本文主要是介绍Ubuntu 20.04 调试VLP-16,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
velodyne wiki 官网: velodyne - ROS Wiki
Ubuntu 20.04
ROS noetic
一、安装ROS依赖
sudo apt install ros-noetic-velodyne注:不用Ubuntu版本对应的ros-noetic-velodyne不一样。
二、安装VLP驱动
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git

cd ..
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
catkin_make
source devel/setup.bash

三、网络设置
第一步:激光雷达连接电源,网线连接激光雷达和电脑
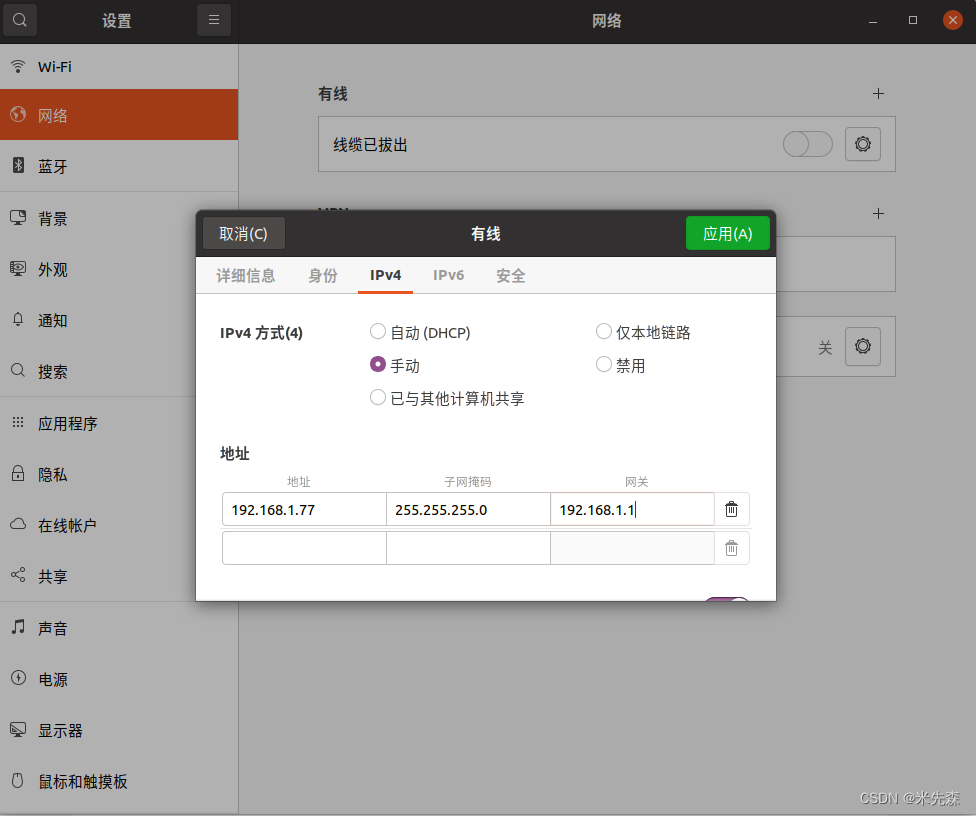
第二步:设置有线网络
1.设置有线网口中的IP4
2.设置ENP网络中的IP4设置为手动
3.设置为IP地址192.168.1.77,子网掩码255.255.255.0,网关192.168.1.1。
4.点击保存,然后关闭网口,再重新打开网口。
连接到雷达网络

第三步:打开浏览器,输入192.168.1.201
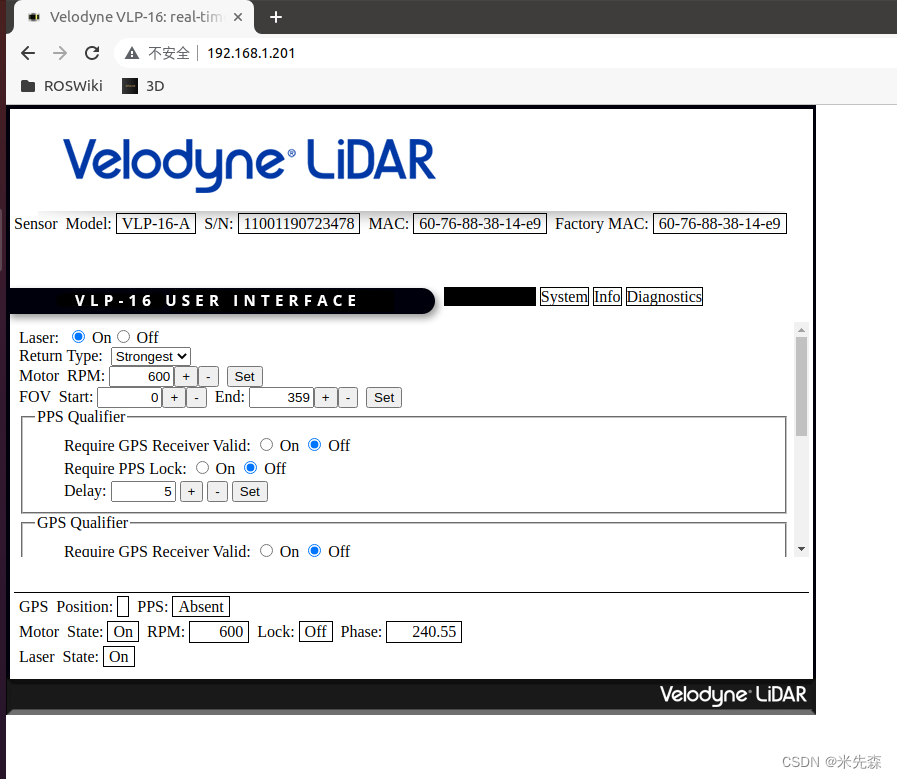
四、测试
// 终端
roslaunch velodyne_pointcloud VLP16_points.launch// 新开终端
rviz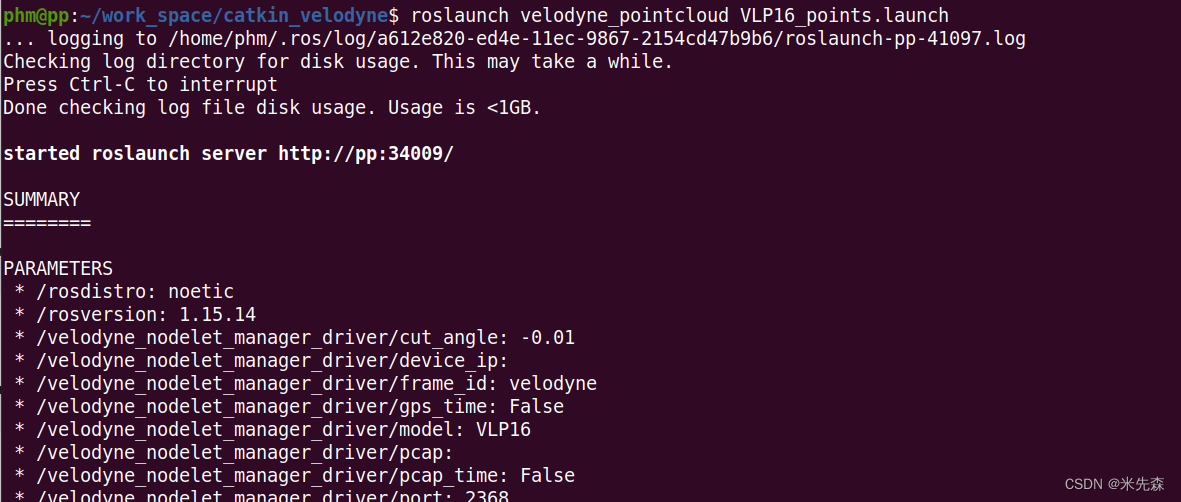

附加::Rviz
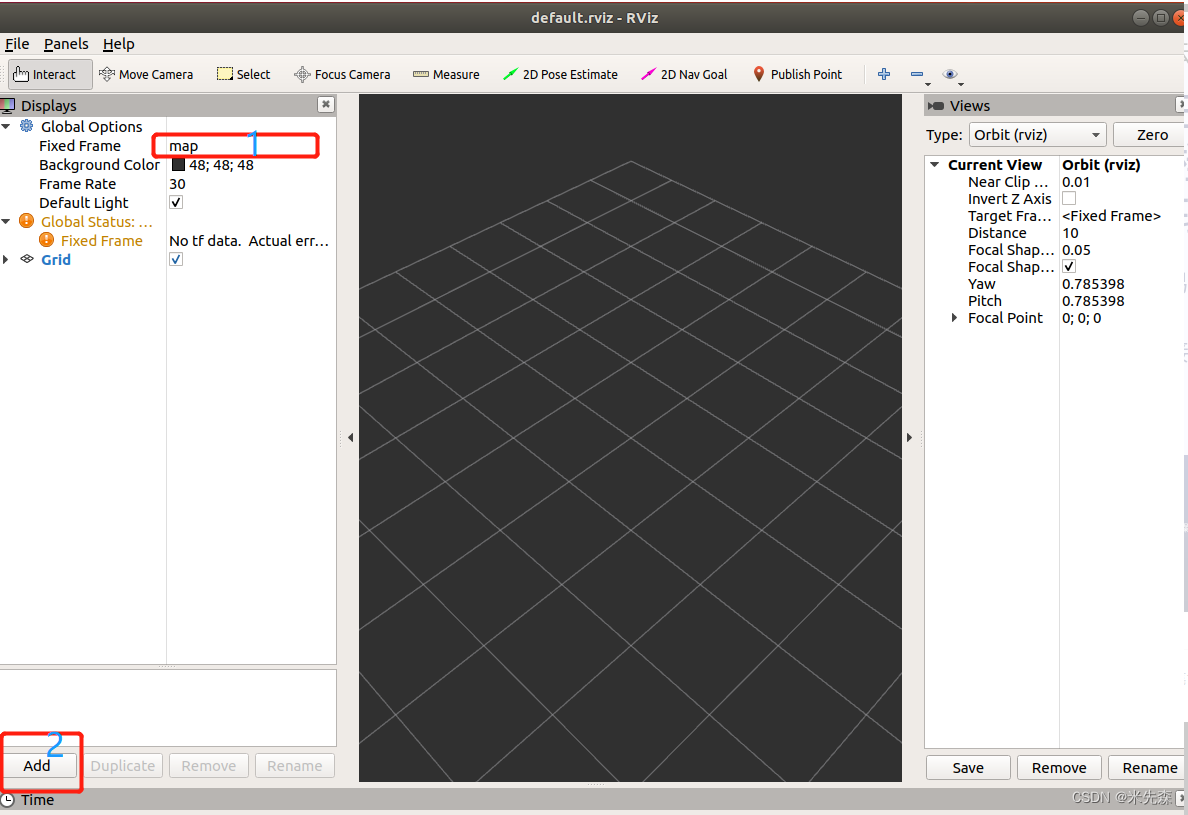
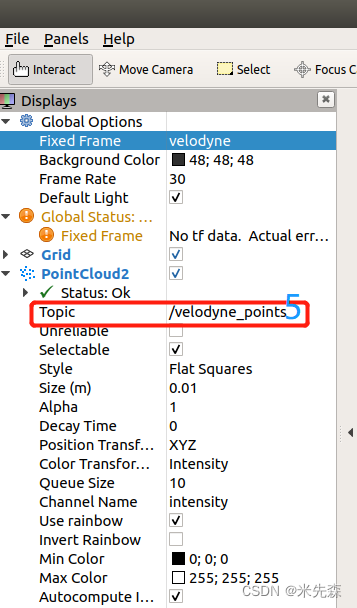
1map 地方 改为 velodyne
2 add PointCloud2
加进去之后修改 PointCloud2的topic
参考:
velodyne vlp-16 使用教程_菜鸟lr的博客-CSDN博客_velodyne16使用
VLP-16与ubuntu连接方法_鲍汁捞饭的博客-CSDN博客
这篇关于Ubuntu 20.04 调试VLP-16的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








