组点的视点特征直方图(VFH)签名 本文描述了视点特征直方图([VFH])描述符,这是一种针对聚类(如对象)识别和6DOF姿态估计问题的点簇表示方法。 下图展示了一个VFH识别和姿态估计的例子。给定一组火车数据(除最左边的点云外,最上面一行、最下面一行),学习一个模型,然后使用一个云(最左边的部分)查询/测试模型。匹配的结果按从最好到最差的顺序从左到右从左下角开始。有关更多

【译】PCL官网教程翻译(17):快速点特征直方图(FPFH)描述符 -Fast Point Feature Histograms (FPFH) descriptors
英文原文阅读 快速点特征直方图(FPFH)描述符 计算复杂度直方图(见点特征直方图(PFH)描述符)对于一个给定的有 n n n个点的点云 P P P为 O ( n k 2 ) O (nk ^ 2) O(nk2), k k k是每个点P的最邻近点个数。对于要求实时或接近实时的应用程序,密集点的特征直方图的计算效率是一个一个主要问题。 本教程描述了PFH公式的简化,称为快速点特征直方图(FPF

【译】PCL官网教程翻译(16):点特征直方图(PFH)描述符 -Point Feature Histograms (PFH) descriptors
英文原网页查看。 点特征直方图(PFH)描述符 就点特征表示而言,表面法线和曲率估计是在表示特定点周围的基本的几何形状方面。虽然计算速度极快,也很容易,但是它们不能捕捉太多的细节,因为它们只能用很少的值来近似一个点的k邻域的几何形状。直接的结果是,大多数场景将包含许多具有相同或非常相似的特征值的点,从而减少了它们的信息特征。 本教程介绍了一组为简单起见而创建的3D特征描述符PFH(点特征直方图

Ubuntu中PCL、Eigen、ROS、Ceres、VScode相关操作,安装,卸载,文件存储位置基础合集
Ubuntu中PCL相关操作 查看PCL对应的版本号 apt-cache show libpcl-dev 卸载PCL相关命令 sudo apt-get remove libpcl-dev 如果想要完全卸载相关软件包及其配置文件,需要加上--purge参数: sudo apt-get --purge remove libpcl-dev Ubuntu中eigen相关操作 ubunt
PCL 基于贪心三角化的点云网格化重建
目录 一、概述1.1 定义1.2 实现过程1.3 核心函数 二、代码示例三、结果示例 一、概述 1.1 定义 🙋 贪心三角化:是一种对原始点云进行快速三角化的算法,该算法假设曲面光滑,点云密度变化均匀,不能在三角化的同时对曲面进行平滑和孔洞修复。 1.2 实现过程 (1)先将点云通过法线投影到某一二维坐标平面内 (2)然后对投影得到的点云做平面内的三角化,从而得到各

PCL 基于八叉树获取体素邻居
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 基于一个指定的体素,通过八叉树获取该体素周围的体素点云。 二、实现代码 //标准文件#include <iostream>#include <thread>//PCL#include <pcl/common/common.h>#include
PCL滤波介绍(3)
(1)从一个点云中提取索引 如何使用一个,基于某一分割算法提取点云中的一个子集。 代码解析 #include <iostream>#include <pcl/ModelCoefficients.h>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <pcl/sample_con
PCL滤波介绍(2)
(1)使用statisticalOutlierRemoval滤波器移除离群点 使用统计分析技术,从一个点云数据中集中移除测量噪声点(也就是离群点)比如:激光扫描通常会产生密度不均匀的点云数据集,另外测量中的误差也会产生稀疏的离群点,使效果不好,估计局部点云特征(例如采样点处法向量或曲率变化率)的运算复杂,这会导致错误的数值,反过来就会导致点云配准等后期的处理失败。 解决办法:每个点的邻

PCL滤波介绍(1)
在获取点云数据时 ,由于设备精度,操作者经验环境因素带来的影响,以及电磁波的衍射特性,被测物体表面性质变化和数据拼接配准操作过程的影响,点云数据中讲不可避免的出现一些噪声。在点云处理流程中滤波处理作为预处理的第一步,对后续的影响比较大,只有在滤波预处理中将噪声点 ,离群点,孔洞,数据压缩等按照后续处理定制,才能够更好的进行配准,特征提取,曲面重建,可视化等后续应用处理,PCL中点云滤波模块提供了很


kd-tree理论以及在PCL 中的代码的实现
(小技巧记录:博客园编辑的网页界面变小了使用Ctrl ++来变大网页字体) 通过雷达,激光扫描,立体摄像机等三维测量设备获取的点云数据,具有数据量大,分布不均匀等特点,作为三维领域中一个重要的数据来源,点云主要是表征目标表面的海量点的集合,并不具备传统网格数据的几何拓扑信息,所以点云数据处理中最为核心的问题就是建立离散点间的拓扑关系,实现基于邻域关系的快速查找。 k-d树 (k-dime
PCL中可用的PointT类型
PCL中可用的PointT类型: PointXYZ——成员变量:float x,y,z; PointXYZ是使用最常见的一个点数据类型,因为他之包含三维XYZ坐标信息,这三个浮点数附加一个浮点数来满足存储对齐,可以通过points[i].data[0]或points[i].x访问点X的坐标值 union{float data[4];struct{float x;f

点云python-pcl
PCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。如果说OpenCV是2D信息获取与处理的


PCL-基于超体聚类的LCCP点云分割
目录 一、LCCP方法二、代码实现三、实验结果四、总结五、相关链接 一、LCCP方法 LCCP指的是Local Convexity-Constrained Patch,即局部凸约束补丁的意思。LCCP方法的基本思想是在图像中找到局部区域内的凸结构,并将这些结构用于分割图像或提取特征。这种方法可以帮助识别图像中的凸物体,并对它们进行分割。LCCP方法通常结合了空间和法线信息,以提高
【C++PCL】点云处理稳健姿态估计配准
作者:迅卓科技 简介:本人从事过多项点云项目,并且负责的项目均已得到好评! 公众号:迅卓科技,一个可以让您可以学习点云的好地方 重点:每个模块都有参数如何调试的讲解,即调试某个参数对结果的影响是什么,大家有问题可以评论哈,如果文章有错误的地方,欢迎来指出错误的地方。 目录 1.原理介绍 2.代码效果 3.源码展示 4.
【C++PCL】点云处理Kd-tree原理
作者:迅卓科技 简介:本人从事过多项点云项目,并且负责的项目均已得到好评! 公众号:迅卓科技,一个可以让您可以学习点云的好地方 重点:每个模块都有参数如何调试的讲解,即调试某个参数对结果的影响是什么,大家有问题可以评论哈,如果文章有错误的地方,欢迎来指出错误的地方。 目录 1.原理介绍 1.原理介绍 kd-tree是散乱点云的一种储存结构,它是一种
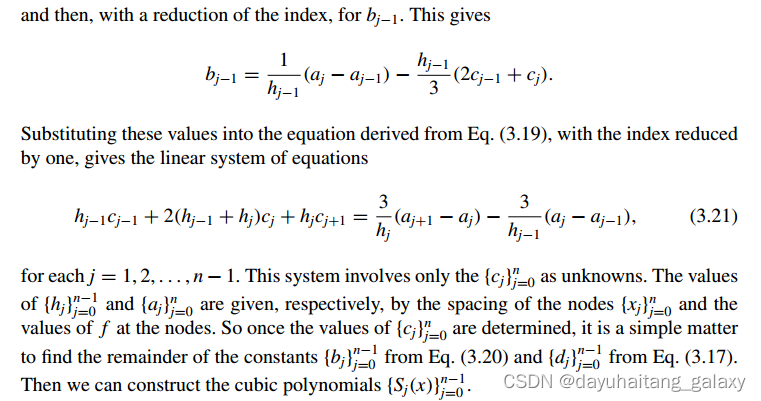
PCL 三次样条插值(二维点)
一、简介 在插值计算中,最简单的分段多项式近似应该是分段线性插值,它由连接一组数据点组成,仅仅只需要将这些点一一用直线进行顺序相连即可。不过线性函数插值的缺点也很明显,就是在两个子区间变化的比较突兀,也就是没有可微性(不够光滑)。因此我们需要更为符合物理情况的一种曲线,一般来讲,三次多项式包含四个常数,它可以确保插值函数不仅在区间上连续可微,而且具有连续的二阶导数,这样就可以达到我们想要节点处