本文主要是介绍ubuntu16下利用loam_livox建图,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
0 引言
最近在学习slam建图,想尝试使用大疆mid40利用loam_livox来进行建图,整个过程中遇到了特别多的坑,重装了五六次系统,所幸尝试之前将系统镜像了。
这个算法不需要里程计,利用激光雷达发布的实时点云信息或者录制的bag包均可实时建图。
loam_livox建图需要安装ceres_solver、eigen3、pcl1.9。个人感觉最困难的地方就在这里,pcl版本官方是给定了的,需要将ubuntu16自带的pcl1.7升级为pcl1.9,而ceres_slover与eigen3的版本是没有给的,版本不对应便无法编译成功,找了大半天,最后发现安装ceres_slover1.14.0与eigen3.3.7是可以跑通算法的。而我在利用cartographer进slam建图时,安装的ceres_slover1.11.0以及eigen3.2.92,采用正常的安装方法,两者只能跑一个,因此花了很多时间研究多版本兼容的问题。
现将整个过程记录下来,供自己与大家参考。
1 源码下载
1.1 为loam_livox建立的工作空间
mkdir -p ~/loam_ws/src
cd ~/loam_ws/src
catkin_init_workspace
1.2 loam_livox下载
git clone https://github.com/hku-mars/loam_livox.git
1.3 安装依赖
sudo apt-get install ros-kinetic-cv-bridge ros-kinetic-tf ros-kinetic-message-filters ros-kinetic-image-transport2 eigen3.3.7安装
2.1 源码下载
从下面这个网站中下载压缩包后解压到主目录
https://gitlab.com/libeigen/eigen/-/tree/3.3.7
2.2 编译
采用正常编译方式会将eigen编译到/usr/local/include下,而此目录已有我此前安装的eigen3.2.92,因此需将它安装在自己的指定目录下。
cd ~/eigen-3.3.7
mkdir build
mkdir eigen_loam
随后
cd build
cmake -DCMAKE_INSTALL_PREFIX="/home/lww/eigen-3.3.7/eigen_loam/" ..
注:这里build文件夹用来存放编译产生的文件,eigen_loam用来作为eigen的安装位置
make
sudo make install
安装成功
此时会发现eigen_loam文件夹中include文件下有eigen3文件,将它复制一份,重命名为eigen337,再复制到/usr/local/include/下
cd ~/eigen-3.3.7/eigen_loam/include
sudo cp -R eigen337 /usr/local/include/
至此,eigen3.3.7安装成功
3 ceres_solver1.14.0安装
3.1 源码下载
github上下载压缩包后解压到主目录
https://github.com/ceres-solver/ceres-solver/releases/tag/1.14.0
3.2 编译
cd ~/ceres-solver-1.14.0
mkdir build
mkdir cere_loam
由于cere-solver-1.14.0必须依赖于eigen3.3.7,无法采用eigen3.2.92编译,而默认目录下安装的是eigen3.2.92,因此需要为ceres指定eigen3.3.7安装目录,我们在上面已经将eigen3.3.7复制到了/usr/local/include下面,修改一下路径即可。
3.2.1 修改CMakeLists.txt文件
sudo gedit CMakeLists.txt
在find_package(Eigen REQUIRED)前加入
set(EIGEN_DIR /usr/local/include/eigen337)
3.2.2 修改FindEigen.cmake
cd cmake
sudo gedit FindEigen.cmake
修改如下所示,对比原文件参照:
# Ceres Solver - A fast non-linear least squares minimizer
# Copyright 2015 Google Inc. All rights reserved.
# http://ceres-solver.org/
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions are met:
#
# * Redistributions of source code must retain the above copyright notice,
# this list of conditions and the following disclaimer.
# * Redistributions in binary form must reproduce the above copyright notice,
# this list of conditions and the following disclaimer in the documentation
# and/or other materials provided with the distribution.
# * Neither the name of Google Inc. nor the names of its contributors may be
# used to endorse or promote products derived from this software without
# specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
# AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
# IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
# ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
# LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
# CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
# SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
# INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
# CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
# ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
# POSSIBILITY OF SUCH DAMAGE.
#
# Author: alexs.mac@gmail.com (Alex Stewart)
## FindEigen.cmake - Find Eigen library, version >= 3.
#
# This module defines the following variables:
#
# EIGEN_FOUND: TRUE iff Eigen is found.
# EIGEN_INCLUDE_DIRS: Include directories for Eigen.
# EIGEN_VERSION: Extracted from Eigen/src/Core/util/Macros.h
# EIGEN_WORLD_VERSION: Equal to 3 if EIGEN_VERSION = 3.2.0
# EIGEN_MAJOR_VERSION: Equal to 2 if EIGEN_VERSION = 3.2.0
# EIGEN_MINOR_VERSION: Equal to 0 if EIGEN_VERSION = 3.2.0
# FOUND_INSTALLED_EIGEN_CMAKE_CONFIGURATION: True iff the version of Eigen
# found was built & installed /
# exported as a CMake package.
#
# The following variables control the behaviour of this module:
#
# EIGEN_PREFER_EXPORTED_EIGEN_CMAKE_CONFIGURATION: TRUE/FALSE, iff TRUE then
# then prefer using an exported CMake configuration
# generated by Eigen over searching for the
# Eigen components manually. Otherwise (FALSE)
# ignore any exported Eigen CMake configurations and
# always perform a manual search for the components.
# Default: TRUE iff user does not define this variable
# before we are called, and does NOT specify
# EIGEN_INCLUDE_DIR_HINTS, otherwise FALSE.
# EIGEN_INCLUDE_DIR_HINTS: List of additional directories in which to
# search for eigen includes, e.g: /timbuktu/eigen3.
#
# The following variables are also defined by this module, but in line with
# CMake recommended FindPackage() module style should NOT be referenced directly
# by callers (use the plural variables detailed above instead). These variables
# do however affect the behaviour of the module via FIND_[PATH/LIBRARY]() which
# are NOT re-called (i.e. search for library is not repeated) if these variables
# are set with valid values _in the CMake cache_. This means that if these
# variables are set directly in the cache, either by the user in the CMake GUI,
# or by the user passing -DVAR=VALUE directives to CMake when called (which
# explicitly defines a cache variable), then they will be used verbatim,
# bypassing the HINTS variables and other hard-coded search locations.
#
# EIGEN_INCLUDE_DIR: Include directory for CXSparse, not including the
# include directory of any dependencies.# Called if we failed to find Eigen or any of it's required dependencies,
# unsets all public (designed to be used externally) variables and reports
# error message at priority depending upon [REQUIRED/QUIET/<NONE>] argument.
macro(EIGEN_REPORT_NOT_FOUND REASON_MSG)unset(EIGEN_FOUND)unset(EIGEN_INCLUDE_DIRS)unset(FOUND_INSTALLED_EIGEN_CMAKE_CONFIGURATION)# Make results of search visible in the CMake GUI if Eigen has not# been found so that user does not have to toggle to advanced view.mark_as_advanced(CLEAR EIGEN_INCLUDE_DIR)# Note <package>_FIND_[REQUIRED/QUIETLY] variables defined by FindPackage()# use the camelcase library name, not uppercase.if (Eigen_FIND_QUIETLY)message(STATUS "Failed to find Eigen - " ${REASON_MSG} ${ARGN})elseif (Eigen_FIND_REQUIRED)message(FATAL_ERROR "Failed to find Eigen - " ${REASON_MSG} ${ARGN})else()# Neither QUIETLY nor REQUIRED, use no priority which emits a message# but continues configuration and allows generation.message("-- Failed to find Eigen - " ${REASON_MSG} ${ARGN})endif ()return()
endmacro(EIGEN_REPORT_NOT_FOUND)# Protect against any alternative find_package scripts for this library having
# been called previously (in a client project) which set EIGEN_FOUND, but not
# the other variables we require / set here which could cause the search logic
# here to fail.
unset(EIGEN_FOUND)# -----------------------------------------------------------------
# By default, if the user has expressed no preference for using an exported
# Eigen CMake configuration over performing a search for the installed
# components, and has not specified any hints for the search locations, then
# prefer an exported configuration if available.
if (NOT DEFINED EIGEN_PREFER_EXPORTED_EIGEN_CMAKE_CONFIGURATIONAND NOT EIGEN_INCLUDE_DIR_HINTS)message(STATUS "No preference for use of exported Eigen CMake configuration ""set, and no hints for include directory provided. ""Defaulting to preferring an installed/exported Eigen CMake configuration ""if available.")set(EIGEN_PREFER_EXPORTED_EIGEN_CMAKE_CONFIGURATION TRUE)
endif()if (EIGEN_PREFER_EXPORTED_EIGEN_CMAKE_CONFIGURATION)# Try to find an exported CMake configuration for Eigen.## We search twice, s/t we can invert the ordering of precedence used by# find_package() for exported package build directories, and installed# packages (found via CMAKE_SYSTEM_PREFIX_PATH), listed as items 6) and 7)# respectively in [1].## By default, exported build directories are (in theory) detected first, and# this is usually the case on Windows. However, on OS X & Linux, the install# path (/usr/local) is typically present in the PATH environment variable# which is checked in item 4) in [1] (i.e. before both of the above, unless# NO_SYSTEM_ENVIRONMENT_PATH is passed). As such on those OSs installed# packages are usually detected in preference to exported package build# directories.## To ensure a more consistent response across all OSs, and as users usually# want to prefer an installed version of a package over a locally built one# where both exist (esp. as the exported build directory might be removed# after installation), we first search with NO_CMAKE_PACKAGE_REGISTRY which# means any build directories exported by the user are ignored, and thus# installed directories are preferred. If this fails to find the package# we then research again, but without NO_CMAKE_PACKAGE_REGISTRY, so any# exported build directories will now be detected.## To prevent confusion on Windows, we also pass NO_CMAKE_BUILDS_PATH (which# is item 5) in [1]), to not preferentially use projects that were built# recently with the CMake GUI to ensure that we always prefer an installed# version if available.## [1] http://www.cmake.org/cmake/help/v2.8.11/cmake.html#command:find_packagefind_package(Eigen3 QUIETNO_MODULENO_CMAKE_PACKAGE_REGISTRYNO_CMAKE_BUILDS_PATH)if (EIGEN3_FOUND)message(STATUS "Found installed version of Eigen: ${Eigen3_DIR}")else()# Failed to find an installed version of Eigen, repeat search allowing# exported build directories.message(STATUS "Failed to find installed Eigen CMake configuration, ""searching for Eigen build directories exported with CMake.")# Again pass NO_CMAKE_BUILDS_PATH, as we know that Eigen is exported and# do not want to treat projects built with the CMake GUI preferentially.find_package(Eigen3 QUIETNO_MODULENO_CMAKE_BUILDS_PATH)if (EIGEN3_FOUND)message(STATUS "Found exported Eigen build directory: ${Eigen3_DIR}")endif()endif()if (EIGEN3_FOUND)set(FOUND_INSTALLED_EIGEN_CMAKE_CONFIGURATION TRUE)set(EIGEN_FOUND ${EIGEN3_FOUND})set(EIGEN_INCLUDE_DIR "${EIGEN3_INCLUDE_DIR}" CACHE STRING"Eigen include directory" FORCE)else()message(STATUS "Failed to find an installed/exported CMake configuration ""for Eigen, will perform search for installed Eigen components.")endif()
endif()if (NOT EIGEN_FOUND)# Search user-installed locations first, so that we prefer user installs# to system installs where both exist.list(APPEND EIGEN_CHECK_INCLUDE_DIRS/usr/local/include/usr/local/homebrew/include # Mac OS X/opt/local/var/macports/software # Mac OS X./opt/local/include/usr/include/usr/local/include/eigen337)# Additional suffixes to try appending to each search path.list(APPEND EIGEN_CHECK_PATH_SUFFIXESeigen3 # Default root directory for Eigen.Eigen/include/eigen3 # Windows (for C:/Program Files prefix) < 3.3Eigen3/include/eigen3 ) # Windows (for C:/Program Files prefix) >= 3.3# Search supplied hint directories first if supplied.find_path(EIGEN_INCLUDE_DIRNAMES Eigen/CoreHINTS ${EIGEN_INCLUDE_DIR_HINTS}PATHS $"/usr/local/include/eigen337"PATH_SUFFIXES ${EIGEN_CHECK_PATH_SUFFIXES})if (NOT EIGEN_INCLUDE_DIR ORNOT EXISTS ${EIGEN_INCLUDE_DIR})eigen_report_not_found("Could not find eigen3 include directory, set EIGEN_INCLUDE_DIR to ""path to eigen3 include directory, e.g. /usr/local/include/eigen337.")endif (NOT EIGEN_INCLUDE_DIR ORNOT EXISTS ${EIGEN_INCLUDE_DIR})# Mark internally as found, then verify. EIGEN_REPORT_NOT_FOUND() unsets# if called.set(EIGEN_FOUND TRUE)
endif()# Extract Eigen version from Eigen/src/Core/util/Macros.h
if (EIGEN_INCLUDE_DIR)set(EIGEN_VERSION_FILE /usr/local/include/eigen337/Eigen/src/Core/util/Macros.h)if (NOT EXISTS ${EIGEN_VERSION_FILE})eigen_report_not_found("Could not find file: ${EIGEN_VERSION_FILE} ""containing version information in Eigen install located at: ""${EIGEN_INCLUDE_DIR}.")else (NOT EXISTS ${EIGEN_VERSION_FILE})file(READ ${EIGEN_VERSION_FILE} EIGEN_VERSION_FILE_CONTENTS)string(REGEX MATCH "#define EIGEN_WORLD_VERSION [0-9]+"EIGEN_WORLD_VERSION "${EIGEN_VERSION_FILE_CONTENTS}")string(REGEX REPLACE "#define EIGEN_WORLD_VERSION ([0-9]+)" "\\1"EIGEN_WORLD_VERSION "${EIGEN_WORLD_VERSION}")string(REGEX MATCH "#define EIGEN_MAJOR_VERSION [0-9]+"EIGEN_MAJOR_VERSION "${EIGEN_VERSION_FILE_CONTENTS}")string(REGEX REPLACE "#define EIGEN_MAJOR_VERSION ([0-9]+)" "\\1"EIGEN_MAJOR_VERSION "${EIGEN_MAJOR_VERSION}")string(REGEX MATCH "#define EIGEN_MINOR_VERSION [0-9]+"EIGEN_MINOR_VERSION "${EIGEN_VERSION_FILE_CONTENTS}")string(REGEX REPLACE "#define EIGEN_MINOR_VERSION ([0-9]+)" "\\1"EIGEN_MINOR_VERSION "${EIGEN_MINOR_VERSION}")# This is on a single line s/t CMake does not interpret it as a list of# elements and insert ';' separators which would result in 3.;2.;0 nonsense.set(EIGEN_VERSION "${EIGEN_WORLD_VERSION}.${EIGEN_MAJOR_VERSION}.${EIGEN_MINOR_VERSION}")endif (NOT EXISTS ${EIGEN_VERSION_FILE})
endif (EIGEN_INCLUDE_DIR)# Set standard CMake FindPackage variables if found.
if (EIGEN_FOUND)set(EIGEN_INCLUDE_DIRS ${EIGEN_INCLUDE_DIR})
endif (EIGEN_FOUND)# Handle REQUIRED / QUIET optional arguments and version.
include(FindPackageHandleStandardArgs)
find_package_handle_standard_args(EigenREQUIRED_VARS EIGEN_INCLUDE_DIRSVERSION_VAR EIGEN_VERSION)# Only mark internal variables as advanced if we found Eigen, otherwise
# leave it visible in the standard GUI for the user to set manually.
if (EIGEN_FOUND)mark_as_advanced(FORCE EIGEN_INCLUDE_DIREigen3_DIR) # Autogenerated by find_package(Eigen3)
endif (EIGEN_FOUND)
3.2.3 编译
cd ~/ceres-solver-1.14.0/build
cmake -DCMAKE_INSTALL_PREFIX="/home/lww/ceres-solver-1.14.0/ceres_loam/" ..
make -j4
sudo make install
编译成功
4 pcl1.9安装
4.1 安装依赖
sudo apt-get updatesudo apt-get install git build-essential linux-libc-devsudo apt-get install cmake cmake-guisudo apt-get install libusb-1.0-0-dev libusb-dev libudev-devsudo apt-get install mpi-default-dev openmpi-bin openmpi-common sudo apt-get install libflann1.8 libflann-devsudo apt-get install libeigen3-devsudo apt-get install libboost-all-devsudo apt-get install libvtk5.10-qt4 libvtk5.10 libvtk5-devsudo apt-get install libqhull* libgtest-devsudo apt-get install freeglut3-dev pkg-configsudo apt-get install libxmu-dev libxi-devsudo apt-get install mono-completesudo apt-get install qt-sdk openjdk-8-jdk openjdk-8-jre
4.2 源码下载
github上下载压缩包后解压到主目录下
https://github.com/PointCloudLibrary/pcl/releases
4.3 编译
cd ~/pcl-pcl-1.9.0
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=None -DCMAKE_INSTALL_PREFIX=/usr \-DBUILD_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON \-DCMAKE_INSTALL_PREFIX=/usr ..
make -j4
sudo make install
安装成功
5 loam_livox源码编译
5.1 修改loam_livox的CMakeLists.txt文件
cd ~/loam_ws/src/loam_livox
sudo gedit CMakeLists.txt
需修改部分如下所示
find_package(Eigen3 REQUIRED)
find_package(OpenCV REQUIRED)
find_package(Ceres 1.14.0 REQUIRED PATHS /home/lww/ceres-solver-1.14.0/ceres_loam NO_DEFAULT_PATH)
#find_package(Ceres REQUIRED)
find_package(PCL 1.9 REQUIRED)
5.2 源码编译
cd ~/loam_ws
catkin_make
6 loam_livox试跑
6.1 下载官方bag包
在下方链接中下载CYT_02.bag,放至主目录下
https://drive.google.com/drive/folders/1HWomWWPSEVvka2QVB2G41iRvSwIt5NWf
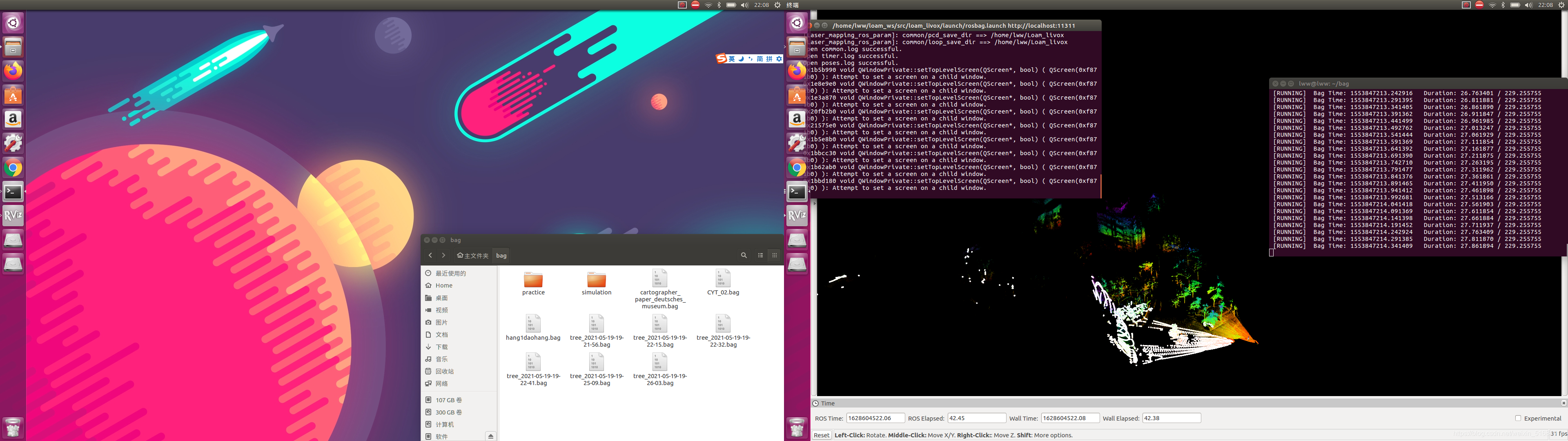
6.2 试跑
source ~/loam_ws/devel/setup.bash
roslaunch loam_livox rosbag.launch
另起终端
rosbag play CYT_02.bag
建图成功
可用自己录制的bag包进行试验
这篇关于ubuntu16下利用loam_livox建图的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



