vlp专题

【VLP(Visual-Linguistic Pretraining)模型相关基本知识】
VLP(Visual-Linguistic Pretraining)模型相关基本知识 VLP(Visual-Linguistic Pretraining)模型是一种用于视觉与语言联合训练的模型。它旨在通过同时学习视觉和语言任务,从大规模的视觉和语言数据中提取丰富的视觉和语义特征。 VLP模型的发展方向主要包括以下几个方面: 提高模型的视觉理解能力:通过引入更强大的视觉特征提取器、改进的注意力机制
VLP: A Survey on Vision-Language Pre-training
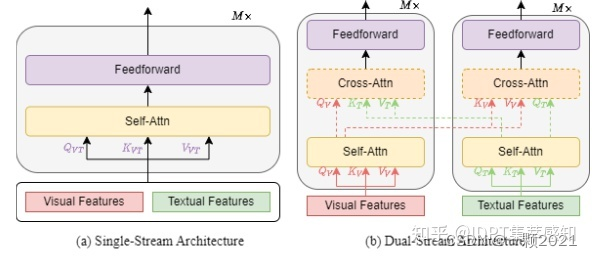
前言 在计算机视觉与自然语言处理预训练模型层出不穷的今天,多模态预训练模型也悄然浮出水面。本篇综述是第一篇关于视觉-语言预训练(Vision-Language Pretraining)的综述,介绍了VLP的最新进展和新领域,包括了图像-文本和视频-文本的预训练。整篇综述从以下5个方面对视觉-语言预训练进行了详细的阐释: 特征提取 模型架构 预训练目标 预训练数据集 下游任务 VLP主要通过对大规

VLP: A Survey on Vision-Language Pre-training 论文总结
VLP: A Survey on Vision-Language Pre-training VLP:视觉语言预训练研究综述 论文地址: https://arxiv.org/pdf/2202.09061.pdf 摘要: 在过去几年中,训练前模型的出现将计算机视觉(CV)和自然语言处理(NLP)等单峰领域带入了一个新时代。大量工作表明,它们有利于下游单峰任务,避免从头开始训练新模型。那么,这种预
中科院提出:视觉-语言预训练(VLP)综述,了解多模态最新进展!
点击下方卡片,关注“CVer”公众号 AI/CV重磅干货,第一时间送达 作者:Feilong Chen等 转载自:机器之心 | 编辑:陈萍 一文了解视觉 - 语言预训练最新进展和新领域。 让机器做出与人类相似的反应一直是 AI 研究不懈追求的目标。为了让机器具有感知和思考的能力,研究人员进行了一系列相关研究,如人脸识别、阅读理解和人机对话,通过这些任务训练和评估机器在特定方面的智能。一般

VLP、多模态图文任务(1)
图文检索、视觉问答(VQA)和图像描述和可以说是文献中最广泛研究的三个图文任务。它们要求AI系统理解输入图像和文本内容。受到语言模型预训练的巨大成功的启发,再加上NLP和CV社区中使用的体系结构的统一,对于开发用于图文任务的VLP方法产生了激增的研究兴趣。具体而言,将大量的图像-标题对输入到同时处理图像和文本的模型中进行预训练,以获得编码丰富的多模态知识并有助于下游任务。 多
VLP、多模态图文任务(3)高级主题
随着以图像和文本为基础的视觉语言预训练研究日益增长,许多其他有趣的研究主题也应运而生。以下,我们对每个单独的主题进行简要讨论,例如大模型、小样本学习、统一建模、鲁棒性评估等。 在每个主题中,由于空间有限,我们只列举了一些代表性的作品。此外,如果某些模型在一个主题中已经展示过,将不会在另一个主题中再次展示,以避免重复。例如,Flamingo在Few-Shot

Ubuntu18.04-ROS melodic -VLP_16激光雷达使用
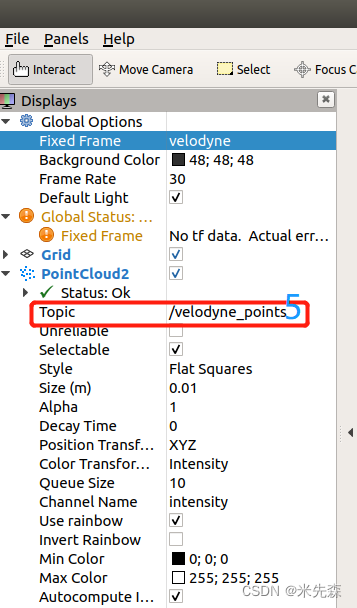
OS and Version: Ubuntu 18.04 ROS Version: Melodic lidar: Velodyne_16 前期准备 1.激光雷达上电 2.将激光雷达连接到工控机的网口 3.禁用无线连接 一、配置工控机网口 1.设置有线网口中的IP4 2.设置ENP网络中的IP4设置为手动 3.设置为IP地址192.168.1.77,子网掩码255.255.255.0,网关1
VLP-16激光雷达调试使用、点云数据格式转化
一、接线 VLP-16只有两条接线,一个是电源线,一个是网口线,先接网口线,再接电源线(电源电压是9-18V)。为保证安全起见,遵循传感器后接电源的原则。接通电源后会有呼呼的响声,属于正常现象。 二、网络设置(以win11为例,其余版本设置的地方可能有些许不同) 1、选择当前的网络连接(无论有线还是无线,都需要设置网络的属性) 2、选择“使用下面的IP地址”:IP地址:

单、双激光雷达启动与双激光雷达的外参标定(VLP-16)
本文旨在帮助读者迅速完成双Velodyne16激光雷达的启动与外参标定!所用到的标定方法是NDT扫描匹配算法。废话不多说,直接开始! 一、单激光雷达的启动 #安装velodyne的ros依赖sudo apt-get install ros-melodic-velodyne#进入工作空间克隆velodyne包git clone https://github.com/ros-drivers/v

VLP-16激光雷达虚拟系统ubturn系统下ros环境读取数据
最近在研究激光雷达,入手一台VLP-16激光雷达,记录下调试过程,把3d点云数据直观读取出来。 设备:win10电脑 刚开始搜集资料发现威力登VLP激光雷达只能在两种环境下显示点云数据 1.在win系统下,用 veloview进行数据显示 2.在Ubuntu系统下,安装ros进行数据显示。 安装包 ubuntu-16.04.1-desktop-amd64链接:https://

Velodyne VLP-32C/VLP-16在ROS下的数据获取、显示及录制
“不要急着让生活给予所有的答案,有时我们需要耐心的等待。相信过程,坦然前行,不负生活,生活也必不负你。” 原来人都会离开…… 愿天堂不再受罪· 愿好人一生平安~ 激光雷达可能是短时间内无人驾驶当中最受追捧、不可缺少的传感器了,当然作为Lidar领域的大哥Velodyne,一共有一下几种:单线、4线、16线、32线、64线等,接下来就说一说如何在ROS下初级使用该传感器:
Ubuntu 20.04 调试VLP-16
velodyne wiki 官网: velodyne - ROS Wiki Ubuntu 20.04 ROS noetic 一、安装ROS依赖 sudo apt install ros-noetic-velodyne 注:不用Ubuntu版本对应的ros-noetic-velodyne不一样。 二、安装VLP驱动 mkdir -p catkin_velodyne/src

VLP激光雷达Veloview使用教程
上一篇文章写道在win系统下不太方便使用Veloview软件,最近又翻了一遍VLP-16激光雷达使用手册才发现 原来是这么简单 方便! 给大家提个建议,一定要好好看官方提供的使用建议!对新手来说非常重要! 前期准备 先附上安装包 官方地址VeloView | ParaView 点击所需的版本 下载安装即可。(版本间的区别介绍在官网上已经说明),安装完成是这样的恶页面,版本为4.

VLP-16跑通Lego-LOAM
VLP-16跑通Lego-LOAM Ubuntu18.04环境下配置及步骤VLP-16雷达的使用Lego-LOAM的安装配置VLP-16需要的改动: Ubuntu18.04环境下配置及步骤 在各个总结文章的基础上记录一下各个步骤的细节 VLP-16雷达的使用 配置问题首推博客!Velodyne VLP16激光雷达的使用(非常详细) 内容包括以下: 硬件连接、依赖安装;

VLP:《视觉-语言预训练》综述
中科院自动化所最新《视觉-语言预训练》综述 转载来自公众号:机器学习算法与自然语言处理 论文标题: VLP: A Survey on Vision-Language Pre-training 论文链接:https://www.zhuanzhi.ai/paper/426bf1325e3132ff5a4aa1cc90c27f3c 01摘要 在过去几年中,预训练模型的出现将计算机视觉(C

使用velodyne VLP-16激光雷达连接工控机(linux系统)出现无法连接的问题
VLP-16激光雷达通过以太网与工控机通讯,网线连接时,一直在获取,最终无法连接。 如图所示,信号一直在获取,无法成功。 已经配置有线网络,打开/etc/network/interfaces: auto eth0 iface eth0 inet static address 192.168.1.77 netmask 255.25

【cartographer】机器人使用vlp-16多线雷达建图参数配置
目录 1、lua文件配置option部分参数修改TRAJECTORY_BUILDER_2D部分参数修改POSE_GRAPH部分参数修改 2、launch文件需要修改的参数 环境: ubuntu 20.04 + ros1 noetic gazebo 11 机器人有urdf,tf树最上层为base_link,无里程计和imu 直接使用vlp-16点云数据建cartogr