livox专题

livox雷达斜装修改
fast_lio中的mid360.yaml中的外参 extrinsic_est_en: false # true: enable the online estimation of IMU-LiDAR extrinsicextrinsic_T: [ -0.011, -0.02329, 0.04412 ]extrinsic_R: [ 1, 0, 0,

r3live 使用前提 雷达-相机外参标定 livox_camera_lidar_calibration
标定的是相机到雷达的,R3live下面配置的雷达到相机的,所以要把得到外参旋转矩阵求逆,再填入,平移矩阵则取负 港科大livox_camera_calib虽然操作方便,但是使用mid360雷达会有视角问题(投影三维点到相机),尝试了很多场景,标定效果都不理想(推荐场景是楼梯间),看来港大的更适合avia之类窄角度的雷达。livox_camera_lidar_calibration标定效果还不错,但
LIVOX HAP激光雷达使用方法
一、Livox HAP介绍 Livox HAP 由 Livox 团队耗时两年精心打造,是 Livox 首款面向智能辅助驾驶市场研发的车规级激光雷达。HAP 于 2021 年在全新自建的车规级智能制造中心进行批量生产,可满足 74 项严苛的车规可靠性要求。HAP 已成功为小鹏汽车、一汽解放等商乘用车项目批量供货。 小鹏 D55 所搭载的
激光雷达标定入门(10)ROS驱动固态激光雷达(Livox Horizon)
Livox Horizon 资料 据Livox官网介绍,Horizon的探测距离为260米,水平视场角(HFOV)81.7°,可以覆盖10米内的4条车道,搭载5个Horizon的自动驾驶系统可以实现360°的全区域探测,而该套装成本仅为64线机械激光雷达的5%。 1 上位机确认IP 一定要确定IP段,因为有人改了IP段,导致一开始折腾了很久 下载Livox VIewer,官网:http

livox avia平台搭建
硬件平台搭建 硬件平台的搭建除了livox雷达外还需要以下物料 焊接12V稳压模块接口 livox雷达需要12V的稳定电压供电,因此需要在电池与雷达之间加入8-35V转12V的稳压模块 组装 将各组建组装起来即可。 220V交流电供电 电池供电
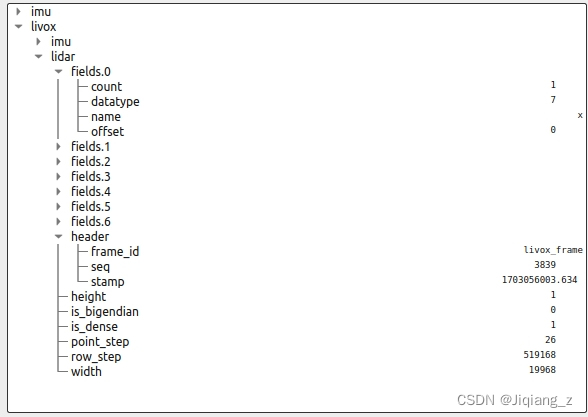
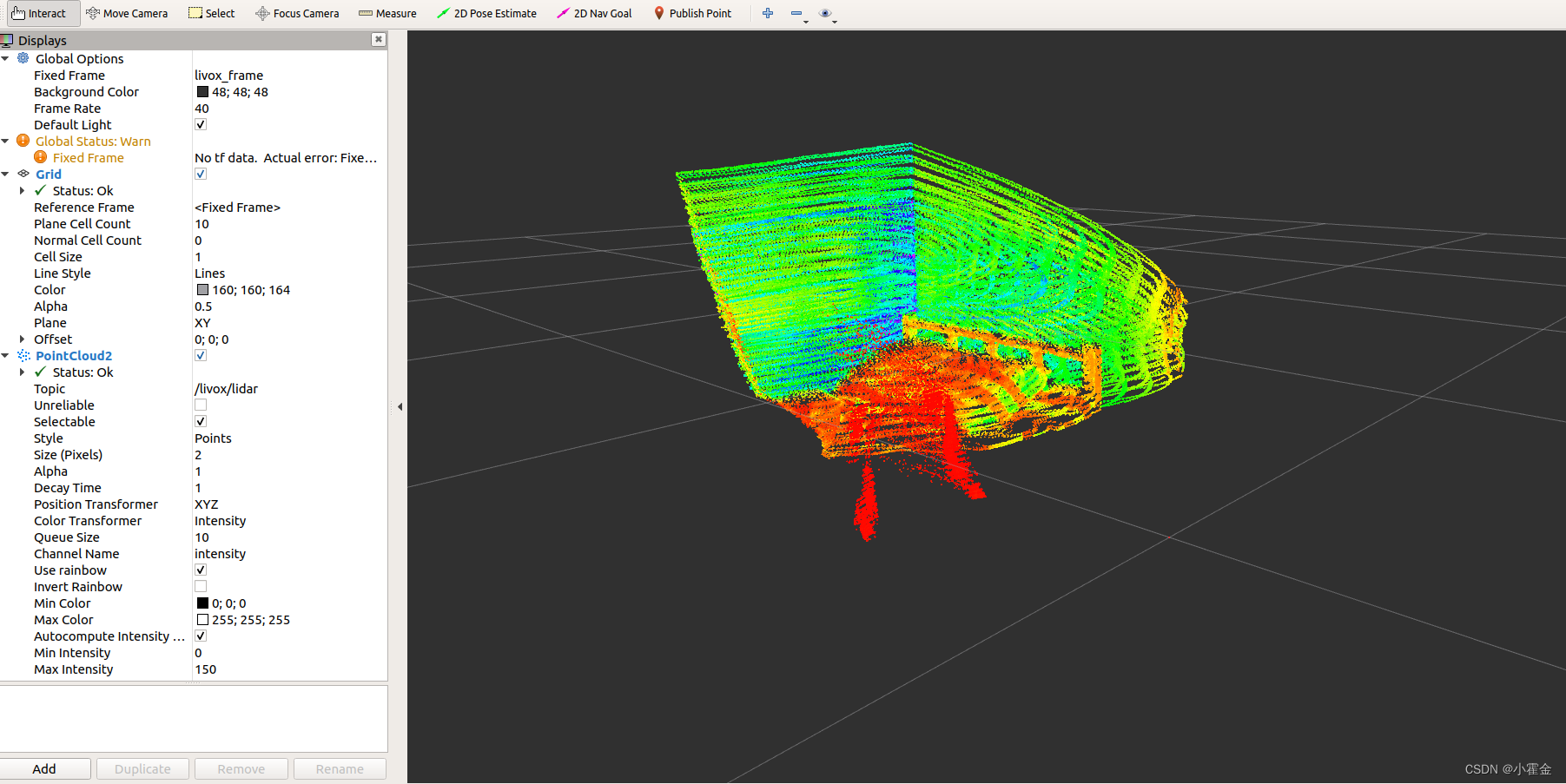
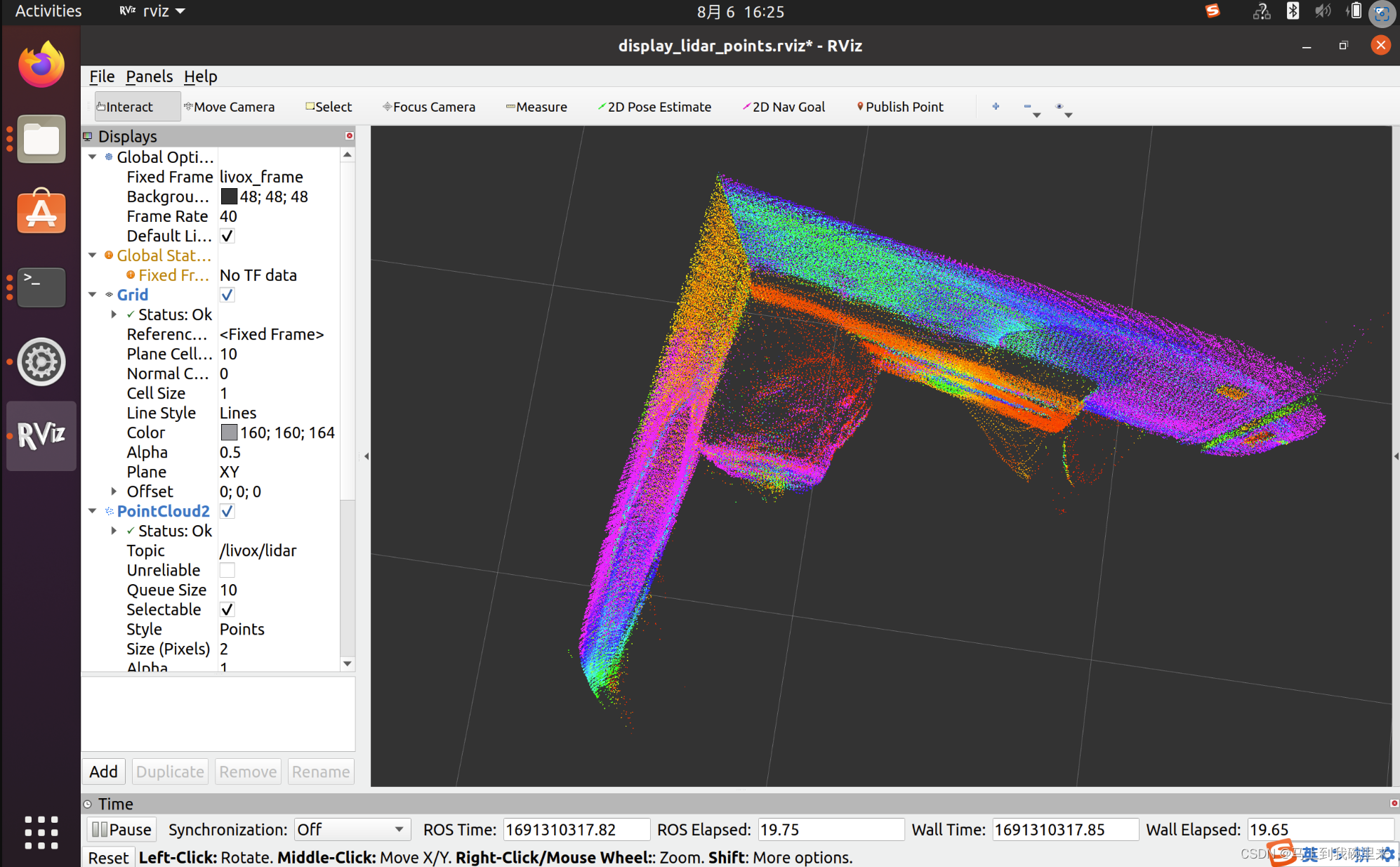
Livox-Mid-360 固态激光雷达ROS格式数据分析
前言: Livox-Mid-360 官方采用livox_ros_driver2ROS功能包发布ROS格式的数据,livox_ros_driver2可以把Livox原始雷达数据转化成ROS格式并以话题的形式发布出去。 下面列举一些雷达的基本概念: 点云帧:雷达驱动每次向外发送的一组雷达数据集合称为一帧雷达数据。如果帧率是10HZ,那么每帧点云数据是100ms内雷达扫描的点云集合。每发布一次to
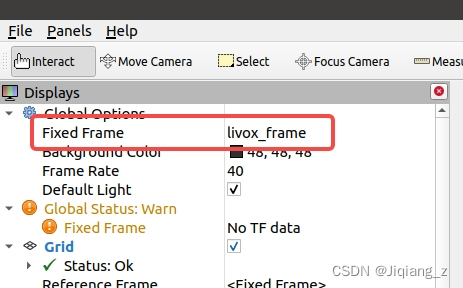
Ubuntu 20.04使用Livox Mid-360
参考文章: Ubuntu 20.04使用Livox mid 360 测试 FAST_LIO-CSDN博客 一:Livox mid 360驱动安装与测试 前言: Livox mid360需要使用Livox-SDK2,而非Livox-SDK,以及对应的livox_ros_driver2 。并需要修改FAST_LIO中部分代码。 1. 安装Livox-SDK2 参照官方教程:GitHub -
Ubuntu环境下使用Livox mid 360
参考文章: Ubuntu 20.04使用Livox mid 360 测试 FAST_LIO-CSDN博客 一:Livox mid 360驱动安装与测试 前言: Livox mid360需要使用Livox-SDK2,而非Livox-SDK,以及对应的livox_ros_driver2 。并需要修改FAST_LIO中部分代码。 1. 安装Livox-SDK2 参照官方教程:GitHub -
点云格式转换:将 ros PointCloud2格式数据转为livox CustomMsg格式
将 ros PointCloud2格式数据转为livox CustomMsg格式 前言点云格式PointCloud2 点云格式livox CustomMsg 点云格式 将 ros PointCloud2格式数据转为livox CustomMsg格式测试 前言 览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业,Livox致力于提供高性能、低成本的激光雷达传感器。
点云 ros PointCloud2格式与livox CustomMsg格式介绍
点云 ros PointCloud2格式与livox CustomMsg格式介绍 PointCloud2 点云格式livox CustomMsg 点云格式 PointCloud2 点云格式 PointCloud2 是ros的一种点云格式 具体官方数据 http://docs.ros.org/en/jade/api/sensor_msgs/html/msg/PointClou

Livox_ros_driver2 消息 (msg) 类型对 SLAM 应用程序的适配
Title: Livox_ros_driver2 消息 (msg) 类型对 SLAM 应用程序的适配 文章目录 I 前言II. 查看 ROS 消息III. Livox ROS 驱动的消息类型IV. 适配修改应用程序V. 总结 I 前言 有时候, 拿到最新的 Livox 激光传感器, 比如 HAP, 原厂也提供了 ROS 驱动支持 livox_ros_drivers2 (ht
livox mid360 + fast-livo
安装Livox-SDK2 git clone https://github.com/Livox-SDK/Livox-SDK2.gitcd ./Livox-SDK2/mkdir buildcd buildcmake .. && make -jsudo make install 安装livox_ros_driver2 git clone https://github.com/Livo
4.livox hap(大疆激光雷达)环境搭建
本文是在rk3588设备的ubuntu20.04的系统环境下搭建livox hap的。大概的步骤分为: 一、gcc、g++、cmake 的安装 二、ros安装(上一章已介绍) 三、Livox SDK2的编译 四、livox_ros_driver2的编译 五、hap的点云视频录制、点播点云视频bag、bag格式转为pcd格式、pcd文件的查看 一些内容看了两个
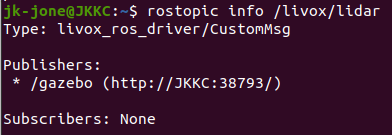
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2
在gazebo里搭建一个livox mid360 + 惯导仿真平台测试 FAST-LIO2 前言立方体平台加入 livox mid360 激光雷达加入IMU模块调整底盘大小 并设计调用接口测试 Fast-Lio2 前言 livox mid360 在官网一直没有货,在gazebo里可以仿真该雷达形式的点云。 但是其只发布雷达的数据,没有imu数据,实际的雷达是可以发布既有雷达也有
livox 半固体激光雷达 gazebo 仿真 | 安装与验证
livox 半固体激光雷达 gazebo 仿真 | 安装与验证 livox 半固体激光雷达 gazebo 仿真 | 安装与验证livox 介绍安装验证 livox 半固体激光雷达 gazebo 仿真 | 安装与验证 livox 介绍 览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业,Livox致力于提供高性能、低成本的激光雷达传感器。通过降低使用门槛和生产

大疆Livox MID-360安装ROS1/2驱动 Ubuntu20.04
文章目录 一、接线连接二、安装上位机可视化工具三、安装ROS驱动3.1 配置静态IP3.2 安装Livox SDK23.3 安装ROS驱动3.4 驱动 本文介绍如何在Ubuntu20.04中安装大疆Livox MID-360的ROS1/2驱动 一、接线连接 livox航插一分三线,其中航空母头连接激光雷达,网线连接PC,电源需要DC 9~27 V,推荐使用 12 V,注意

大疆Livox Mid360 使用指南
作者: Herman Ye @Galbot @Auromix 版本: V1.0 测试环境: Ubuntu20.04 更新日期: 2023/08/18 注1: 本文内容中的硬件由 @Galbot 提供支持。 注2: @Auromix 是一个机器人爱好者开源组织。 注3: 本文在更新日期经过测试,确认有效。 注4: 本文中直接引用Livox官方文档的部分内容,版权为Livox所有。 简易使用指南
【Ubuntu18.04】激光雷达与相机联合标定(Livox+HIKROBOT)(一)相机内参标定
Livox+HIKROBOT联合标定——相机内参标定 引言1 海康机器人HIKROBOT SDK二次开发并封装ROS1.1 介绍1.2 安装MVS SDK1.3 封装ROS packge 2 览沃Livox SDK二次开发并封装ROS3 相机雷达联合标定——相机内参标定3.1 环境配置3.1.1 安装依赖——PCL 安装3.1.2 安装依赖——Eigen 安装3.1.3 安装依赖——Cere
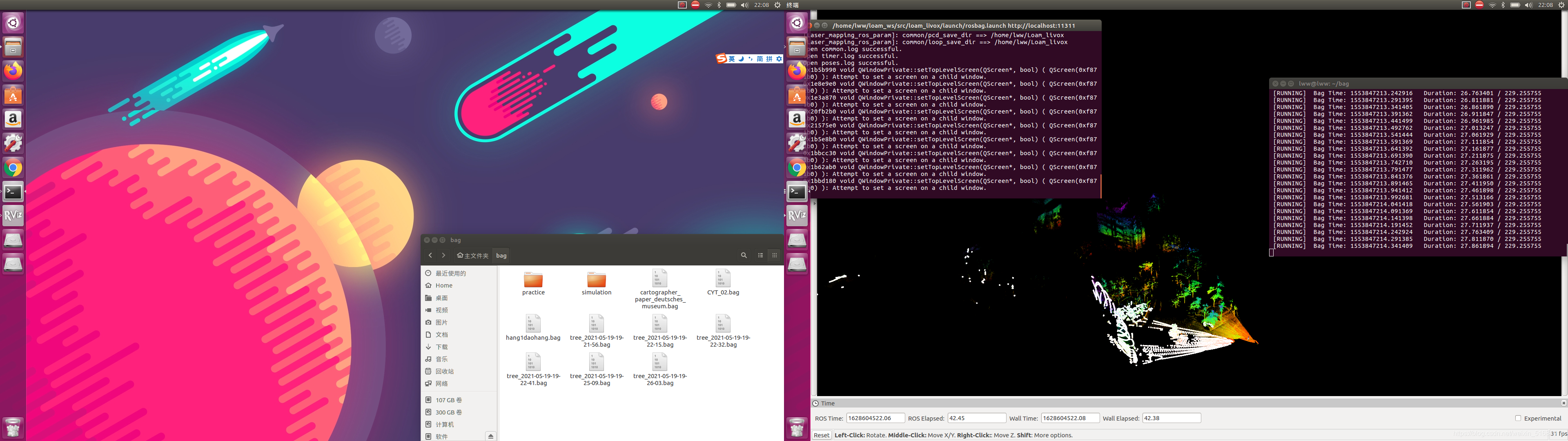
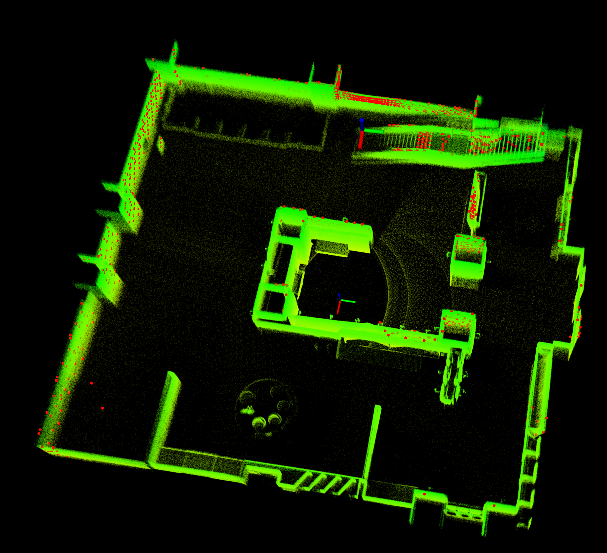
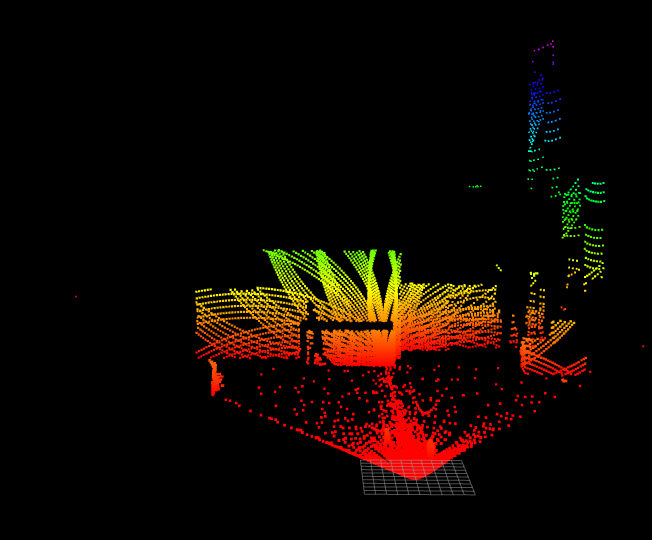
ubuntu16下利用loam_livox建图
0 引言 最近在学习slam建图,想尝试使用大疆mid40利用loam_livox来进行建图,整个过程中遇到了特别多的坑,重装了五六次系统,所幸尝试之前将系统镜像了。 这个算法不需要里程计,利用激光雷达发布的实时点云信息或者录制的bag包均可实时建图。 loam_livox建图需要安装ceres_solver、eigen3、pcl1.9。个人感觉最