本文主要是介绍4.livox hap(大疆激光雷达)环境搭建,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文是在rk3588设备的ubuntu20.04的系统环境下搭建livox hap的。大概的步骤分为:
一、gcc、g++、cmake 的安装
二、ros安装(上一章已介绍)
三、Livox SDK2的编译
四、livox_ros_driver2的编译
五、hap的点云视频录制、点播点云视频bag、bag格式转为pcd格式、pcd文件的查看
一些内容看了两个博主的步骤,分别是
Livox HAP 一文搞定HAP激光雷达的连接和使用(详细版)_livox激光雷达-CSDN博客
LIVOX HAP激光雷达使用方法_livox 浩界 hap_半熟芝士味的博客-CSDN博客
点云数据按照特定时间的抓取在下一章写(python文件),下面具体介绍:
一、gcc、g++、cmake 的安装
1.gcc、g++的安装
查看gcc是否存在
gcc -v查看g++是否存在
g++ -v安装gcc、g++,终端分别运行下面两行代码
sudo apt-get update
sudo apt-get install build-essential注意:如果以上代码安装报错,则用aptitude安装。分别运行以下代码
#1.安装aptitude
sudo apt install aptitude#2.安装build-essential
sudo aptitude install build-essential中途遇到[Y/n/q/?]时,输入Y后再enter键即可。
2.cmake 的安装
sudo apt install cmake二、ros安装(上一章已介绍)
可以看3.ubuntu20.04环境的ros搭建-CSDN博客
三、Livox SDK2的编译
下载和编译Livox-SDK2
$ git clone https://github.com/Livox-SDK/Livox-SDK2.git
$ cd ./Livox-SDK2/
$ mkdir build
$ cd build
$ cmake ..
$ make -j
$ sudo make install注意:在make -j可能会报错,处理错误的方法看【问题解决】C++: fatal error: Killed signal terminated program cc1plus_tiffiny10的博客-CSDN博客 具体方法如下:
# 创建分区路径
sudo mkdir -p /var/cache/swap/
# 设置分区的大小
# bs=64M是块大小,count=64是块数量,所以swap空间大小是bs*count=4096MB=4GB
sudo dd if=/dev/zero of=/var/cache/swap/swap0 bs=64M count=64
# 设置该目录权限
sudo chmod 0600 /var/cache/swap/swap0
# 创建SWAP文件
sudo mkswap /var/cache/swap/swap0
# 激活SWAP文件
sudo swapon /var/cache/swap/swap0
# 查看SWAP信息是否正确
sudo swapon -s
然后再次运行
make -j四、livox_ros_driver2的编译
这里我装的是ROS1,所以下面直接按照ROS1按照了。
1.下载livox_ros_driver2。注意,下载在文件夹src/下:
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver22.编译 livox_ros_driver2。注意,在文件夹src/livox_ros_driver2/下编译:
source /opt/ros/melodic/setup.sh
./build.sh ROS13.网络配置。
设置静态网络,根据官网将服务器或者rk3588设备配置ip为192.168.1.50,网关为255.255.255.0,如下图:

修改路径/src/livox_ros_driver2/config/下的文件HAP_config.json,上面我们将IP修改为了192.168.1.50,那么打开该文件,将该文件的3个IP都修改为192.168.1.50,如下:
{"lidar_summary_info" : {"lidar_type": 8},"HAP": {"lidar_net_info" : {"cmd_data_port": 56000,"push_msg_port": 0,"point_data_port": 57000,"imu_data_port": 58000,"log_data_port": 59000},"host_net_info" : {"cmd_data_ip" : "192.168.1.50","cmd_data_port": 56000,"push_msg_ip": "","push_msg_port": 0,"point_data_ip": "192.168.1.50","point_data_port": 57000,"imu_data_ip" : "192.168.1.50","imu_data_port": 58000,"log_data_ip" : "","log_data_port": 59000}},"lidar_configs" : [{"ip" : "192.168.1.116","pcl_data_type" : 1,"pattern_mode" : 0,"extrinsic_parameter" : {"roll": 0.0,"pitch": 0.0,"yaw": 0.0,"x": 0,"y": 0,"z": 0}}]
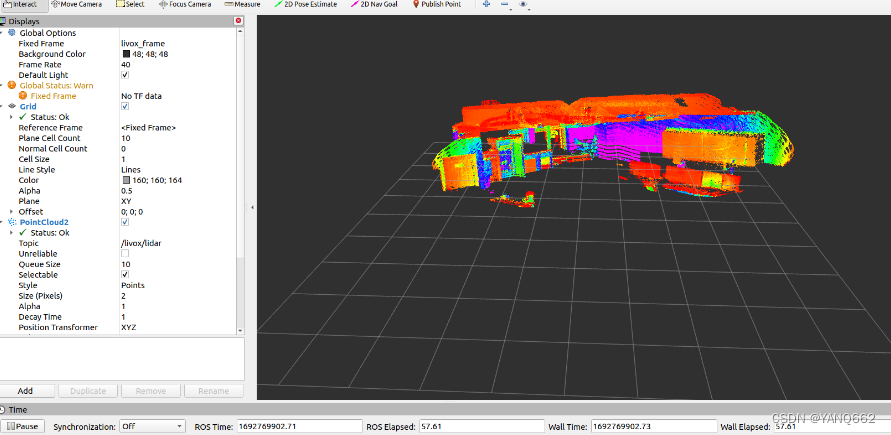
}4.连接Livox HAP。在文件夹/src/livox_ros_driver2/下运行:
source ../../devel/setup.sh
roslaunch livox_ros_driver2 rviz_HAP.launch运行成功后得到界面如下:
五、hap的点云视频录制、点播点云视频bag、bag格式转为pcd格式、pcd文件的查看(用的上面 微博的内容)
1.录制点云视频bag
先根据四连接Livox HAP,建立一个要保存bag的新的文件夹,如建立/src/saves/,在该文件夹下运行:
rosbag record -a2.播放点云视频bag
打开终端,输入
roscore再新打开一个终端,输入下列代码代开rviz:
rosrun rviz rviz设置rviz,在左边选项卡的左下角选add选项,添加PointCloud2。
并将其下的topic改为/livox/lidar
接着打开新终端,输入:
rosbag play xxx.bag此时文件就可以在rviz中播放了。
3.bag格式转换为pcd格式
首先需要知道自己的bag格式的topics信息,打开bag文件所在路径的终端,输入下面的命令:
rosbag info *.bag找到topics那一行,将后面的内容复制
rosrun pcl_ros bag_to_pcd 1.bag /livox/lidar pcd1.bag为bag文件名称;/livox/lidar为刚刚获取的topics位置;pcd为生成的pcd保存路径。
4.查看pcd文件
利用pcd_viewer查看pcd文件,输入下面命令
pcl_viewer xxx.pcd以上的环境搭建和使用就讲完了,其实就是查了很多资料再总结在了一起,希望大家少走弯路。下一章介绍怎样用python代码根据特定的时间自动保存bag文件及自动将bag文件转换为pcd文件。
这篇关于4.livox hap(大疆激光雷达)环境搭建的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






