本文主要是介绍livox mid360 + fast-livo,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
安装Livox-SDK2
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
安装livox_ros_driver2
git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2
cd ws_livox/src/livox_ros_driver2
./build.sh ROS1
source ../../devel/setup.bash
roslaunch livox_ros_driver2 rviz_MID360.launch
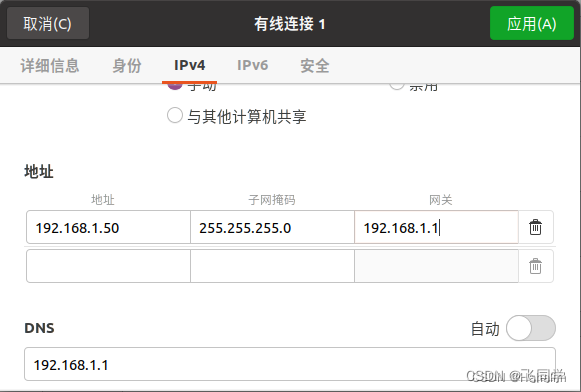
设置静态ip
首先在Ubuntu20.04下将本机以太网IP地址置于和雷达IP同一局域网下
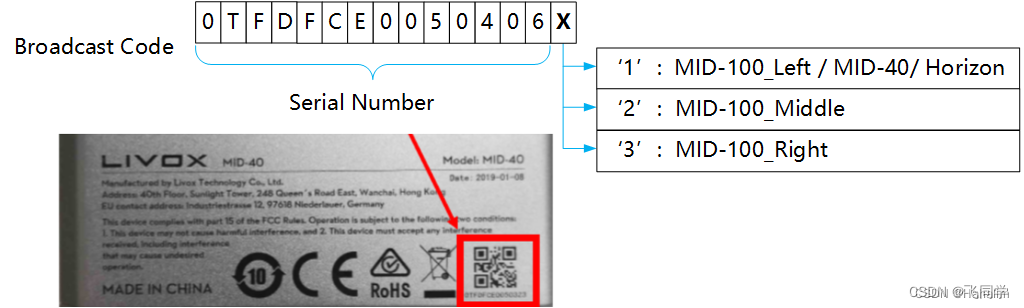
记住雷达的广播码
雷达的广播码在雷达后面,可以在雷达机身的QR 码下面查看,共15位数
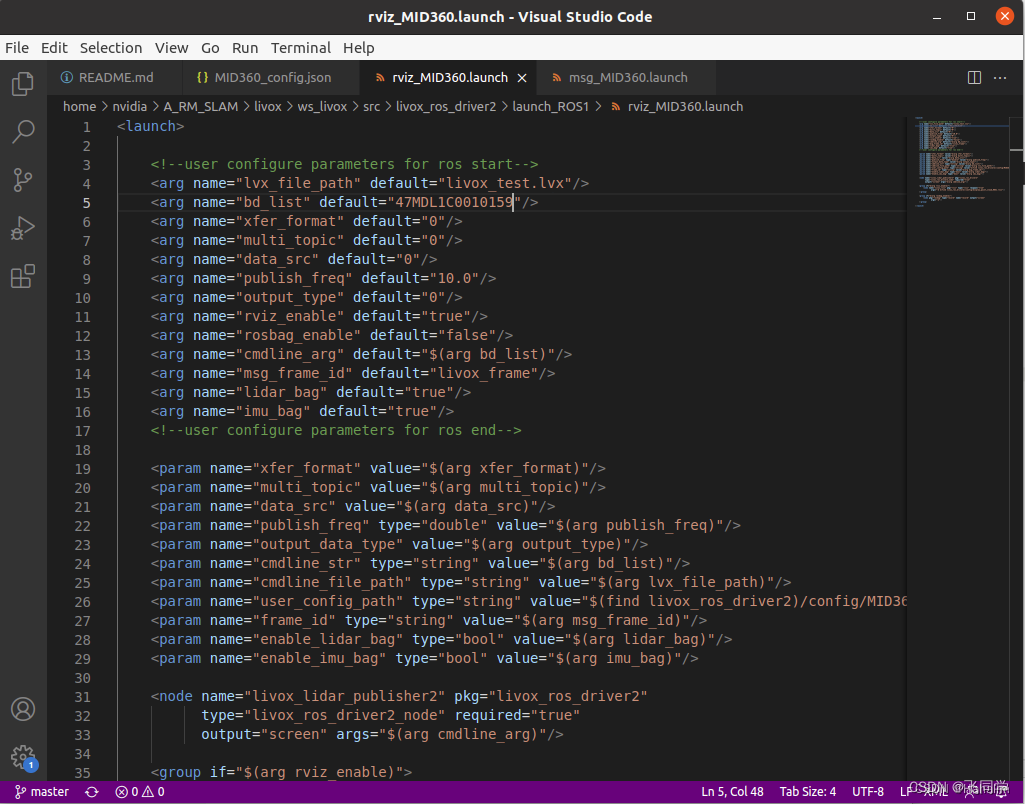
比如我的雷达广播码是47MDKBV0010244
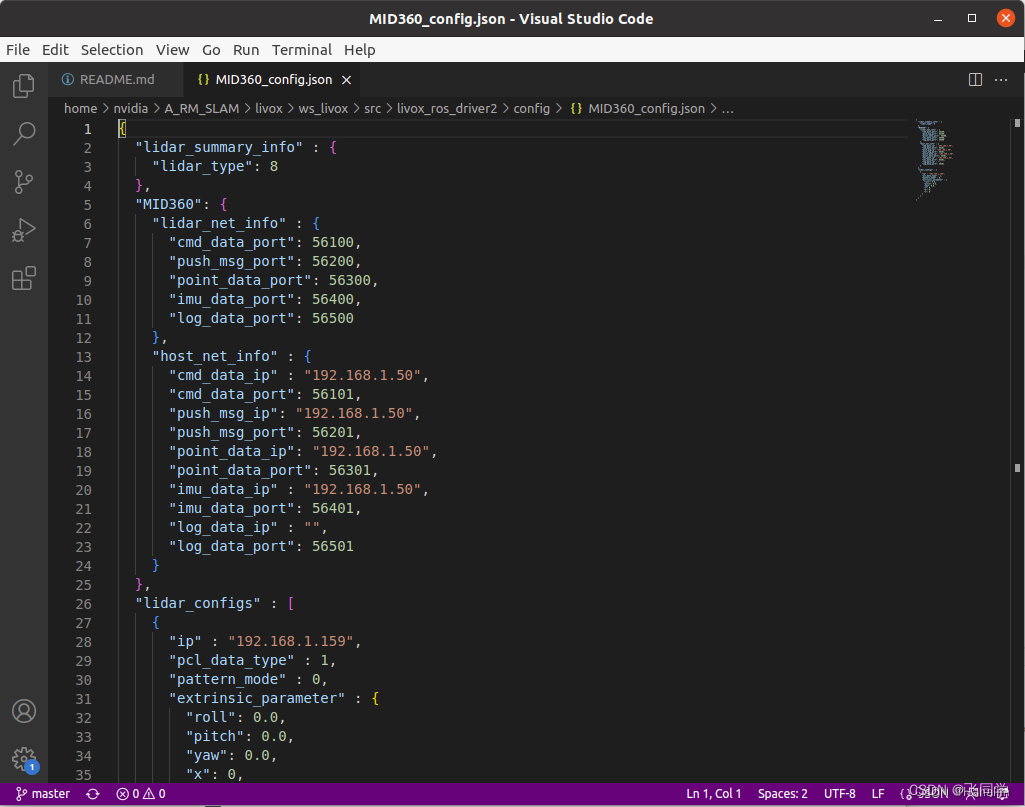
更改livox_ros_driver2/config/MID360_config.json文件内参数
ip改为雷达的ip,192.168.1.1** 最后两位为雷达S/N码最后两位数字
host_net_info改为本机以太网IP
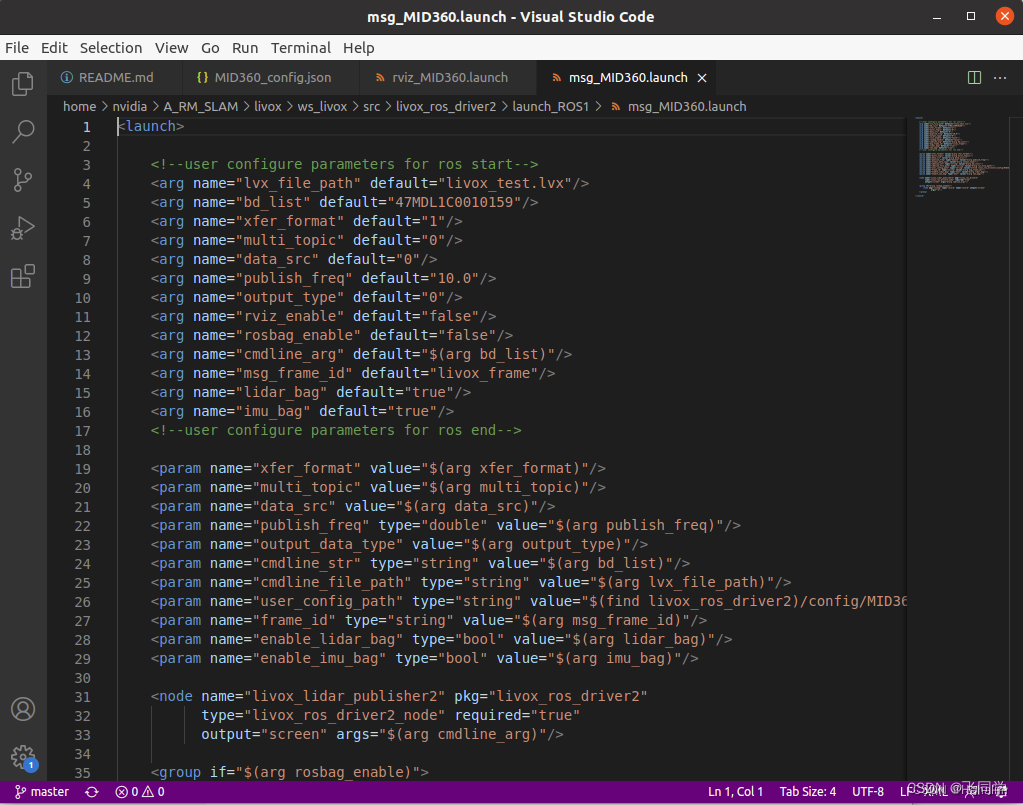
 更改livox_ros_driver2/launch_ROS1/msg_MID360.launch文件内参数
更改livox_ros_driver2/launch_ROS1/msg_MID360.launch文件内参数
更改livox_ros_driver2/launch_ROS1/rviz_MID360.launch文件内参数
https://gitee.com/xlhou/Livox-SDK2
https://gitee.com/wangdou2014/Livox-SDK
livox-sdk2 Livox-SDK版本不冲突,都要安装才能正常编译livox_ros_driver和livox_ros_driver2
git clone https://gitee.com/vell/Livox-SDK
git clone https://github.com/Livox-SDK/livox_ros_driver.git
*** No rule to make target ‘/usr/lib/x86_64-linux-gnu/libGL.so’, needed by *********************'. Stop.
这是由于动态库链接中断造成的,我们在相应的文件目录下看看该文件的状态
cd /usr/lib/x86_64-linux-gnu/
1.查找libxxx.so文件是否存在
2.查看该文件链接状态
3.修改其链接状态为正确形式
查看libgl.so链接关系正常情况 libGL.so -> libGL.so.1.0.0
ls -l libGL.so
如果不存在libgl.so,则手动创建
cd /usr/lib/x86_64-linux-gnu
sudo ln -s libGL.so.1.0.0 libGL.so这篇关于livox mid360 + fast-livo的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




![[目标检测]Fast RCNN算法详解](https://img-blog.csdn.net/20160414104600312)

