lego专题

lego-loam算法实现
参考:3、速腾16线激光雷达RS-16 ----- 3D建图算法LeGO-LOAM的使用(Ubuntu18.04 + ROS Melodic) 仿真阿克曼小车+3D激光雷达velodyne并使用lego-LOAM与octomap建图 A-LOAM/LOAM/Lego-LOAM/SC_Lego_LOAM实时构建3d点云地图与2d栅格地图(octomap) lego-loam建立栅格地图并保存
从零入门激光SLAM(十三)——LeGo-LOAM源码超详细解析4
大家好呀,我是一个SLAM方向的在读博士,深知SLAM学习过程一路走来的坎坷,也十分感谢各位大佬的优质文章和源码。随着知识的越来越多,越来越细,我准备整理一个自己的激光SLAM学习笔记专栏,从0带大家快速上手激光SLAM,也方便想入门SLAM的同学和小白学习参考,相信看完会有一定的收获。如有不对的地方欢迎指出,欢迎各位大佬交流讨论,一起进步。博主创建了一个科研互助群****Q:772356582

![运行lego_loam报错[mapOptmization-7] process has died [pid 11653, exit code 127, cmd /home/p/legoloam/dev](https://img-blog.csdnimg.cn/4ed6a35b5dcd41c095ec99c9a9a7ca38.png#pic_center)
运行lego_loam报错[mapOptmization-7] process has died [pid 11653, exit code 127, cmd /home/p/legoloam/dev
运行lego_loam时报错 网上说因为没有把动态链接库的安装路径(例如 /usr/local/lib )放到变量 LD_LIBRARY_PATH 里 可在.bashrc中添加 export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/lib 也可以运行时 export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/us
LeGO-LOAM 几个特有函数的分析(2)
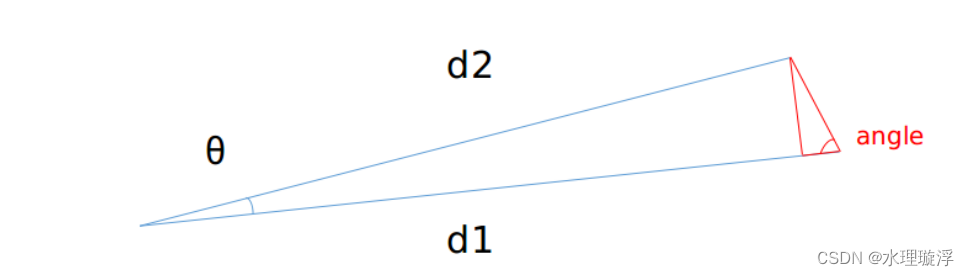
接上回LeGO-LOAM 几个特有函数的分析(1) 二、广度优先遍历 广度优先遍历(Breadth-First Search, BFS)是一种用于遍历或搜索树或图的算法。这种算法从树的根(或图的某一指定节点)开始,然后探索邻近的节点,之后对每一个邻近的节点,它再去探索它们各自相邻的节点,这个过程持续进行直到访问所有可达的节点。 广度优先遍历的主要特点是它按照距离起始点的“层次”来遍历。首先访
乐高(R)教育全球发布全新动手实践式课堂学习方案:LEGO(R) Education SPIKE™ Prime科创套装
LEGO® Education SPIKE™ Prime科创套装于今日亮相,将乐高®积木和数字化学习体验相结合,成为乐高教育K12可延续性STEAM学习方案中的新成员,并提出了如何提高学生STEAM学习信心的新见解。 丹麦比隆--(美国商业资讯)--乐高教育今日推出 LEGO® Education SPIKE™ Prime科创套装,它是乐高教育 STEAM(科学、技术、工程、艺术、数学)动手实践

工程(一)Lego_Loam安装调试及运行
一、LeGO _LOAM安装 # 下载gtsam cd ~git clone https://bitbucket.org/gtborg/gtsam.git #编译 cd ~/gtsammkdir buildcd buildcmake ..make check #可选的,运行单元测试,我没执行这个命令,因为在TX2上编译太慢了,太慢了,太慢了make install #
lego-loam 同步构建2d栅格导航地图
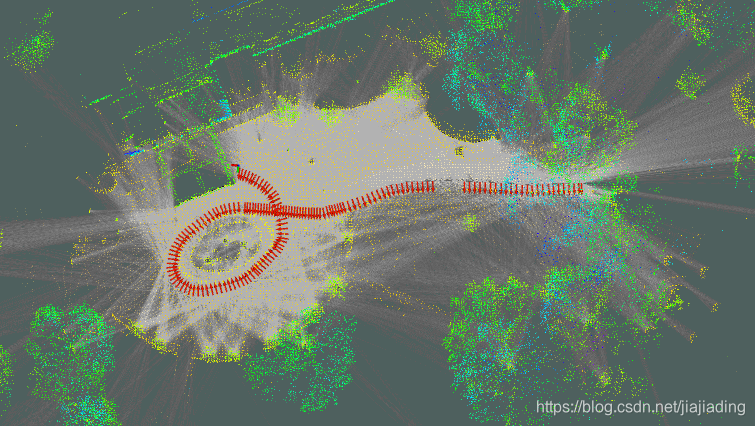
lego-loam 同步构建2d栅格导航地图 3d点云预处理keypose保存根据闭环条件更新2d map构建和2d map总结 基于目前移动机器人的应用可知,目前3d slam存储的主要为点云地图,由于其特征点比2D激光器数据更加丰富,因此用于后期的定位具有更好的抗干扰性和鲁棒性。但是用于导航的基本路径规划功能,目前仍主要依赖于2d栅格地图。 其中16年开源的cartogra

VLP-16跑通Lego-LOAM
VLP-16跑通Lego-LOAM Ubuntu18.04环境下配置及步骤VLP-16雷达的使用Lego-LOAM的安装配置VLP-16需要的改动: Ubuntu18.04环境下配置及步骤 在各个总结文章的基础上记录一下各个步骤的细节 VLP-16雷达的使用 配置问题首推博客!Velodyne VLP16激光雷达的使用(非常详细) 内容包括以下: 硬件连接、依赖安装;
Lego Studio打开solidworks零件/装配体 (sw另存obj文件)
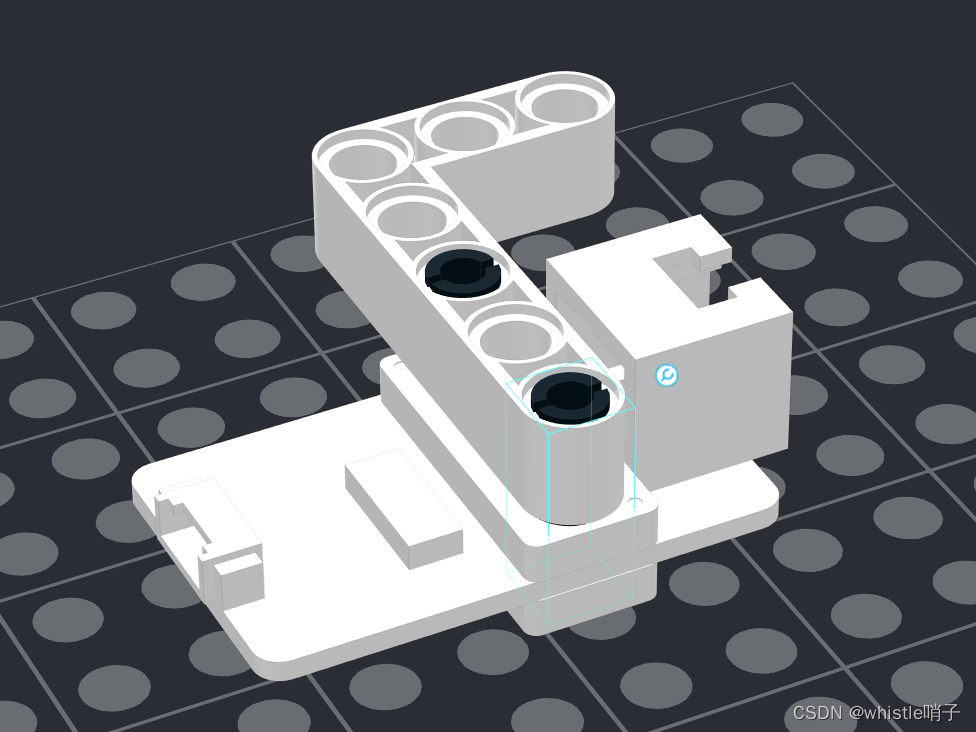
solidworks 2020 Lego studio / part designer 截至2023-10-13🎂最新版 文章目录 操作步骤1) solidworks 开启 `ScanTo3D` 功能2) 零件 / 装配体 保存至stl格式文件3) 以SanTo3D网格文件方式打开stl4) 将打开的stl另存为obj格式5) 用Lego-PartDesigner导入obj6)
在ubuntu20.04下编译并运行Point-LIO、FAST_LIO2、Faster-LIO、DLO、LeGO-LOAM、LIO-SAM(即部分问题解决)
源码下载: https://github.com/engcang/SLAM-application 在运行算法建图的步骤: 1、将源码下载到ros的工作环境中; 2、根据系统配置修改源码: 比如:在ubuntu20.04中运行LeGO-LOAM和LIO-SAM需要将源码CMakeList.txt中修改为c++14; 3、只有发布和接收的话题相同才会出现点云。 一、Point-LIO

如何使用evo工具评估LeGO-LOAM跑KITTI数据集的结果
如何使用evo工具评估LeGO-LOAM跑KITTI数据集的结果 下载KITTI数据集安装kitti2bag修改LeGO-LOAM代码utility.himageProjection.cpptransformFusion.cpp 安装evo最终结果 下载KITTI数据集 官方链接:KITTI官网 我们只用得到点云数据集和groundtruth,也就是odometry data s