本文主要是介绍VLP-16跑通Lego-LOAM,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
VLP-16跑通Lego-LOAM
- Ubuntu18.04环境下配置及步骤
- VLP-16雷达的使用
- Lego-LOAM的安装
- 配置VLP-16需要的改动:
Ubuntu18.04环境下配置及步骤
在各个总结文章的基础上记录一下各个步骤的细节
VLP-16雷达的使用
配置问题首推博客!Velodyne VLP16激光雷达的使用(非常详细)
内容包括以下:
- 硬件连接、依赖安装;
sudo apt-get install ros-kinetic-velodyne
- 驱动安装(需要在rosdep init成功的情况下进行);
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin_make
source devel/setup.bash
- ROS环境下启动雷达;
roslaunch velodyne_pointcloud VLP16_points.launch
- 输出点云,并录制rosbag;
rosrun rviz rviz -f velodyne
依次点击Add,By topic,点击pointsCloud2添加点云话题即可输出实时点云。
另外运行一个终端,输入以下指令:
rosbag record -0 out /velodyne_points
使用Ctrl + C停止录制后,在当前目录下输出out.bag文件。
如果有win环境下使用的需求,VLP-16安装过程的视频在YouTube上,位置如下: https://www.youtube.com/watch?v=Pa-q5elS_nE。
Lego-LOAM的安装
首推博客:LeGO-LOAM初探:原理,安装和测试
配置VLP-16需要的改动:
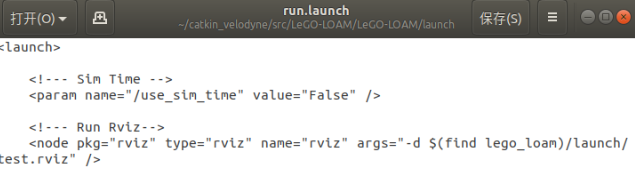
在启动lego-loam时,我们会在终端中输入以下指令来启动launch文件:
roslaunch lego_loam run.launch
然后rosbag play播放数据包来进行测试:
rosbag play XXX.bag --clock --topic /velodyne_points /imu/dataT
但是如果直接启动雷达的话,并不能在rviz中看见点云,这是因为在lego-loam的launch文件中,将/use_sim_time设置为了True,从而在播放rosbag时,通过–clock来使得时间戳一致。在使用真实雷达时,需要将value设置为False(如图),即可输出实时点云。
测试效果如下:

这篇关于VLP-16跑通Lego-LOAM的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






