本文主要是介绍LIVOX HAP激光雷达使用方法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、Livox HAP介绍
Livox HAP 由 Livox 团队耗时两年精心打造,是 Livox 首款面向智能辅助驾驶市场研发的车规级激光雷达。HAP 于 2021 年在全新自建的车规级智能制造中心进行批量生产,可满足 74 项严苛的车规可靠性要求。HAP 已成功为小鹏汽车、一汽解放等商乘用车项目批量供货。
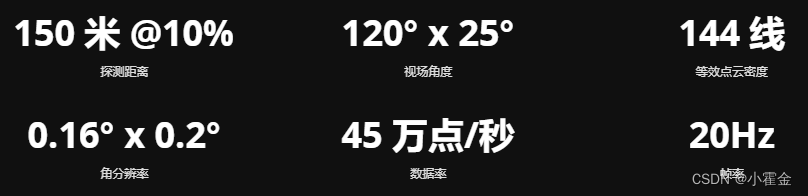
小鹏 D55 所搭载的车载量产版性能参数相比 HAP 将进一步优化,得益于三棱镜的加成,HAP 探测距提升至 150 米(针对 10% 反射率目标物),横向 120° FOV,前侧向双台布置使得视野提升到 150°,实现 144 线的点云密度,角度分辨率高达 0.16°,中心区域刷新率 20Hz,可实现高速公路、城区道路等场景下远处障碍物的检测,提升辅助驾驶行车安全;与蔚来 ET7 及 R 汽车 ES33 不同,小鹏 D55 的激光雷达布局将位于前保险杠两侧。
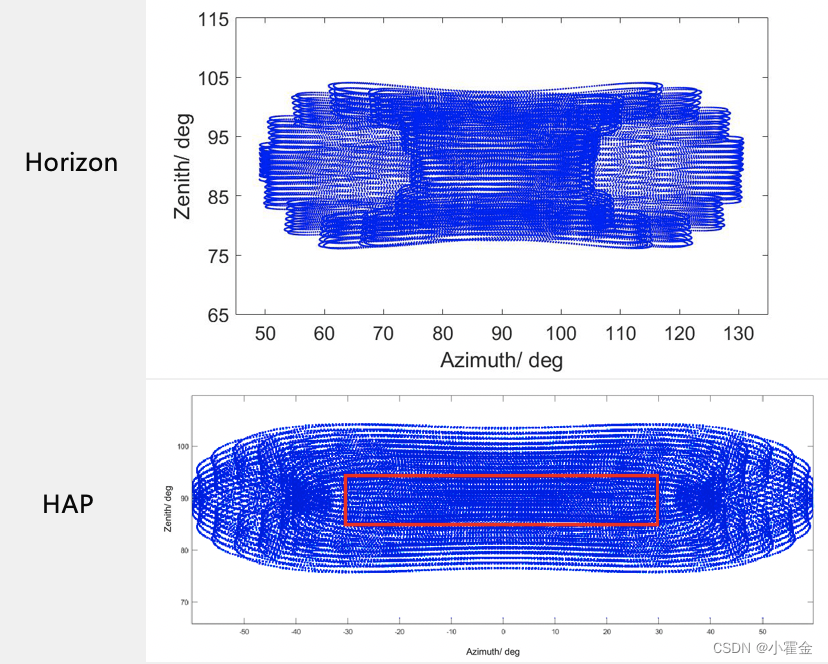
同时,三棱镜可以实现同轴独立旋转,光束可实现大角度偏转,并且可以通过棱镜的角度差来实现不同的扫描效果并且棱镜有一个转动较慢、另外两个则转动较快,可实现联动运行。
而在棱镜的可靠性上,不同于工规版的 Horizon ,车规版的 HAP 采用了只有在 Livox Tele-15 产品上使用过的小轴承工艺来进行棱镜电机驱动。HAP 采用了比 Tele-15 更小的 6mm 直径的小轴承,相比比 Tele-15 的转子线速度进一步下降了 33% 。 HAP 还得到了线速度、转速等方面的优化,同时 HAP 轴承的油脂含量只有 Tele-15 的 1/2 ,只有 Horizon 的1/25。
二、Livox Hap的使用
环境:作者使用的是Ubuntu 18.04 ROS melodic
-
x86
- Ubuntu 20.04 / Ubuntu 18.04 / Ubuntu 16.04
-
ARM (Nvidia TX2)
- Ubuntu 18.04
-
Windows 10 + Visual Studio 2019
-
Compiler supporting C++11
下载:Livox SDK 2和livox_ros_driver2
2.1 配置和编译Livox SDK2
依赖:
- CMake 3.0.0+
- gcc 4.8.1+
CMake安装
$ sudo apt install cmake下载和编译
$ git clone https://github.com/Livox-SDK/Livox-SDK2.git
$ cd ./Livox-SDK2/
$ mkdir build
$ cd build
$ cmake .. && make -j
$ sudo make install2.2配置和编译 livox_ros_driver2
官方要求是noetic,其实melodic也能够完成
下载代码
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2如果没有下载SDK2的话,需要编译SDK2
cd ws_livox/src/livox_ros_driver2
sudo ./dedicated_sdk/build.sh ROS1编译 livox_ros_driver2
source /opt/ros/melodic/setup.sh
./build.sh ROS12.3运行和配置网络
设置静态网络,根据官网配置ip为192.168.1.50,网关为255.255.255.0;

运行代码
source ../../devel/setup.sh
roslaunch livox_ros_driver2 livox_lidar_rviz_HAP.launch发现错误
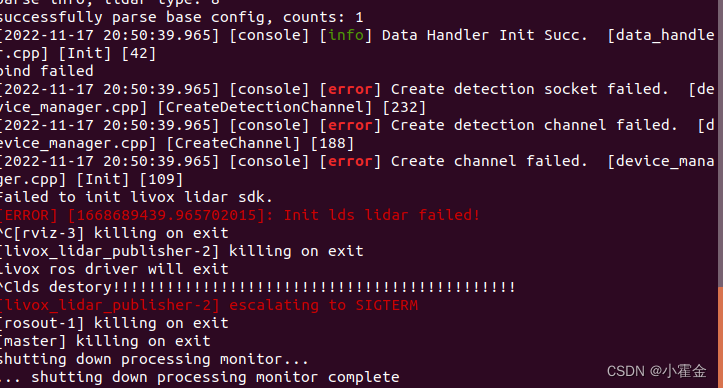
解决办法
改正config_ROS1/HAP_config.json文件中的所有的192.168.1.5为192.168.1.50
{"lidar_summary_info" : {"lidar_type": 8 # protocol type index, please don't revise this value},"HAP": {"device_type" : "HAP","lidar_ipaddr": "","lidar_net_info" : {"cmd_data_port": 56000, # command port"push_msg_port": 0,"point_data_port": 57000,"imu_data_port": 58000,"log_data_port": 59000},"host_net_info" : {"cmd_data_ip" : "192.168.1.50", # host ip"cmd_data_port": 56000,"push_msg_ip": "","push_msg_port": 0,"point_data_ip": "192.168.1.50", # host ip"point_data_port": 57000,"imu_data_ip" : "192.168.1.50", # host ip"imu_data_port": 58000,"log_data_ip" : "","log_data_port": 59000}},"lidar_configs" : [{"ip" : "192.168.1.100", # ip of the LiDAR you want to config"pcl_data_type" : 1,"pattern_mode" : 0,"blind_spot_set" : 50,"extrinsic_parameter" : {"roll": 0.0,"pitch": 0.0,"yaw": 0.0,"x": 0,"y": 0,"z": 0}}]
}
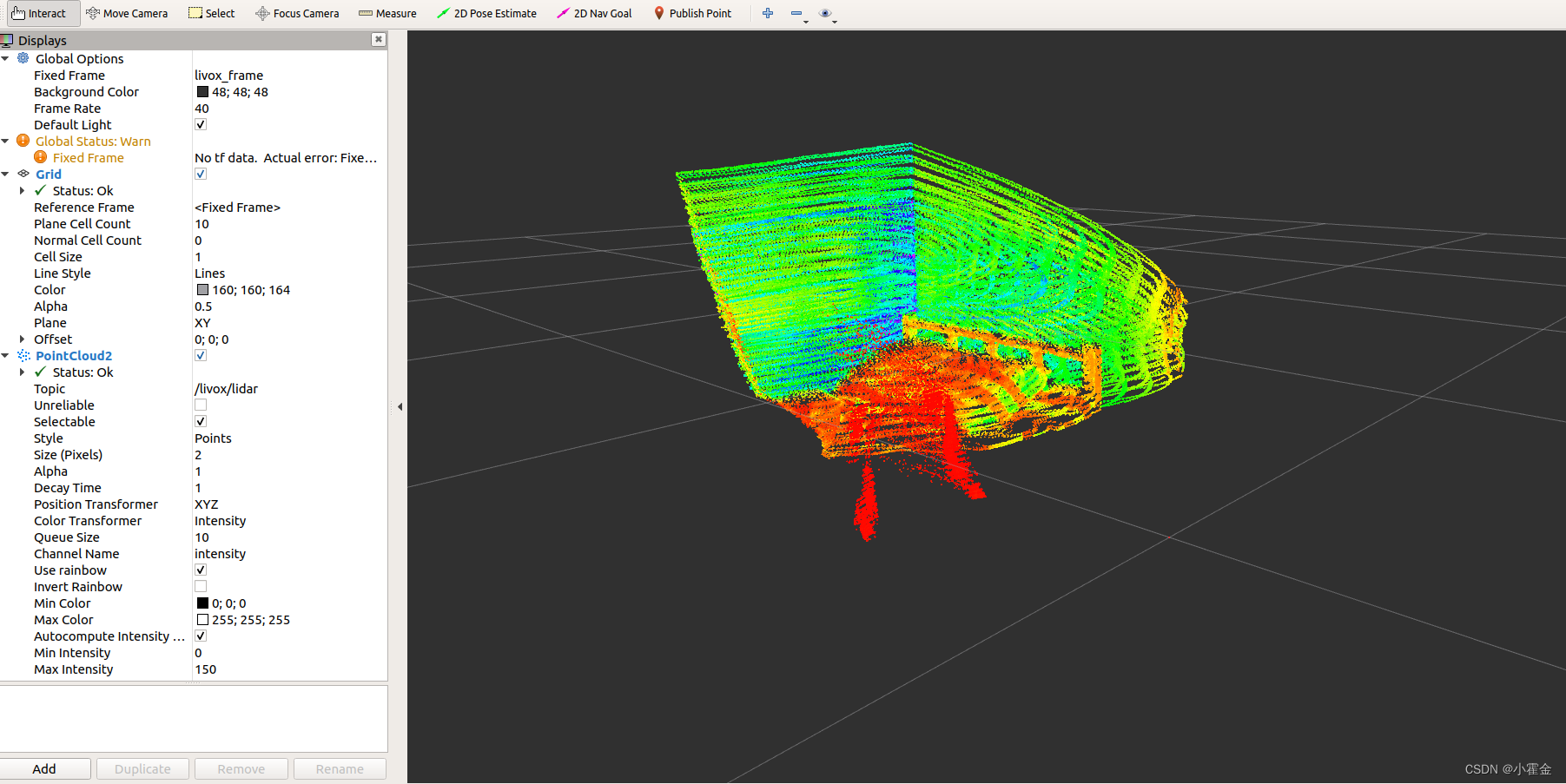
再次运行,可以看到以下画面
参考
览沃浩界 HAP 激光雷达
独家|小鹏车载Livox 激光雷达正式命名为HAP 官图首次曝光_新闻_新出行
深度解读Livox车规产品之HAP(一)棱镜式扫描方案 - 知乎
GitHub - Livox-SDK/Livox-SDK2: Drivers for receiving LiDAR data and more, support Lidar HAP.GitHub - Livox-SDK/livox_ros_driver2: Livox device driver under Ros, support Lidar HAP.
这篇关于LIVOX HAP激光雷达使用方法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





