本文主要是介绍livox 半固体激光雷达 gazebo 仿真 | 安装与验证,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
livox 半固体激光雷达 gazebo 仿真 | 安装与验证
- livox 半固体激光雷达 gazebo 仿真 | 安装与验证
- livox 介绍
- 安装
- 验证
livox 半固体激光雷达 gazebo 仿真 | 安装与验证
livox 介绍
览沃科技有限公司(Livox)成立于2016年。为了革新激光雷达行业,Livox致力于提供高性能、低成本的激光雷达传感器。通过降低使用门槛和生产成本,Livox将激光雷达技术集成到更多产品和应用之中,从而为自动驾驶、智慧城市、测绘、移动机器人等行业带来创新性改变。Livox产品已销往包括美国、加拿大、中国、日本和欧盟在内的 26 个国家和地区。
面向智能移动机器人市场,Livox 推出最新一代 3D 激光雷达 Mid-360,开启混合固态激光雷达 360° 立体感知新篇章。凭借小巧体积,Mid-360 的安装布置更加灵活。同时,Mid-360 充分考虑了移动机器人对导航、避障等升维感知的需求,兼容室内外场景,赋能移动机器人进入空间智能感知新时代。 但是这款产品官网一直购买不到, 本篇博客 在 gazebo 中 可实现对该激光雷达的仿真 。
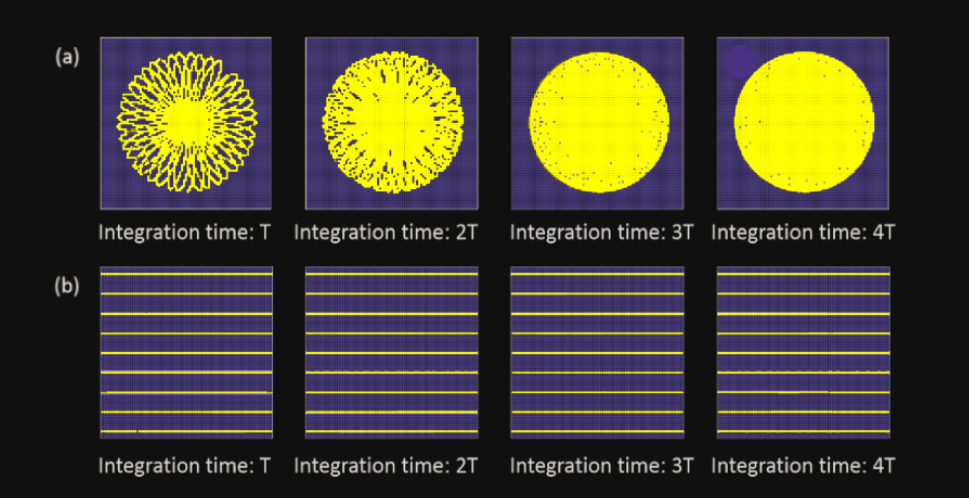
传统激光雷达普遍采用机械扫描方式,扫描路径随时间重复。而Livox 激光雷达采用了独特的扫描⽅式,扫描路径不会重复。在非重复扫描方式中,视场中被激光照射到的区域面积会随时间增大,这意味着视场覆盖率随时间推移而显著提高,可减小视场内物体被漏检的概率,有助于探测视场中的更多细节。
下图中给出了一个直观的例子。(a)图由于采用了非重复扫描方式,随着时间的积累,视场覆盖率逐渐升高。而(b)图,由于扫描每次都是重复的,视场覆盖率几乎没有提升。
在gazebo的默认的lidar插件,属于传统激光雷达机械扫描方式,如法实现livox的非重复式扫描。 本篇博客在gazebo 中,对livox的几款雷达进行了仿真测试。
安装
github地址:https://github.com/Livox-SDK/livox_laser_simulation
下载代码
git clone https://github.com/Livox-SDK/livox_laser_simulation
正克隆到 ‘livox_laser_simulation’…
remote: Enumerating objects: 74, done.
remote: Counting objects: 100% (37/37), done.
remote: Compressing objects: 100% (23/23), done.
remote: Total 74 (delta 21), reused 14 (delta 14), pack-reused 37
展开对象中: 100% (74/74), 69.90 MiB | 1.14 MiB/s, 完成.

下载完毕后,拷入ros的工作空间
在ubutun20.04 的系统下gazebo是11版本,github上的是针对ubuntu18.04 gazebo9的,需要将CMakeLists.txt文件中的
第5行
add_compile_options(-std=c++11)
改为
add_compile_options(-std=c++17)
进行编译
出现报错
In file included from /home/jk-jone/jone_ws/src/livox_laser_simulation/src/livox_ode_multiray_shape.cpp:14:
/home/jk-jone/jone_ws/src/livox_laser_simulation/include/livox_laser_simulation/livox_ode_multiray_shape.h:10:10: fatal error: ignition/math4/ignition/math.hh: 没有那个文件或目录
10 | #include <ignition/math4/ignition/math.hh>
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
compilation terminated.

报错的原因是 找不到 ignition/math4/ignition 路径下的 math.hh文件
这个要看是没装 ignition这个库 还是版本不对的原因
在计算机中搜索 ignition

搜到该文件夹说明是有装的,那可能版本不对,进入该文件夹

这里有的math6 而不是代码中的 math4 ,所以找不对,再进入math6文件夹下,看ignition文件夹下是否有math.hh文件是否有,一般都是有的

那解决那个问题,只需要把代码中的路径改对就行
到报错的代码文件 include/livox_laser_simulation/livox_ode_multiray_shape.h
第10行
#include <ignition/math4/ignition/math.hh>
改为:
#include <ignition/math6/ignition/math.hh>
到报错的代码文件 src/livox_ode_multiray_shape.cpp
第15行
#include <ignition/math4/ignition/math.hh>
改为:
#include <ignition/math6/ignition/math.hh>
再次编译
则正常完成

验证
该功能包默认有一个启动文件 launch/livox_simulation.launch
直接启动即可
roslaunch livox_laser_simulation livox_simulation.launch
gazebo中加载了一个工厂的环境

地上有个小的机器人,上面有个livox mid40的模型

rivz中有livox的点云
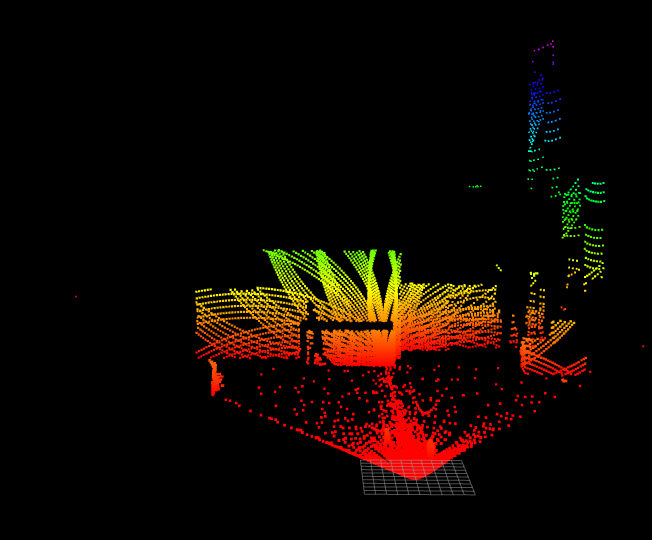
rostopic 中有个 scan的话题,就是点云的话题名称
这篇关于livox 半固体激光雷达 gazebo 仿真 | 安装与验证的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









