本文主要是介绍VLP-16激光雷达调试使用、点云数据格式转化,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、接线
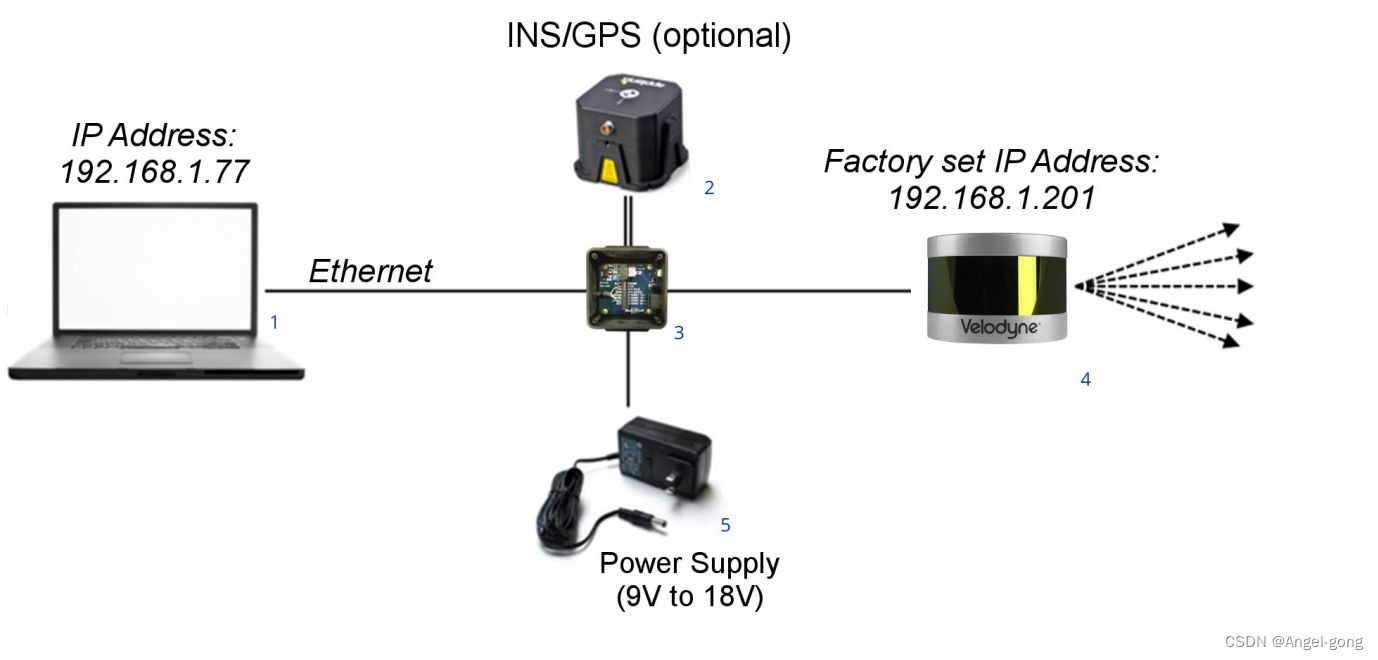
VLP-16只有两条接线,一个是电源线,一个是网口线,先接网口线,再接电源线(电源电压是9-18V)。为保证安全起见,遵循传感器后接电源的原则。接通电源后会有呼呼的响声,属于正常现象。

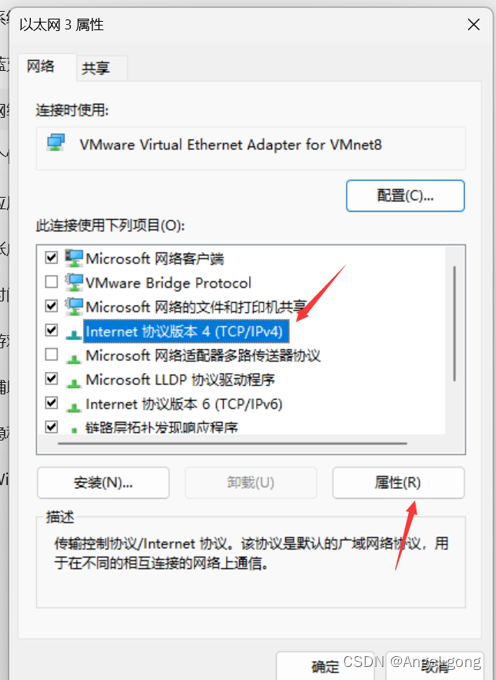
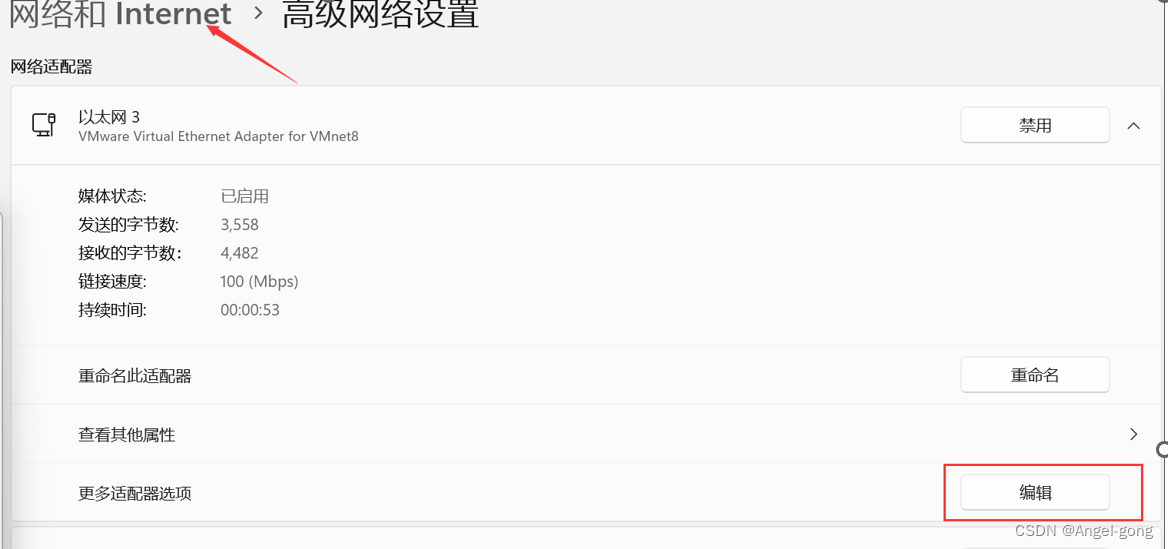
二、网络设置(以win11为例,其余版本设置的地方可能有些许不同)
1、选择当前的网络连接(无论有线还是无线,都需要设置网络的属性)
2、选择“使用下面的IP地址”:IP地址:192.168.1.xxx,这里范围是0-255,除了0,255和201。掩码一般点击即可自动填写。

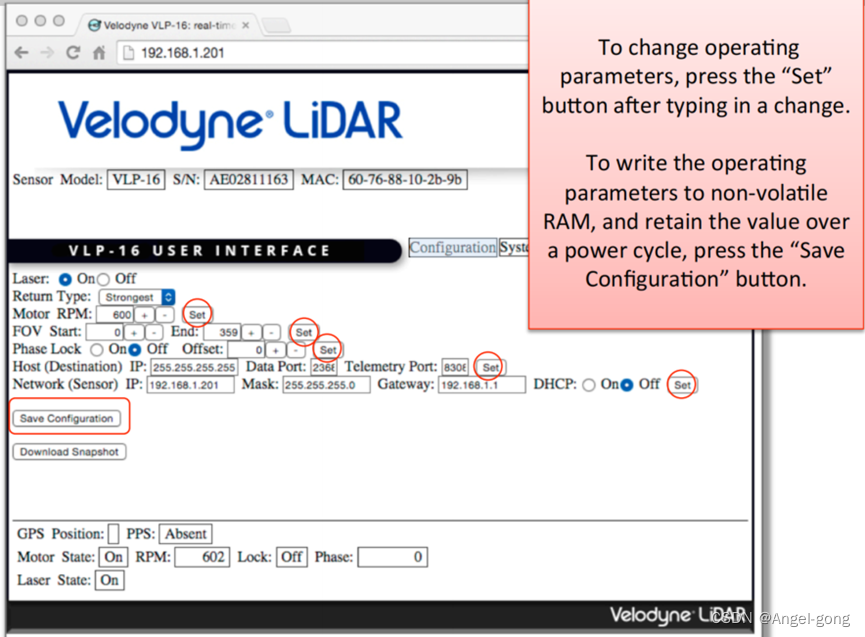
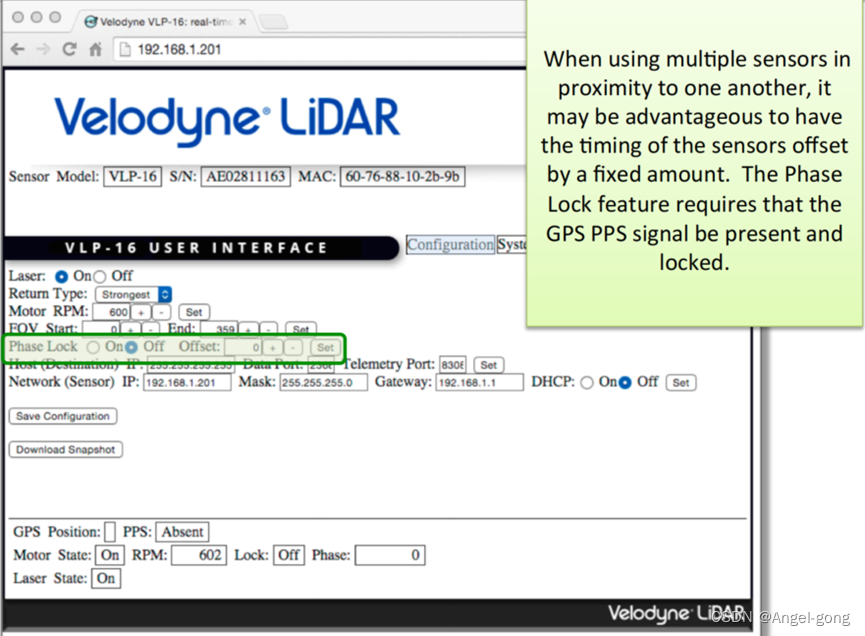
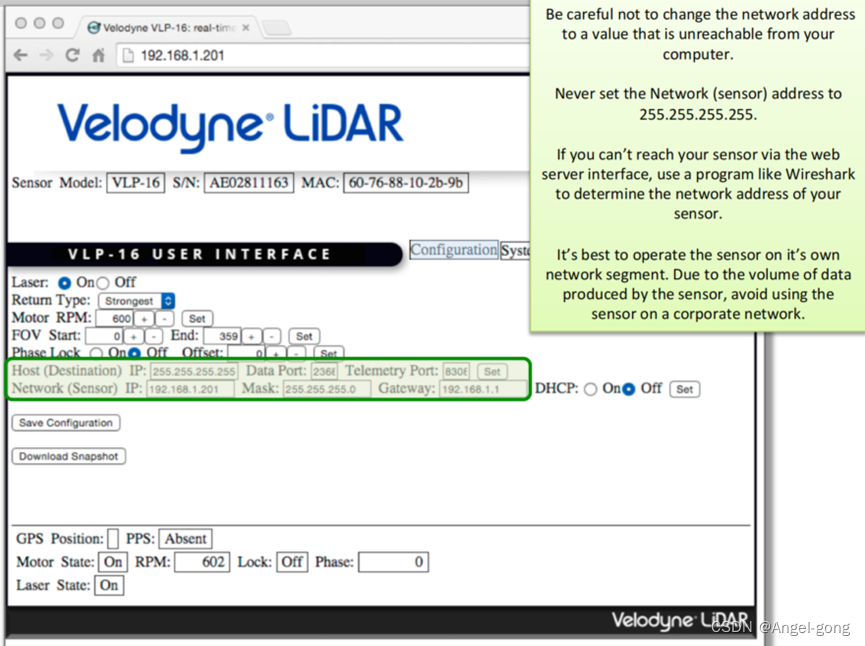
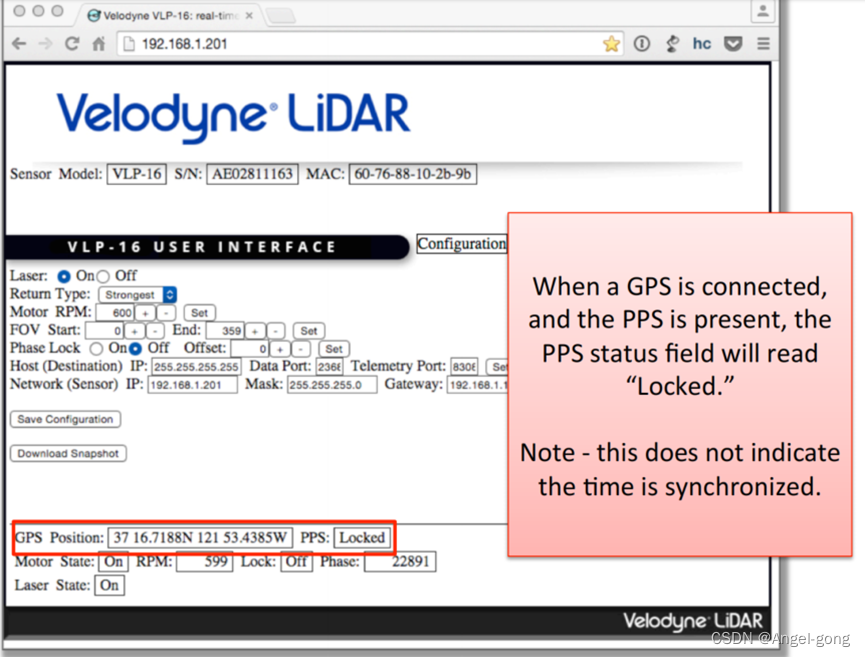
三、完成之后,在电脑的浏览器中敲入网址:http://192.168.1.201,即可打开官网的信息,证明通信成功
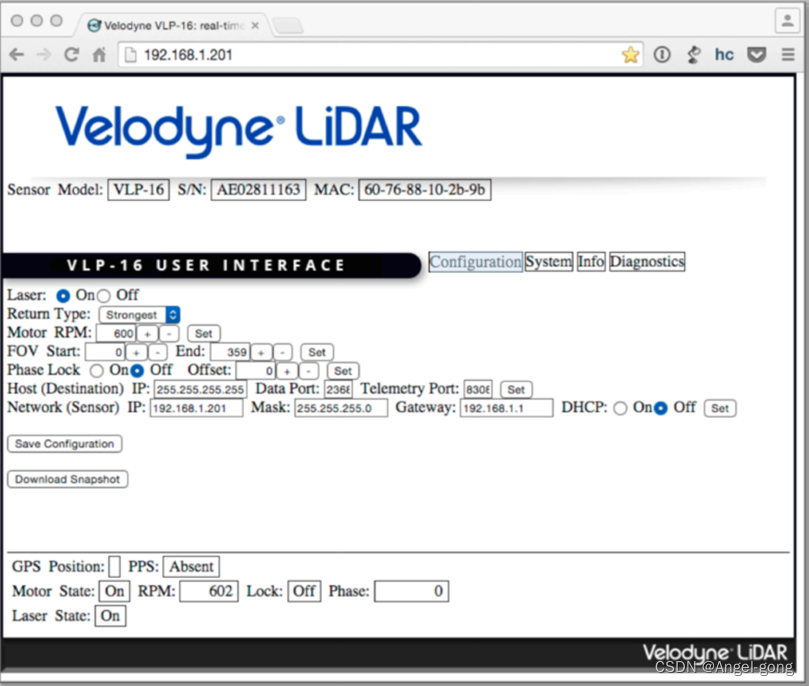
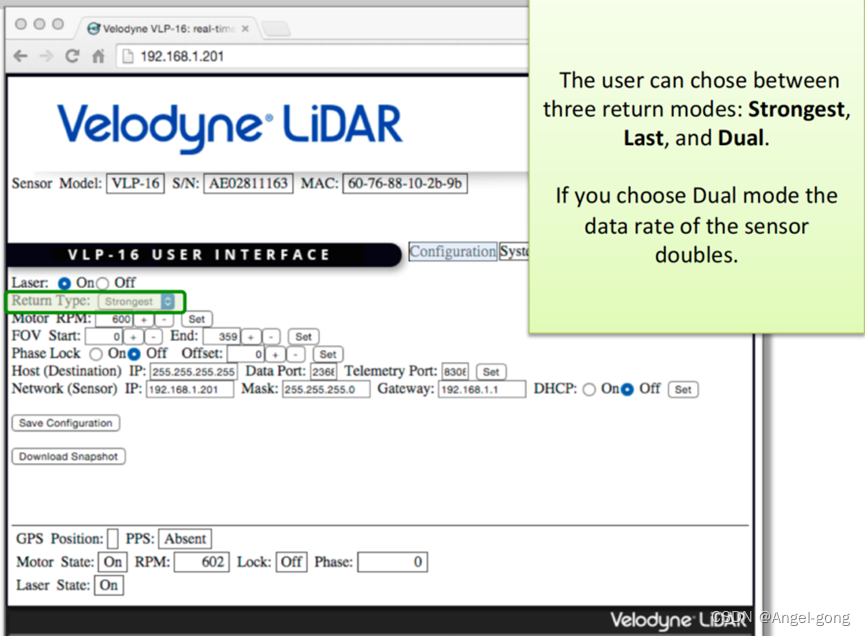
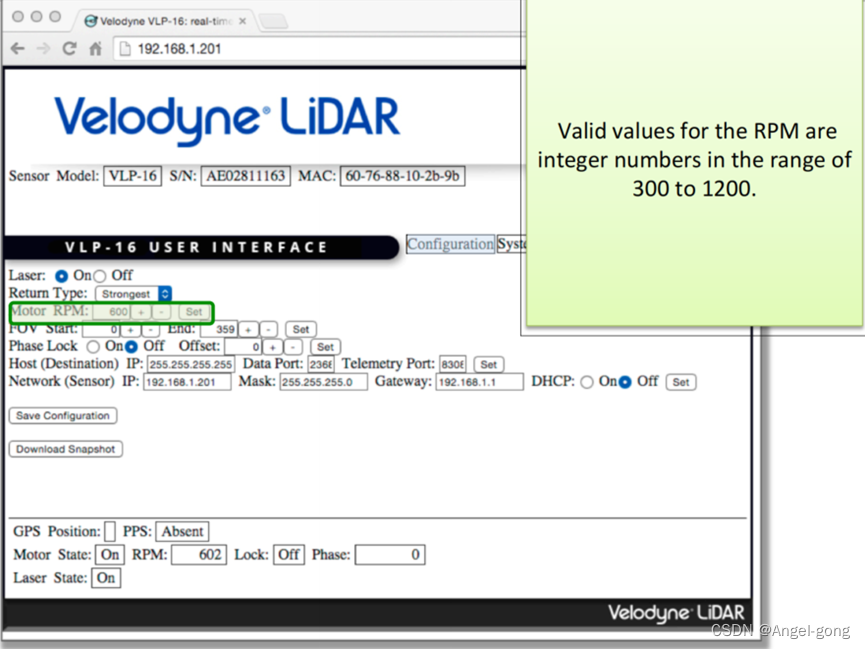
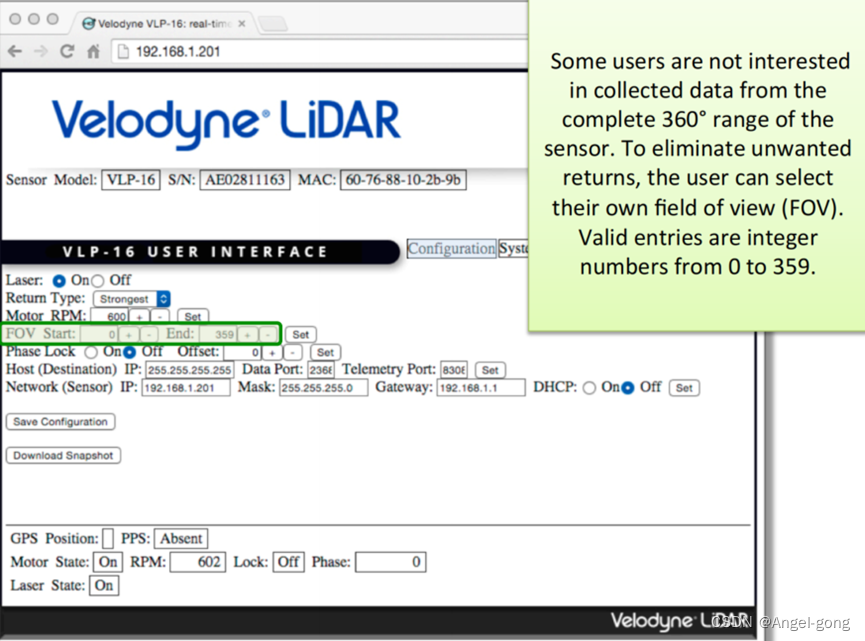
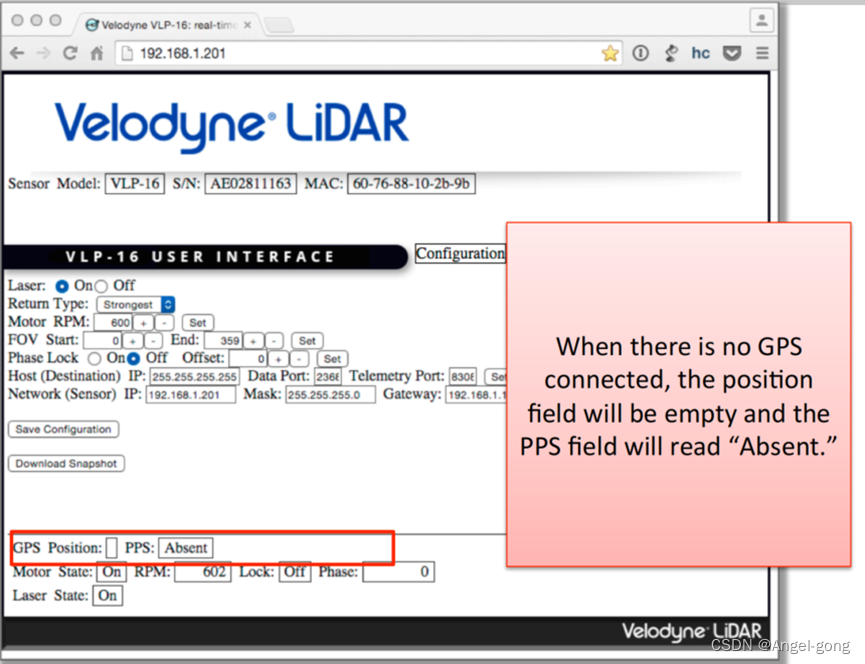
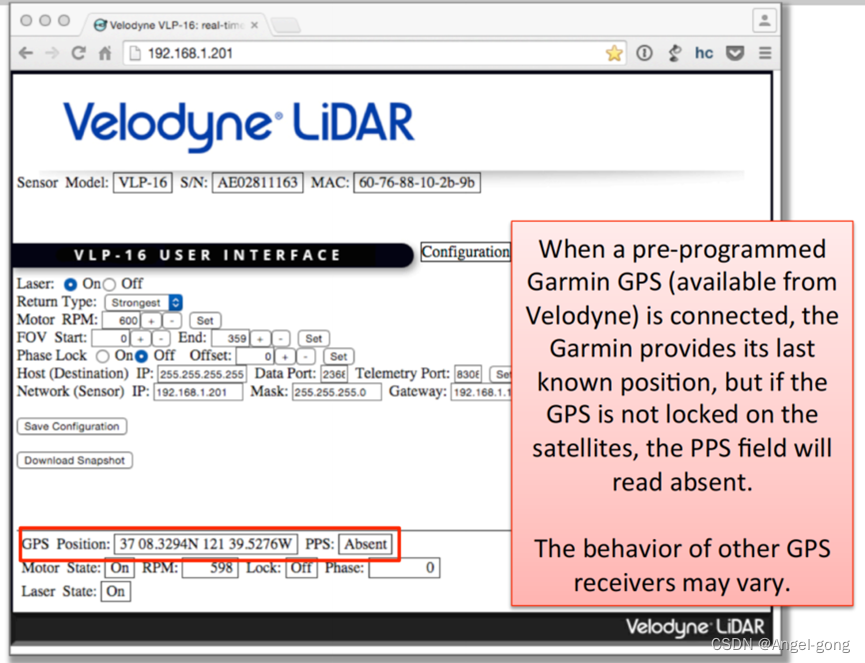
各参数如下:(可忽略)
确保某些开关要打开,一般情况下默认都是打开的
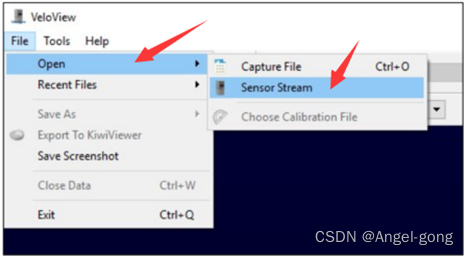
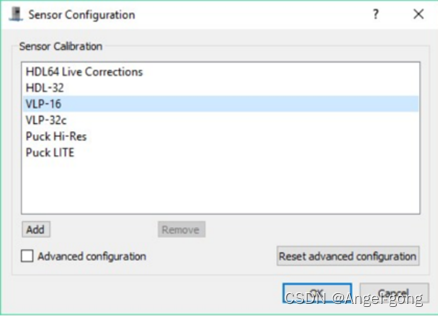
四、打开Veloview软件可视化当前的点云数据
注意:这里需要注意和激光雷达对应的软件版本问题,之前我使用的Veloview软件版本是4.x版本,但是激光雷达对应的版本为3.5,采集数据的时候没有问题,但是将pcap数据转化为csv数据的时候,格式会出现问题,导致无法在Cloudcompare软件中无法可视化真实的点云数据。
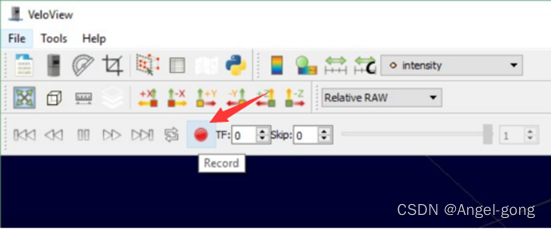
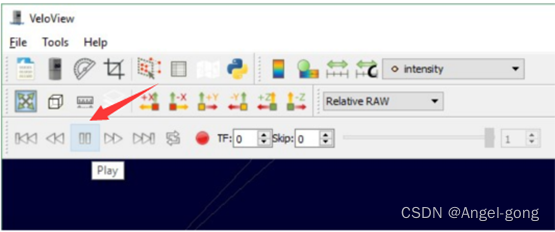
如果想录制当前的点云数据,就需要点击红色按钮,然后选择保存的文件地址(文件一般都是按照时间戳保存的),再次按下红色按钮即为停止录制。期间如果点击play即可重新播放/暂停的意思
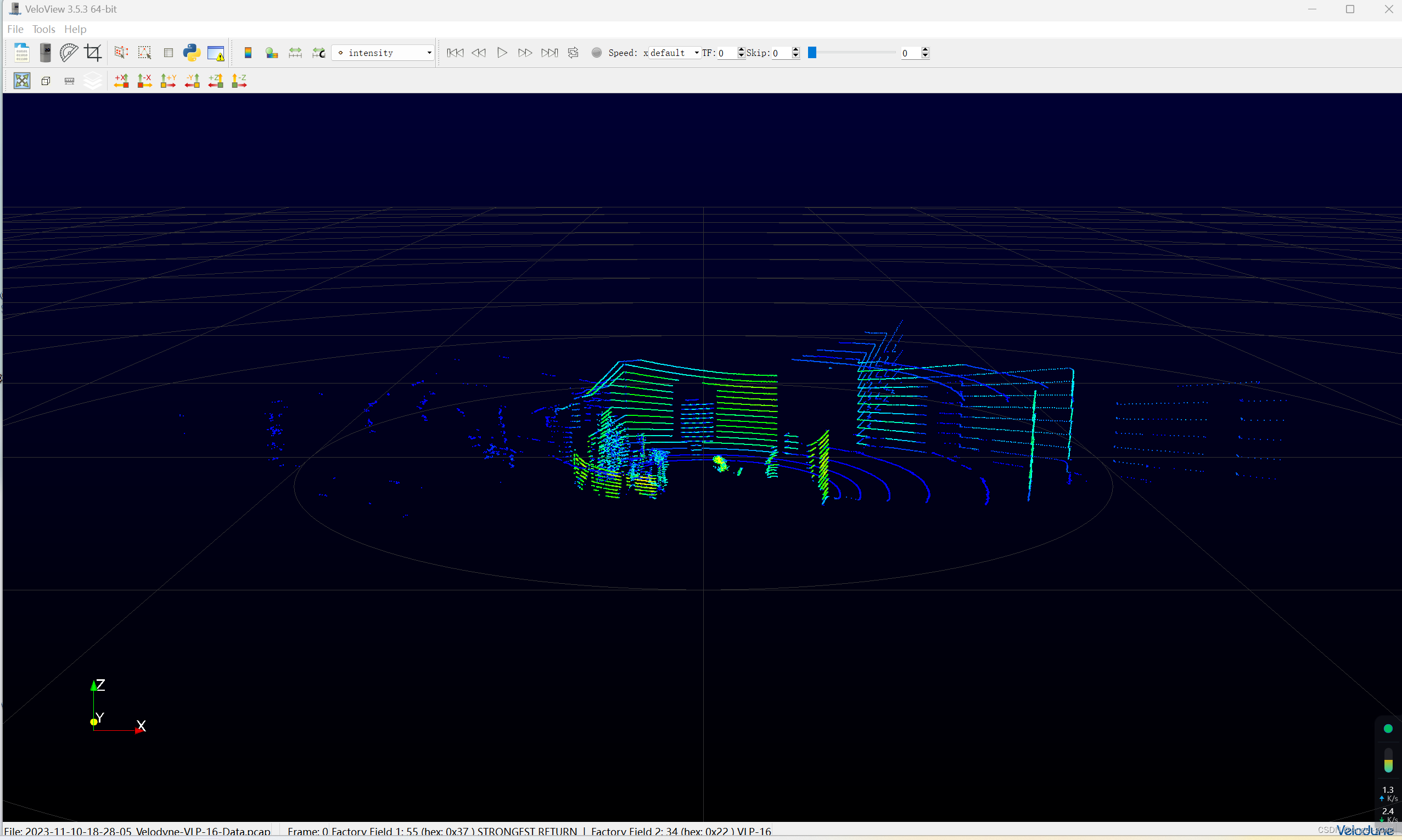
采集的点云数据如下图所示:
默认情况下,颜色代表反射强度;保存的文件格式为.pcap,为原始点云的格式
五、点云数据格式转化
采集的原始点云数据格式为.pcap格式,无法利用起来,一般情况下利用起来的点云数据格式为.pcd或者.ply,所以这里介绍一个比较简单的点云数据转化方法。
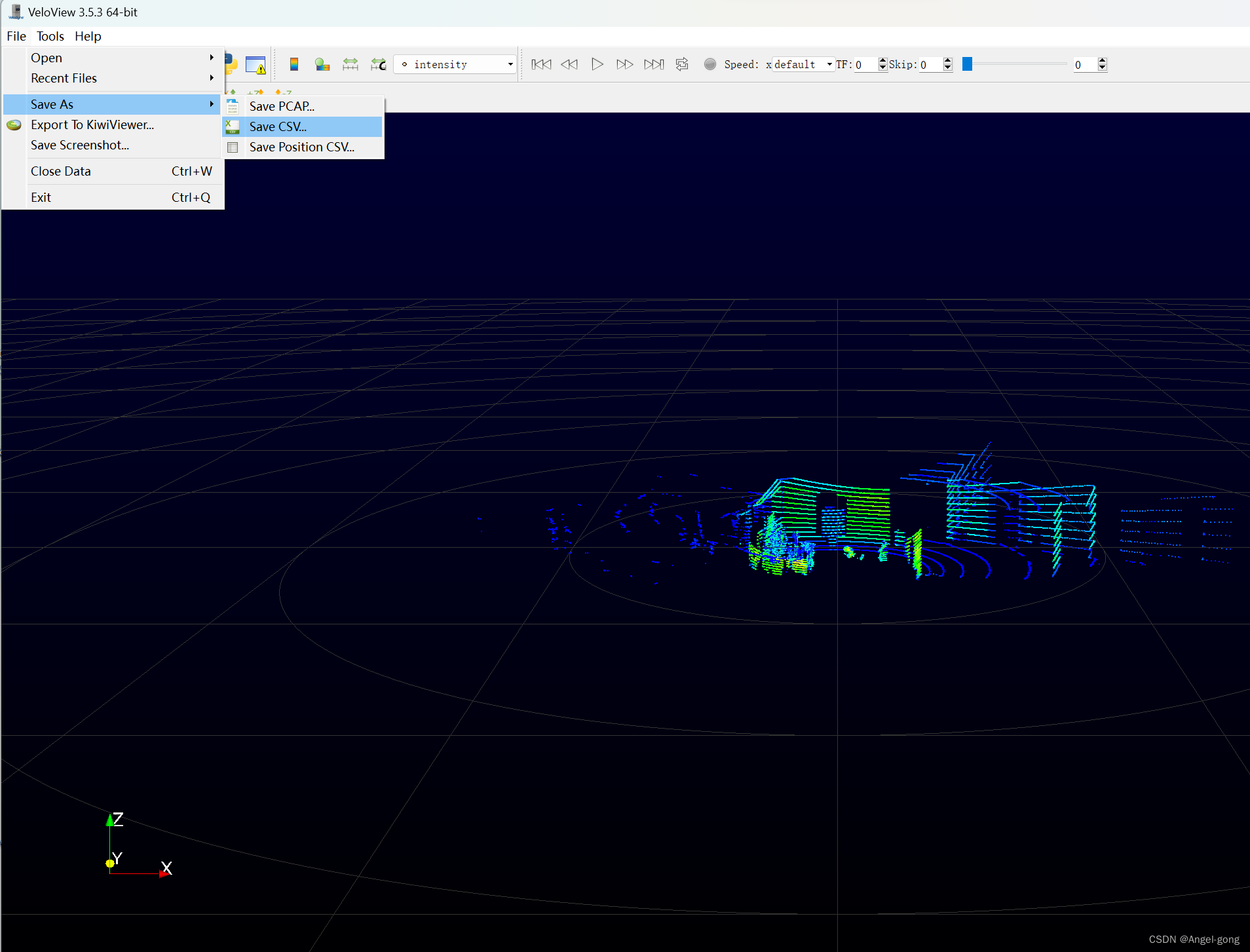
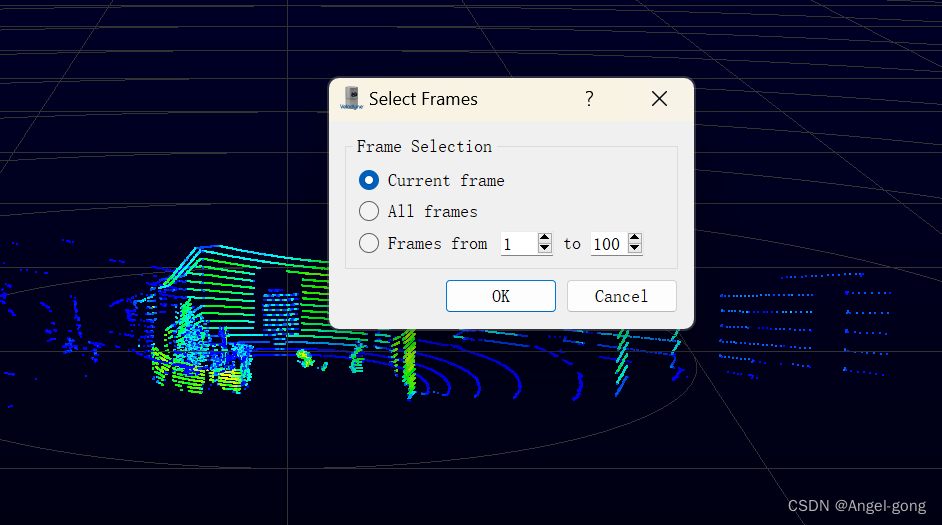
(1)在Veloview软件中,将采集的数据另存为.csv文件,可以只保存当前帧数据,也可以保存全部帧数据,也可以自定义选择m-n帧的数据进行保存。保存到的数据以时间戳的形式保存

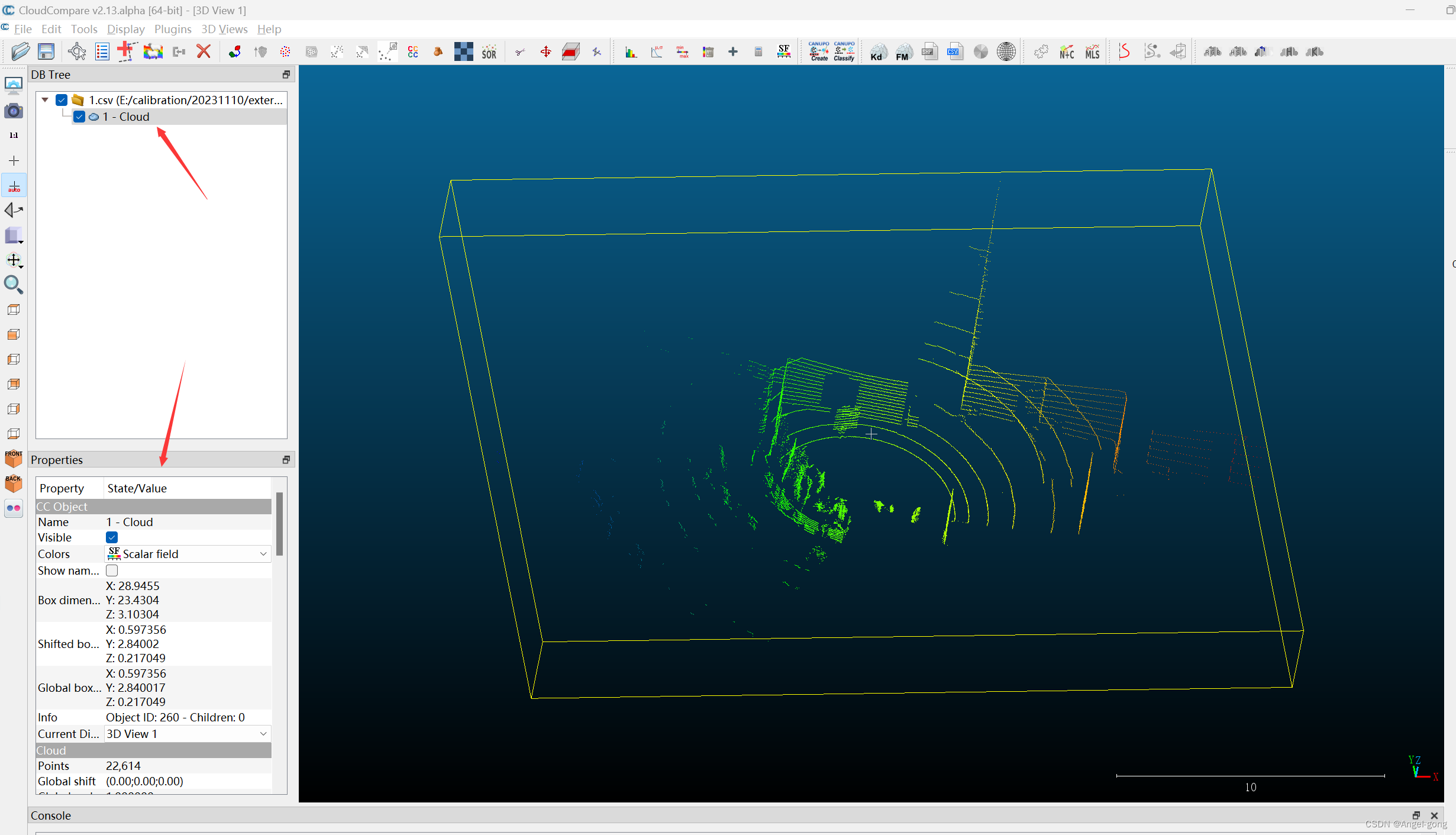
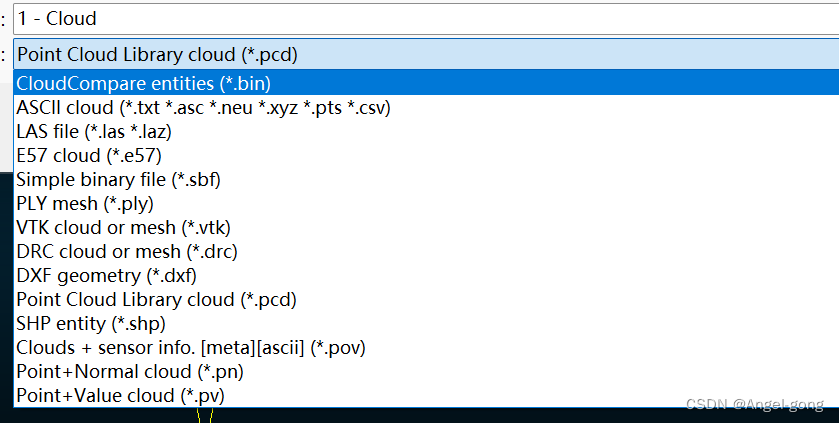
(2)使用Cloudcompare软件打开将转化的.csv文件,点击一下输入的数据,下面会出现属性的页面,这时候可以点击“文件---保存”,可以保存为相应的.pcd或者.ply文件
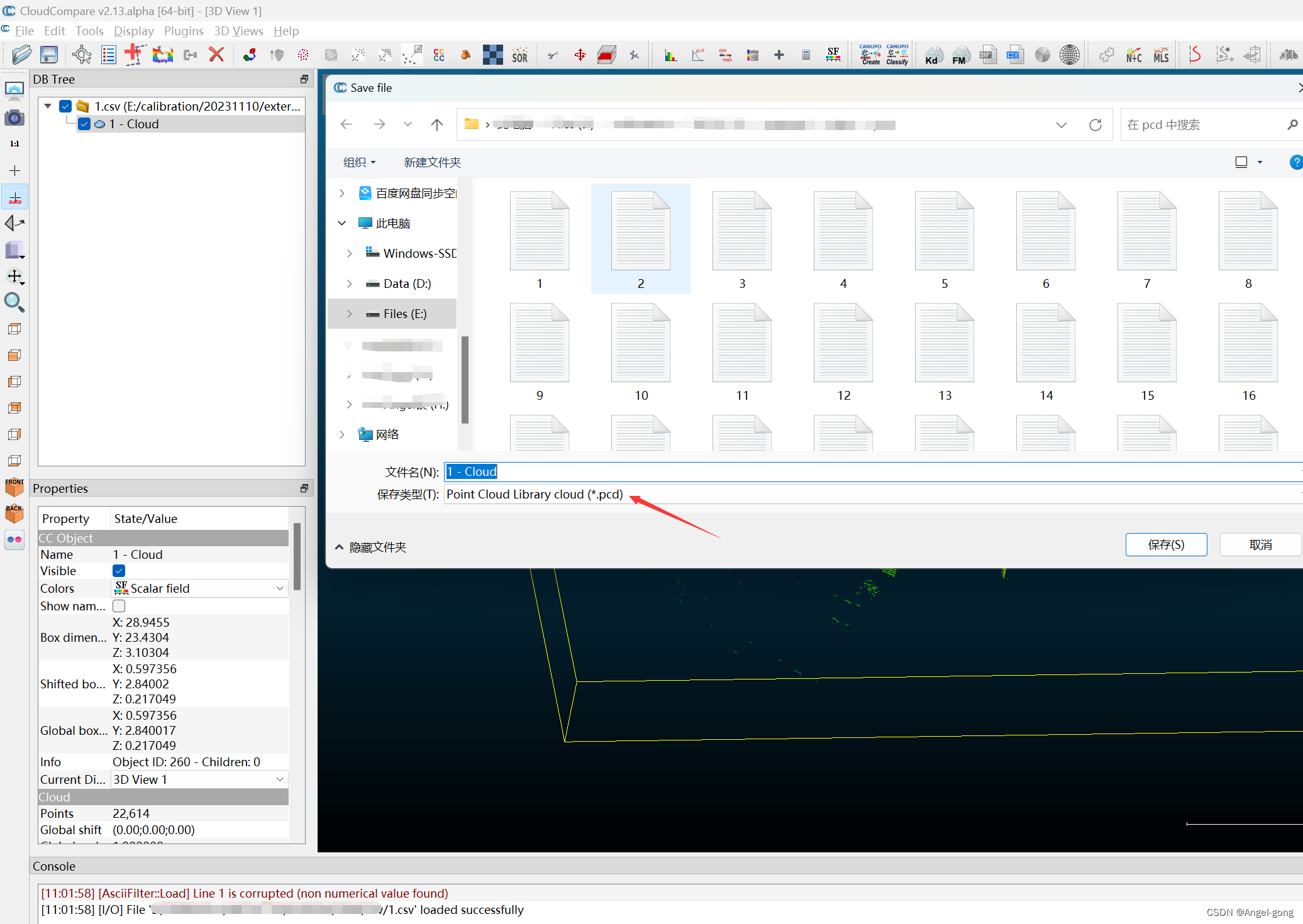
当然,这个软件功能比较齐全,还可以转化为其他的数据格式
通过以上步骤,就可以转化为可用的PCD点云数据格式了,之后就可以利用转化的点云数据做其他的研究了!!!
如还有不清,请查看Velodyne 16激光雷达官方用户手册
这篇关于VLP-16激光雷达调试使用、点云数据格式转化的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





