loam专题

A-loam源码注释-头文件lidarFactor.hpp
本篇博客是A-loam学习的笔记,用于SLAM初学者一起学习。 lidarFactor.hpp #include <ceres/ceres.h> #include <ceres/rotation.h> #include <eigen3/Eigen/Dense> #include <pcl/point_cloud.h> #include <pcl/point_types.h> #include

SC-A-LOAM:在A-LOAM中加入回环检测
Thanks to LOAM, A-LOAM, and LIO-SAM code authors. The major codes in this repository are borrowed from their efforts. 代码:https://github.com/gisbi-kim/SC-A-LOAM 编译:点云PCL 本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识

A-loam建图算法
A-LOAM构建3d点云地图并实时转存二维栅格地图 A-loam算法。源代码用的是velodyne雷达话题,但是现在用rslidar来处理。所以也会遇到另外一个包来转换相关的数据。 git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git https://github.com/HViktorTsoi/rs_to_velody
lego-loam算法实现
参考:3、速腾16线激光雷达RS-16 ----- 3D建图算法LeGO-LOAM的使用(Ubuntu18.04 + ROS Melodic) 仿真阿克曼小车+3D激光雷达velodyne并使用lego-LOAM与octomap建图 A-LOAM/LOAM/Lego-LOAM/SC_Lego_LOAM实时构建3d点云地图与2d栅格地图(octomap) lego-loam建立栅格地图并保存
从零入门激光SLAM(十三)——LeGo-LOAM源码超详细解析4
大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。随着知识的越来越多,越来越细,我准备整理一个自己的激光SLAM学习笔记专栏,从0带大家快速上手激光SLAM,也方便想入门SLAM的同学和小白学习参考,相信看完会有一定的收获。如有不对的地方欢迎指出,欢迎各位大佬交流讨论,一起进步。博主创建了一个科研互助群****Q:772356582
使用ZVISION进行LOAM建图
一些需要注意的点: 1、remap的正确使用方法:在launch文件中,要在对应的node标签下使用remap标签才能将source_topic映射为goal_topic <node name="cloud_node" pkg="zvision_lidar_pointcloud" type="cloud_node" output="screen" ><param name="model"
LOAM系列——ALOAM配置、安装、问题解决及VLP16测试效果以及关键记录
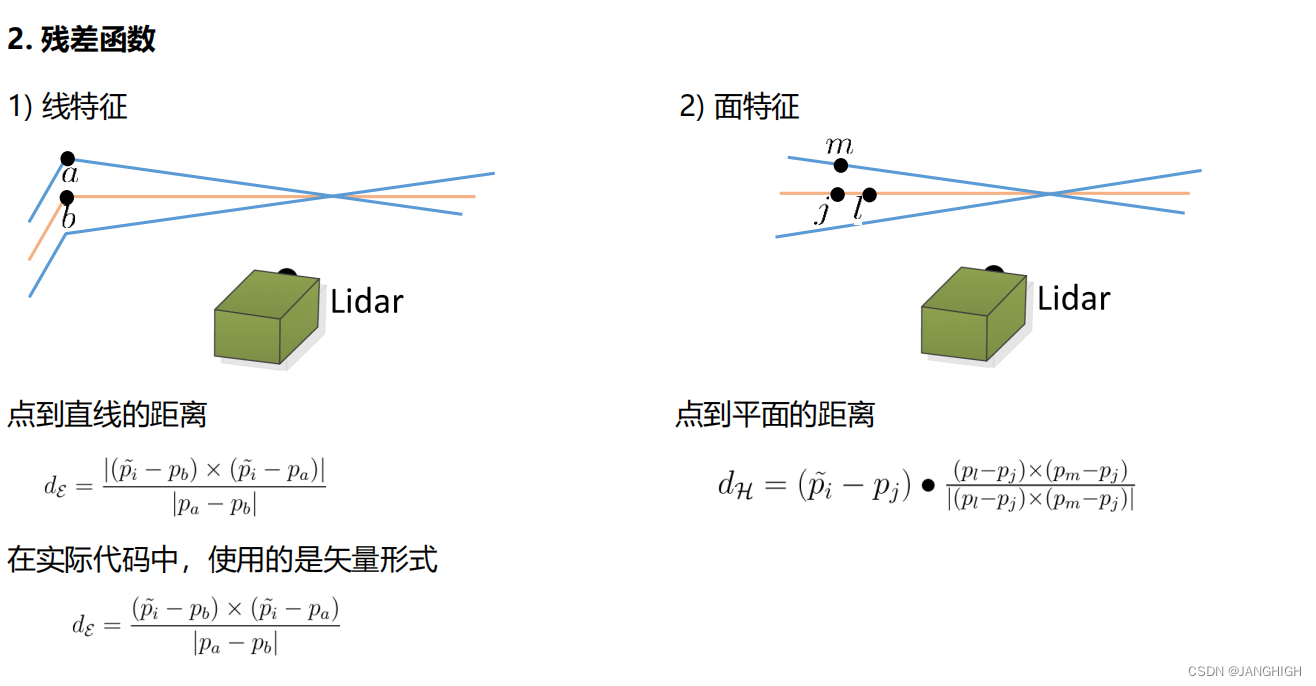
LOAM系列——ALOAM配置、安装、问题解决及VLP16测试效果以及关键记录 安装依赖安装bag包测试问题解决问题1解决1 关键记录A-LOAM主要特点残差关键代码 安装依赖 rosCeres SolverPCL 安装 cd ~/catkin_ws/srcgit clone https://github.com/HKUST-Aerial-Robotics/A-LO
![运行lego_loam报错[mapOptmization-7] process has died [pid 11653, exit code 127, cmd /home/p/legoloam/dev](https://img-blog.csdnimg.cn/4ed6a35b5dcd41c095ec99c9a9a7ca38.png#pic_center)
运行lego_loam报错[mapOptmization-7] process has died [pid 11653, exit code 127, cmd /home/p/legoloam/dev
运行lego_loam时报错 网上说因为没有把动态链接库的安装路径(例如 /usr/local/lib )放到变量 LD_LIBRARY_PATH 里 可在.bashrc中添加 export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/lib 也可以运行时 export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/us
跑通A-LOAM并保存点云地图!
本文旨在帮助读者迅速跑通3D激光SLAM算法A-LOAM!代码解读请参考笔者专栏: A-LOAM源码详解,激光雷达配置参考单、双激光雷达启动与双激光雷达的外参标定(VLP-16)。 废话不多说,直接开始! 一、A-LOAM安装 A-LOAM需要用到ceres库与pcl库,请确保已完成安装。 A-LOAM下载编译: #创建工作空间mkdir -p ~/aloam_ws/srccd ~


ubuntu20.04跑A-LOAM代码实测
1.首先前提已经按照上一篇文章已经安装好了ROS,接下来请跟我一起来跑一下这个算法, 点开这个Github开源地址:https://github.com/HKUST-Aerial-Robotics/A-LOAM 首先根据代码要求,需要提前安装两个,Ceres和PCL。 2.点击Ceres,这里会出现其网站,然后你会发现,给的克隆地址一直显示无法连接,这里直接点You can start wi
(Lidar SLAM 论文)LOAM: Lidar Odometry and Mapping in Real-time
摘要 我们提出了一种利用2轴激光雷达在6自由度范围内的距离测量进行里程测量和地图绘制的实时方法。这个问题很难解决,因为距离测量是在不同的时间接收的,运动估计中的错误可能会导致结果点云的错误配准。迄今为止,可以通过离线批处理方法构建连贯的3D地图,通常使用回环来校正随时间的漂移。我们的方法实现了低漂移和低计算复杂度,无需高精度测距或惯性测量。获得这一性能水平的关键思想是通过两种算法来划分同时定位和

Ubuntu20.04下A-LOAM配置安装及测试教程(包含报错问题踩坑)
参考文章: ubuntu20.04下ros运行A-LOAM Ubuntu20.04下运行LOAM系列:A-LOAM、LeGO-LOAM、SC-LeGO-LOAM、LIO-SAM 和 LVI-SAM 需要学习源码的同学可以下载LOAM论文 LOAM论文链接 1.需要安装的库文件 1.1Eigen 3.3 可以直接使用apt命令安装,或者去官网下载源码安装 sudo apt-get i
LeGO-LOAM 几个特有函数的分析(2)
接上回LeGO-LOAM 几个特有函数的分析(1) 二、广度优先遍历 广度优先遍历(Breadth-First Search, BFS)是一种用于遍历或搜索树或图的算法。这种算法从树的根(或图的某一指定节点)开始,然后探索邻近的节点,之后对每一个邻近的节点,它再去探索它们各自相邻的节点,这个过程持续进行直到访问所有可达的节点。 广度优先遍历的主要特点是它按照距离起始点的“层次”来遍历。首先访
LOAM: Lidar Odometry and Mapping in Real-time 论文阅读
论文链接 LOAM: Lidar Odometry and Mapping in Real-time 0. Abstract 提出了一种使用二维激光雷达在6自由度运动中的距离测量进行即时测距和建图的方法 距离测量是在不同的时间接收到的,并且运动估计中的误差可能导致生成的点云的错误配准 本文的方法在不需要高精度测距或惯性测量的情况下同时实现了低漂移和低计算复杂性关键思想是将同时定

Ubuntu18.04安装A-Loam保姆级教程
系统环境:Ubuntu18.04.6 LTS 1.A-Loam的安装前要求: 1.1 ROS安装:参考我的另一篇博客 Ubuntu18.04安装ROS-melodic保姆级教程_灬杨三岁灬的博客-CSDN博客还是那句话,有时候加了这行也不好使,我是疯狂试了20+次,最后打了一局游戏,回来就过了,这就得看网络看命了,不行就在网上搜搜终极大招(动手能力差的不建议)。有时候加了这行也不好使,我是

工程(一)Lego_Loam安装调试及运行
一、LeGO _LOAM安装 # 下载gtsam cd ~git clone https://bitbucket.org/gtborg/gtsam.git #编译 cd ~/gtsammkdir buildcd buildcmake ..make check #可选的,运行单元测试,我没执行这个命令,因为在TX2上编译太慢了,太慢了,太慢了make install #
lego-loam 同步构建2d栅格导航地图
lego-loam 同步构建2d栅格导航地图 3d点云预处理keypose保存根据闭环条件更新2d map构建和2d map总结 基于目前移动机器人的应用可知,目前3d slam存储的主要为点云地图,由于其特征点比2D激光器数据更加丰富,因此用于后期的定位具有更好的抗干扰性和鲁棒性。但是用于导航的基本路径规划功能,目前仍主要依赖于2d栅格地图。 其中16年开源的cartogra

VLP-16跑通Lego-LOAM
VLP-16跑通Lego-LOAM Ubuntu18.04环境下配置及步骤VLP-16雷达的使用Lego-LOAM的安装配置VLP-16需要的改动: Ubuntu18.04环境下配置及步骤 在各个总结文章的基础上记录一下各个步骤的细节 VLP-16雷达的使用 配置问题首推博客!Velodyne VLP16激光雷达的使用(非常详细) 内容包括以下: 硬件连接、依赖安装;
LOAM源代码分析附公式推导之MultiScanRegistration
LOAM源代码分析附公式推导 更新日志1. 概述2. 前言3. 准备工作3.1 激光雷达3.2 IMU3.3 坐标变换 4. 插话5. 之MultiScanRegistration5.1 参数配置5.2 话题订阅5.3 IMU数据处理5.4 点云数据处理5.4.1 点云数据5.4.2 近似匀速运动模型5.4.3 特征提取5.4.4 打包IMU数据 5.5发布数据 更新日志 更新日志
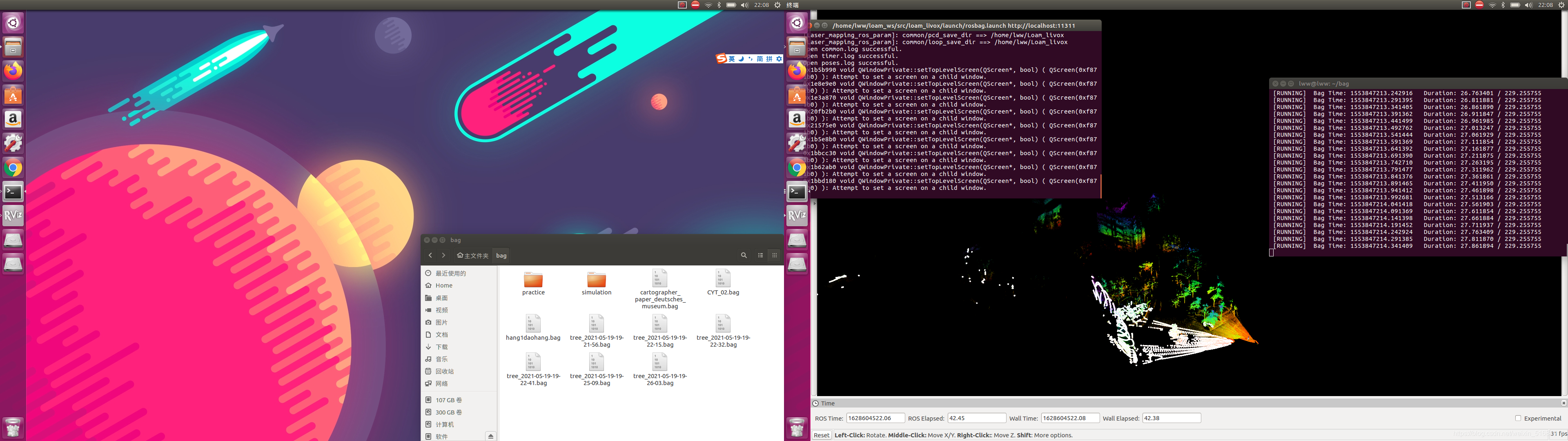
ubuntu16下利用loam_livox建图
0 引言 最近在学习slam建图,想尝试使用大疆mid40利用loam_livox来进行建图,整个过程中遇到了特别多的坑,重装了五六次系统,所幸尝试之前将系统镜像了。 这个算法不需要里程计,利用激光雷达发布的实时点云信息或者录制的bag包均可实时建图。 loam_livox建图需要安装ceres_solver、eigen3、pcl1.9。个人感觉最
在ubuntu20.04下编译并运行Point-LIO、FAST_LIO2、Faster-LIO、DLO、LeGO-LOAM、LIO-SAM(即部分问题解决)
源码下载: https://github.com/engcang/SLAM-application 在运行算法建图的步骤: 1、将源码下载到ros的工作环境中; 2、根据系统配置修改源码: 比如:在ubuntu20.04中运行LeGO-LOAM和LIO-SAM需要将源码CMakeList.txt中修改为c++14; 3、只有发布和接收的话题相同才会出现点云。 一、Point-LIO

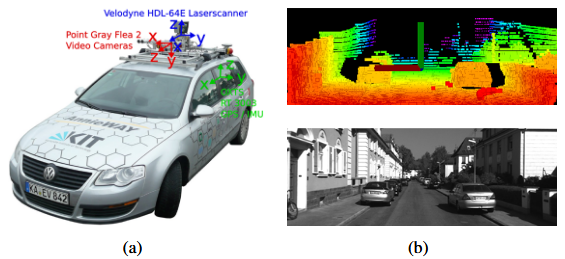
如何使用evo工具评估LeGO-LOAM跑KITTI数据集的结果
如何使用evo工具评估LeGO-LOAM跑KITTI数据集的结果 下载KITTI数据集安装kitti2bag修改LeGO-LOAM代码utility.himageProjection.cpptransformFusion.cpp 安装evo最终结果 下载KITTI数据集 官方链接:KITTI官网 我们只用得到点云数据集和groundtruth,也就是odometry data s