fast专题

每天一道面试题(2):fail-safe 机制与 fail-fast 机制分别有什么作用?
当谈论Java集合的 fail-fast 和 fail-safe 机制时,涉及的是在集合被并发修改时的行为和处理方式。这些机制对保证程序的正确性和稳定性非常重要,尤其是在多线程环境中。 1. Fail-Fast 机制 定义: Fail-fast 机制的核心是在检测到集合在遍历过程中被修改时,立即抛出 ConcurrentModificationException 异常,从而中断迭代操作。这种

UVa 11992 Fast Matrix Operations 线段树
UVa 11992 Fast Matrix Operations 题目大意:有一个r行c列的全0矩阵,支持三种操作: 1 x1 y1 x2 y2 v 子矩阵(x1,y1,x2,y2)的所有元素增加v(v > 0)。 2 x1 y1 x2 y2 v 子矩阵(x1,y1,x2,y2)的所有元素设为v(v > 0)。 3 x1 y1 x2 y2 查询子矩阵(x1,y1,x2,y2
【HDU】4965 Fast Matrix Calculation 矩阵快速幂
传送门:【HDU】4965 Fast Matrix Calculation 题目分析:因为比赛的时候写的太匆忙。。写的不堪入目,所以赛后重写了一次,顺便就贴一下了。 因为A*B=C,所以C^(N*N-1) = A*B*A*B*A*...*B*A*B,因为满足结合律所以变成A*( (B*A)^(N*N-2) )*B,因为中间得到的矩阵最大不超过K(K<=6),所以可以对中间的矩阵快速幂,然

Fast Image Cache
https://github.com/path/FastImageCache Fast Image Cache is an efficient, persistent, and—above all—fast way to store and retrieve images in your iOS application. Part of any good iOS applica
NCBI-get-GCFIDs_fast.py
import requestsimport osimport redef download_genome_first(gcf_id):# 构建FTP下载路径base_url = "https://ftp.ncbi.nlm.nih.gov/genomes/all/GCF/"# 提取GCF号的数字部分并按三位分割parts = gcf_id.split('_')[1] # 提取数字部分path_
Fast Power
Calculate the an % b where a, b and n are all 32bit non-negative integers. Example For 231 % 3 = 2 For 1001000 % 1000 = 0 Challenge O(logn) 思想:recursion算一半,然后base case,处理算完一半以后的情况; 公式就是 (a*b) %
fast-voice-assistant
首先我们来到这个据说50行代码就可以创建个人语音助手的github地址GitHub - dsa/fast-voice-assistant: ⚡ Insanely fast AI voice assistant with <500ms response times 按照readme 完成环境的配置 but,你发现,这只是第一步,真正的难点在于完成.env中各个key的配置 1)Using th
![[目标检测]Fast RCNN算法详解](https://img-blog.csdn.net/20160414104600312)
[目标检测]Fast RCNN算法详解
转载来自:http://blog.csdn.net/shenxiaolu1984/article/details/51036677 继2014年的RCNN之后,Ross Girshick在15年推出Fast RCNN,构思精巧,流程更为紧凑,大幅提升了目标检测的速度。在Github上提供了源码。 同样使用最大规模的网络,Fast RCNN和RCNN相比,训练时间从84小时减少为9.5小时

【译】PCL官网教程翻译(17):快速点特征直方图(FPFH)描述符 -Fast Point Feature Histograms (FPFH) descriptors
英文原文阅读 快速点特征直方图(FPFH)描述符 计算复杂度直方图(见点特征直方图(PFH)描述符)对于一个给定的有 n n n个点的点云 P P P为 O ( n k 2 ) O (nk ^ 2) O(nk2), k k k是每个点P的最邻近点个数。对于要求实时或接近实时的应用程序,密集点的特征直方图的计算效率是一个一个主要问题。 本教程描述了PFH公式的简化,称为快速点特征直方图(FPF

区域卷积神经网络(R-CNN,SPP-Net,Fast R-CNN,Faster R-CNN)
1 模型进化史 检测框架可分为两类: 两级式检测框架,包含一个用于区域提议的预处理步骤,使得整体流程是两级式的,如R-CNN系列单级式检测框架,即无区域提议的框架,这是一种单独提出的方法,不会将检测提议分开,使得整个流程是单级式的,如YOLO系列 2 传统的目标检测 2.1 三个阶段 区域选择利用不同尺寸的滑动窗口框住图中的某一部分作为候选区域。特征提取:提取候选区域相关的

20. Java中的fail-fast机制是什么?它是如何在集合中实现的?
Fail-Fast 机制是指在迭代器遍历集合的过程中,如果集合结构被修改(如添加、删除元素),迭代器会立即抛出 ConcurrentModificationException,从而快速失败(fail-fast),以防止出现不确定的行为或数据不一致的问题。 Fail-Fast 机制的目的是尽早检测并发修改错误(即在一个线程中遍历集合的同时,另一个线程修改了集合),从而帮助开发者发现和修复潜在的
用OpenCV实现FAST算法目标跟踪
点击下方卡片,关注“小白玩转Python”公众号主要工作:提取特征(角点)并使用FAST算法跟踪对象:OpenCV,Python OpenCV中有多种特征提取算法可供使用,但其中一种名为FAST算法的,对于实时计算机视觉应用来说非常有用。大多数特征提取和角点检测方法在提取特征方面表现良好,但它们大多数并不适合实时应用。 FAST算法非常适合实时计算机视觉任务。在本文中,我将解释FAST算法的工作
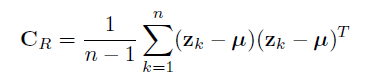
Region Covariance: A Fast Descriptor for Detection and Classification算法总结
传统的像素级特征比如颜色、梯度、滤波响应等等它们对光照变化和非刚性运动的描述不够鲁棒,而在像素级特征之上延伸出的直方图表述了一种无参的联合分布,然而随着特征数目的增加,联合分布的表达是呈指数增加的。另外,关键点的检测以及描述在匹配局部图像上非常有效,然而它们只包含了局部信息,没有利用全局的信息。 与直方图类似,协方差也能作为特征描述,并且协方差的特征维度要小很多。实验证明,协方差特征比其他特征性

Fast Neural Style在win10上运行
fast-neural-style-master(pytorch):https://github.com/pytorch/examples/tree/master/fast_neural_style(测试的该例子)fast-neural-style-tensorflow-master(tensorflow):https://github.com/hzy46/fast-neural-style-te
如何在算家云搭建模型Stable-Fast-3D(3D模型生成)
一、模型介绍 Stable-Fast-3D 具有 UV 展开和照明解缠的稳定快速 3D 网格重建,它是一种从单个图像进行快速前馈 3D 网格重建的最先进的开源模型。 二、模型搭建流程 基础环境最低要求说明: 环境名称版本信息1Ubuntu22.04.4 LTSCudaV12.1.105Python3.12NVIDIA CorporationRTX 3090 1. 根据需求选择主机和镜像,

Fast ORB-SLAM
点云PCL免费知识星球,点云论文速读。 文章:FastORB-SLAM: Fast ORB-SLAM method with Coarse-to-Fine Descriptor Independent Keypoint Matching 作者:Qiang Fu12, Hongshan Yu1 , Xiaolong Wang 翻译:particle 本文仅做学术分享,如有侵权,请联系删除。欢迎各位
lightoj 1032 - Fast Bit Calculations (数位DP)
记忆花搜索:dp[len][num][last] : 现在处理第len位,前面有num个11,并且最后一位为last。 /************************************************ Author: fisty* Created Time: 2015-08-18 20:18:09* File Name : 1032.cpp***************

CV-笔记-重读Fast R-CNN的ROI pooling
目录 1 原图上的ROI坐标如何映射到feature map上?2 ROI Pooling是如何做?3 ROI Pooling的梯度反向传播是怎么做的?4 那么多的ROI Pooling做完以后是怎么进入到全连接层进行训练的?5 正负样本怎么制作?6 loss怎么计算?smooth L1 7回归的数值是什么?引用 Fast R-CNN主要是使用了一个ROI Pooling操作来对候
fast rcnn中遇到的问题
碰到了out of memory的情况,可能有两方面原因: 1、别人在用GPU; 2、model太大,跑不起来。 如果是第一个原因,可以告知别人在跑程序时指定GPU,因为不指定的话默认占用所有的GPU。 如果是第二个原因,可以换一个小一点的model。比如,fast rcnn中有vgg16,caffenet,vgg_cnn_m_1024,如果vgg16遇到out of memory的情况,

fast rcnn 训练自己的数据集(训练和检测)
转载请注明出处,楼燚(yì)航的blog,http://www.cnblogs.com/louyihang-loves-baiyan/ http://github.com/YihangLou/fast-rcnn-train-another-dataset 这是楼主 在github上修改的几个文件的链接 在之前两篇文章中我介绍了怎么编译Fast RCNN,和怎么修改Fast

fast rcnn训练自己的数据集(修改读写接口)
转载请注明出处,楼燚(yì)航的blog,http://www.cnblogs.com/louyihang-loves-baiyan/ https://github.com/YihangLou/fast-rcnn-train-another-dataset 这是楼主在github上修改的几个文件的链接 这里楼主讲解了如何修改Fast RCNN训练自己的数据集,首先请确保你已经安装

fast rcnn 训练自己的数据集(编译环境配置)
FastRCNN 训练自己数据集 (1编译配置) 转载请注明出处,楼燚(yì)航的blog,http://www.cnblogs.com/louyihang-loves-baiyan/ http://github.com/YihangLou/fast-rcnn-train-another-dataset 这是楼主在github上修改的几个文件的链接 FastRCNN是Ross Gir

论文笔记 Fast R-CNN细节
当我决心认真地看Faster R-CNN代码的时候,我就觉得有必要把 Fast R-CNN的论文的细节再从新完整地看一遍了。对,是细节,如何实现的部分,于是有了此篇博客。请注意是 Fast R-CNN笔记。 其网络结构流程如上图,将整个图片输入卷积层和pooling层,得到卷积层特征图。然后针对每一个proposal带来的感兴趣区域RoI,通过RoI pooling layer得到在特征图
Andorid中使用Gson和Fast-json解析库解析JSON数据---第三方库学习笔记(二)
JSON介绍: JSON:JavaScript对象表示法 JSON是存储和交换文本信息的语法。 特点: JSON是轻量级的文本数据交换格式JSON独立于语言和平台JSON具有自我描述性,更易理解 JSON与XML比较: 类似XML,比XML更小、更快、更易解析没有结束标签更短读写速度更快使用数组不使用保留字 JSON语法: 数据在名称/值对中数据有逗号分隔花括号保存对象 方括号保存数组
5.How Fast Should You Be When Learning?(你应该用多快的速度学习? (一))
Normally when I talk about learing quickly, I’m using speed as a synonym for efficiency.Use more effective methods and you’ll learn more in less time.All else being equal, that means you’re learing fa
【GNU笔记】内联函数与宏一样快 An Inline Function is As Fast As a Macro
内联函数与宏一样快 An Inline Function is As Fast As a Macro 通过声明内联函数,你可以指示 GCC 更快地调用该函数。GCC 可以实现这一点的一种方法是将该函数的代码集成到其调用者的代码中。这通过消除函数调用开销使执行速度更快;此外,如果任何实际参数值是常量,则它们的已知值可能允许在编译时进行简化,因此不需要包含所有内联函数的代码。对代码大小的影响是难以预