跑通专题

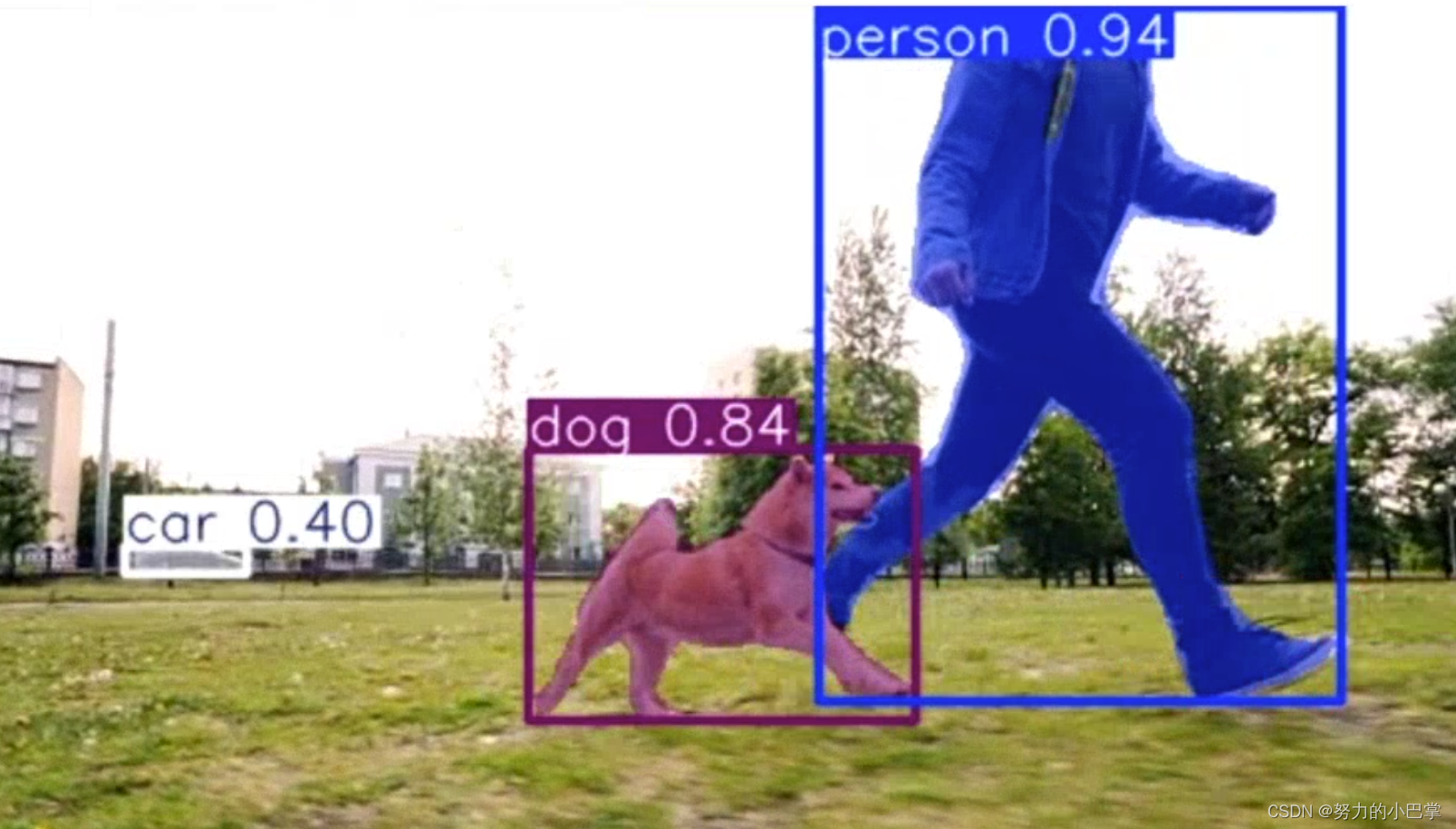
Datawhale 夏令营 Task1:跑通YOLO方案baseline!
YOLO数据处理 一.YOLO数据格式 YOLO数据格式为 <class> <x_center> <y_center> <width> <height> 二.制作数据集 1.新建文件夹及配置文件 if not os.path.exists('yolo-dataset/'):os.mkdir('yolo-dataset/')if not os.path.exists('yolo-data
【yolov8语义分割】跑通:下载yolov8+预测图片+预测视频
1、下载yolov8到autodl上 git clone https://github.com/ultralytics/ultralytics 下载到Yolov8文件夹下面 另外:现在yolov8支持像包一样导入,pip install就可以 2、yolov8 语义分割文档 看官方文档:主页 -Ultralytics YOLO 文档 还能切换成中文版本,真友好。 看以下y
python-win10跑通chattts笔记(亲测可跑)0.8.010
python-win10跑通chattts笔记-亲测可跑 背景项目地址安装过程使用技巧参考链接 背景 克隆了项目中的代码,在无conda环境下使用pip安装了依赖,最后报错cl: 命令行 error D8021 :无效的数值参数“/Wno-register” error: command 'C:\,最后通过使用conda解决了,以此记录下 项目地址 https://gitc

ubantu20.04 跑通ros2版的orbslam2
我的历程 先编译的非ros版的robslam2(非常详细) ubuntu20.04配置并编译ORB-SLAM2_ubuntu20.04安装orb-lslam2-CSDN博客 然后装ros2(非常详细) 详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)_ubuntu安装ros-CSDN博客 遇到的问题 一、usb_cam-test.launch的内容git下
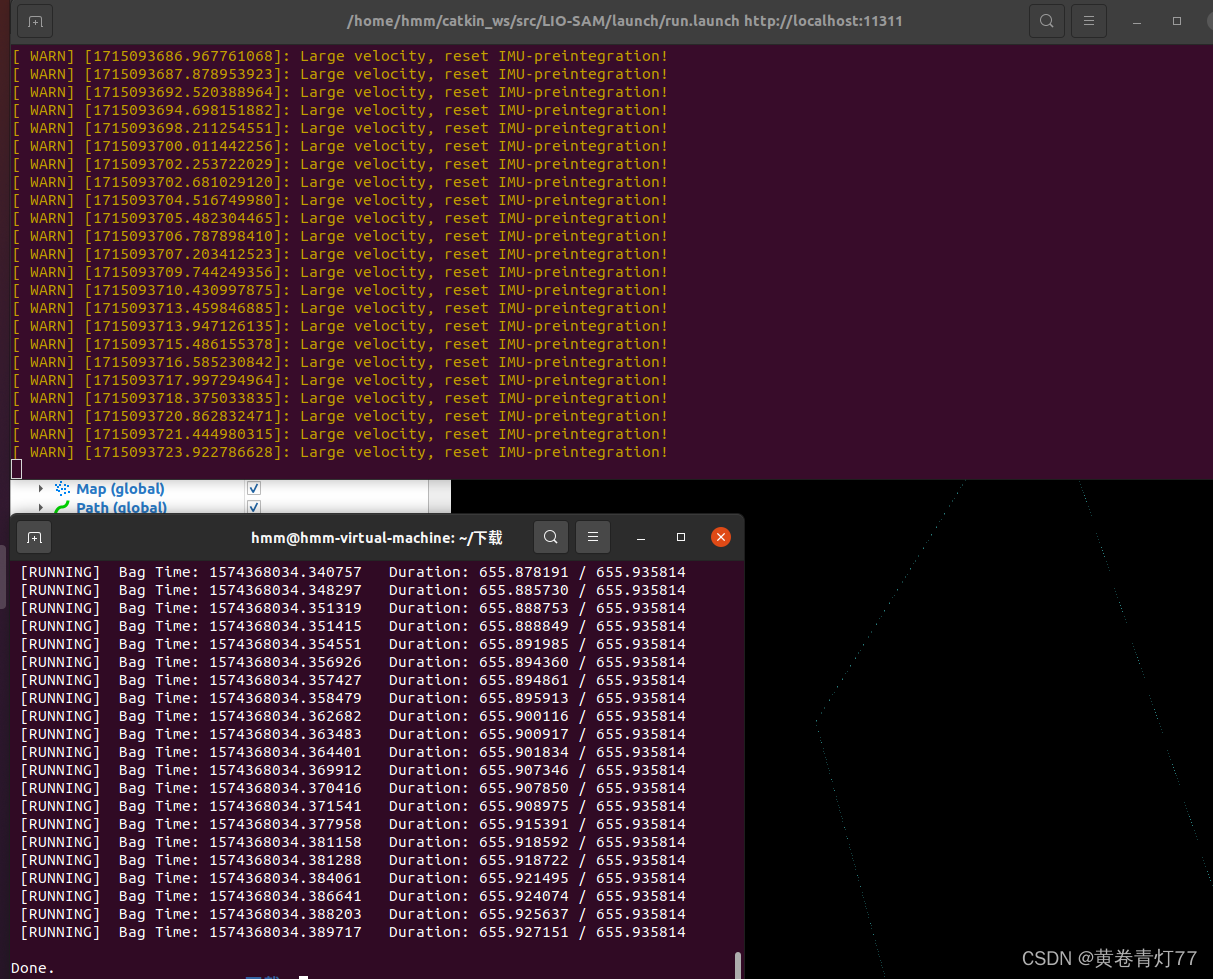
20240507 ubuntu20.04+ros noetic 跑通lioslam
任务:跑通lioslam 主要参考博客 IMU+激光雷达融合使用LIO-SAM建图学习笔记——详细、长文、多图、全流程_ubuntu_AIDE回归线-GitCode 开源社区 (csdn.net) 1.不要用这一句 wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip

flutter跑通腾讯云直播Demo
运行示例 前提条件 要求java jdk 11版本 并且配置到了环境变量 重要 要求flutter 版本 2.8.0 并且配置到了环境变量 重要 要求dart-sdk版本2.15 并且配置到了环境变量 重要 您已 注册腾讯云 账号,并完成 实名认证。 申请 SDKAPPID 和 SECRETKEY 登录实时音视频控制台,选择【开发辅助】>【快速
YOLOv9最新改进系列:YOLOv9云服务器环境搭建-包百分百跑通!
YOLOv9最新改进系列:YOLOv9最新改进系列:YOLOv9云服务器环境搭建-包百分百跑通! YOLOv9原文链接戳这里,原文全文翻译请关注B站Ai学术叫叫首er B站全文戳这里! v8 v9 详细的改进教程以及源码,戳这!戳这!!戳这!!!B站:AI学术叫叫兽 源码在相簿的链接中,动态中也有链接,感谢支持!祝科研遥遥领先! YOLOv9全网遥遥领先-最新改进系列:YOLOv9云

CBLUEbenchmark代码跑通
CBLUEbenchmark 跑通 github源地址 1.配置 数据下载 新建文件夹CLBUEDatasets,将数据放在该文件夹下模型下载到github源地址中选择一个模型来下载: 将下载好的模型放在一个专门放模型的文件夹下,我这里是bert 文件如下所示放置: 2.训练模型(以CMeEE任务为例): 首先更改examples\run_ee.sh文件 #!/usr/bin/env b

基于深度学习YOLOv8+Pyqt5的工地安全帽头盔佩戴检测识别系统(源码+跑通说明文件)
wx供重浩:创享日记 对话框发送:318安全帽 获取完整源码源文件+7000张已标注的数据集+训练好的模型+配置说明文件 可有偿59yuan一对一远程操作配置环境跑通程序 效果展示(图片检测+批量检测+视频检测+摄像头检测) 基于深度学习YOLOv8+Pyqt5的工地安全帽头盔佩戴检测识别系统(源码+跑通说明文件) 各文件说明 模型评价指标 精确度(Pr

用TensorRT-LLM跑通BLOOM模型
零、参考资料 NVIDIA官方 Github链接 一、构建 TensorRT-LLM的docker镜像 git lfs installgit clone https://github.com/NVIDIA/TensorRT-LLM.gitcd TensorRT-LLMgit submodule update --init --recursivemake -C docker rele
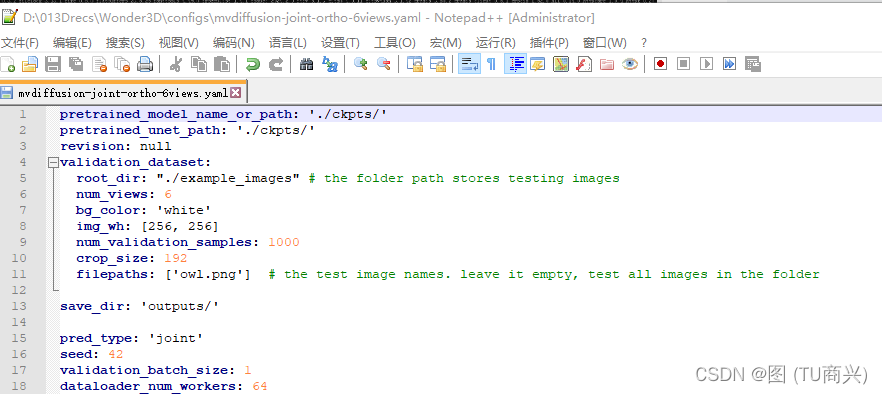
【AIGC大模型】跑通wonder3D (windows)
论文链接:https://arxiv.org/pdf/2310.15008.pdf windows10系统 显卡:NVIDIA rtx 2060 一、安装anaconda 二、安装CUDA 11.7 (CUDA Toolkit 11.7 Downloads | NVIDIA Developer) 和 cudnn 8.9.7(cuDNN Archive | NVIDIA
用TensorRT-LLM跑通chatGLM_6B模型
零、参考资料 NVIDIA官网 THUDM的Github NVIDIA的Github 一、构建 TensorRT-LLM的docker镜像 git lfs installgit clone https://github.com/NVIDIA/TensorRT-LLM.gitcd TensorRT-LLMgit submodule update --init --recursives
用TensorRT-LLM跑通chatGLM2_6B模型
零、参考资料 NVIDIA官网 THUDM的Github NVIDIA的Github 一、构建 TensorRT-LLM的docker镜像 git lfs installgit clone https://github.com/NVIDIA/TensorRT-LLM.gitcd TensorRT-LLMgit submodule update --init --recursives

RTSP的例子终于跑通了,后面再花点时间梳理下,RTSP协议的学习就可以告一段落了,下一站SIP协议!~加油
自己动手做的RTSP的例子终于跑通可以与Live555的RTSP Server交互了。 后面再花点时间梳理下,RTSP协议的学习就可以告一段落了。 下一站SIP协议!~加油

docker+jenkins+k8s集群搭建系列二、docker+jenkins实现自动部署java项目(自动制作镜像、启动容器)-----单机跑通,下篇集群
上篇文章docker+jenkins+k8s集群搭建系列一、centos安装docker,制作镜像(jar包,使用Dockerfile制作镜像),启动容器中我们学习了在docker环境下使用Dockerfile文件手动给项目制作镜像,启动容器部署项目,这篇文章我们把这个流程交给jenkins,实现项目代码提交即刻自动部署。 使用工具: jdk: 链接:https://pan.baidu.com/s
跑通A-LOAM并保存点云地图!
本文旨在帮助读者迅速跑通3D激光SLAM算法A-LOAM!代码解读请参考笔者专栏: A-LOAM源码详解,激光雷达配置参考单、双激光雷达启动与双激光雷达的外参标定(VLP-16)。 废话不多说,直接开始! 一、A-LOAM安装 A-LOAM需要用到ceres库与pcl库,请确保已完成安装。 A-LOAM下载编译: #创建工作空间mkdir -p ~/aloam_ws/srccd ~

VINS-fusion 跑通Euroc、TUM、KITTI数据集,以及评估工具EVO的下载和使用
零、EVO工具获取与使用 ubuntu20.04中python版本是3.x,因此对应的pip工具会变成pip3,可以先参考如下链接查看自己系统的python和pip版本。 Ubuntu20.04安装evo(详细教程)【亲测有效】_ubantu20.04 evo_学无止境的小龟的博客-CSDN博客 再调用如下命令对evo工具进行安装 pip3 install evo --upgrade --
算能SE5-16跑通PP-OCR实例
一、前言 1.1、硬件设备及平台 我使用的虚拟机是Ubuntu20.04 海康摄像头的型号是:MV-CS050-10GMGC 算能平台是: SE5-16 算能的SDK版本是SDK-23.07.01 1.2、相关资料 算能官网:算能 (sophgo.com) 算能教学视频:教学视频 SE5-15手册: SE5-16使用手册 PP-OCR例程:sophon-demo/sampl
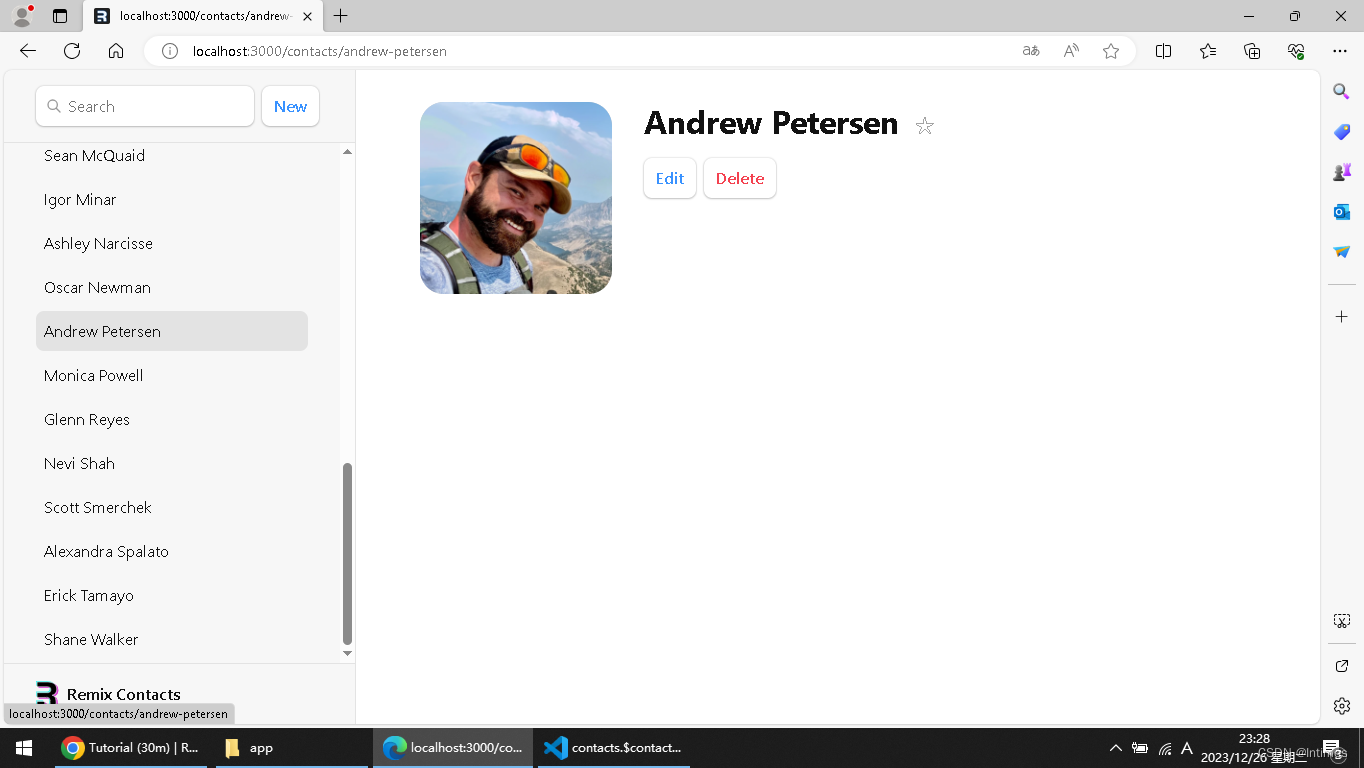
VScode跑通Remix.js官方的contact程序开发过程
目录 1 引言 2 安装并跑起来 3 设置根路由 4 用links来添加风格资源 5 联系人路由的UI 6 添加联系人的UI组件 7 嵌套路由和出口 8 类型推理 9 Loader里的URL参数 10 验证参数并抛出响应 书接上回,我们已经跑通了remix的quick start项目,接下来看看第2个教程,官网宣称耗时30分钟来学习。 1 引言 We'll be
视频号小店如何运营?流程跑通就成功了一大半!
我是电商珠珠 视频号小店是视频号团队发展的电商平台,目前处于项目的风口期,很多有想法的新手并不知道应该怎么去运营,今天我就来给大家讲一下。 一、入驻 视频号小店入驻的门槛较高,需要准备一张企业的营业执照,身份证、银行卡、对公账户、视频号这些。 资金的话需要准备5000元的类目保证金和1w-2w左右的流动资金。 准备好这些之后就可以入驻了。 二、类目 入驻的时候类目很关键,定类目就等于
《Image Provenance Analysis at Scale》论文跑通源码
1.起因 做毕设正好要做图片溯源(provenance)这方面的内容,因此下载了代码,跑通的过程缺异常痛苦,装包,装虚拟环境,部署代码到服务器等等等等(这些都写过博客),而且跑通代码需要GPU,服务器的GPU被占用就跑不了。而且中间索引步骤每次都要跑30-50分钟,bug多了总是容易放弃,拖拖拉拉花了快一个月才跑完,别的不说,至少看源码能力有了很大的进步。 这里贴上源码的GitHub链接:ht

【LSTM】北京pm2.5 天气预测--pytorch版本,有代码可以跑通-LSTM回归问题,工程落地一网打尽
文章目录 前言1. 知识理解1.1 核心理解1.2 原理1.2.1 图解LSTM1.2.1 分词1.2.1 英语的词表示1.2.2 中文的词表示1.2.3 构建词表 2. 工程代码2.1 数据预处理2.2 数据集&模型构建2.3 模型训练2.4 保持模型&加载模型&预测 前言 LSTM 少分析原理,更强调工程落地,今年年初有两篇LSTM的回归文章,是keras实现的。 《
Django+Vue项目创建 跑通
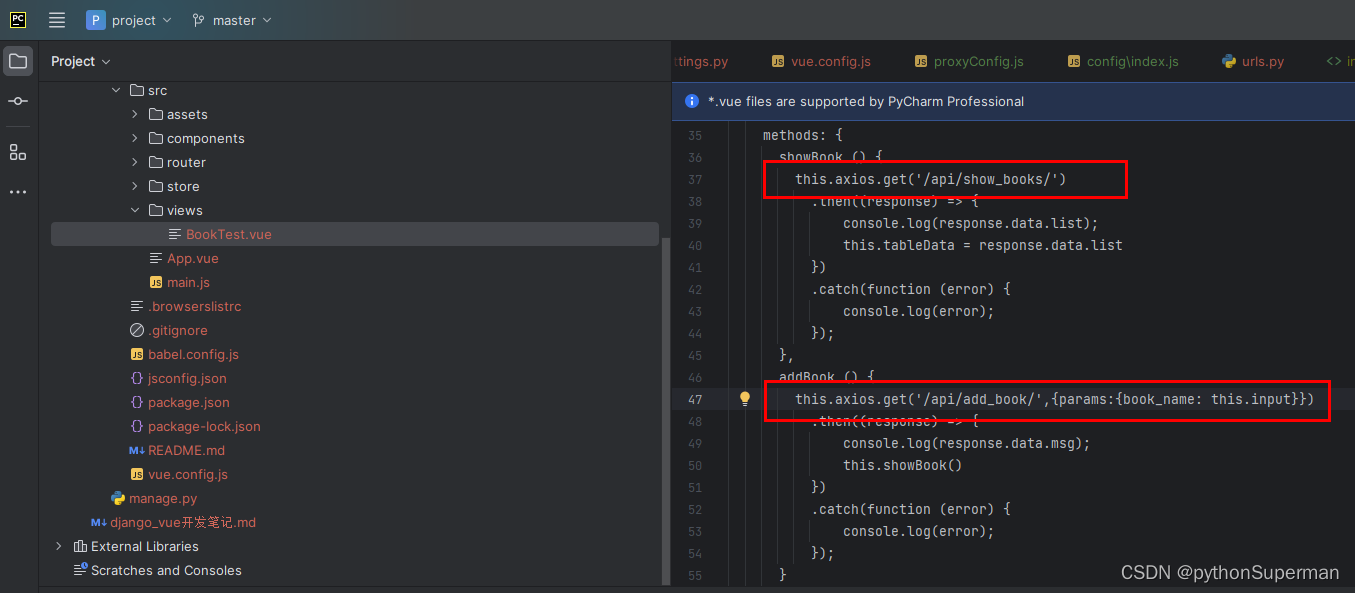
参考链接: 【精选】Django+Vue项目构建_django vue-CSDN博客 一、背景 主要介绍如何使用后端Django + 前端Vue 的技术栈快速地搭建起一套web项目的框架。 为什么使用Django和Vue? Django是Python体系下最成熟的web框架之一,由于Python语言的易用性和受众面广,Django框架也因其能够快速开发网站

MLU370-M8轻轻松松跑通Qwen-7B-chat
这一期我们将快速让千问7B快速跑通在国产芯片MLU370-M8卡上,后续会更新更多有关于LORA、预训练、RLHF、SFT,Embedding、Fintuning等得操作过程,尽情期待 Qwen-7B-chat在MLU370-M8上实现 前言一、环境准备二、模型下载1.魔塔社区引入2.代码修改3.代码运行 效果展示 前言 通义千问-7B(Qwen-7B) 是阿里云研发
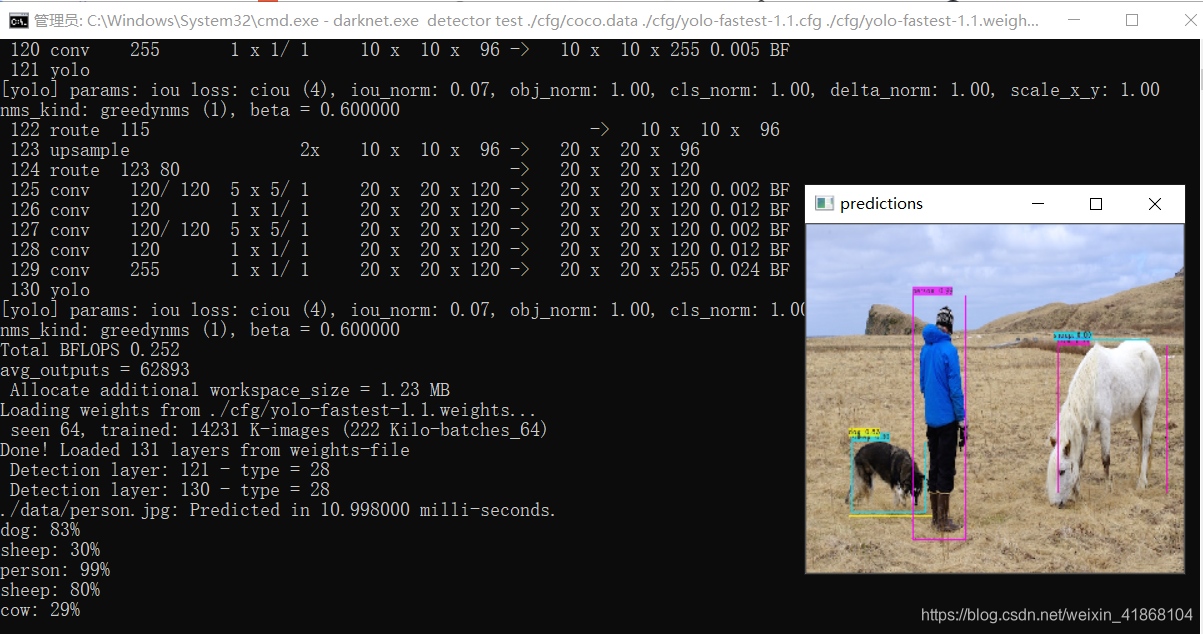
跑通YOLO-Fastest
跑通YOLO-Fastest 一、代码来源 https://github.com/dog-qiuqiu/Yolo-Fastest 二、环境配置 1.win10 2.cuda10.2+cudnn 3.opencv451 4.vs2015 5.cmake 三、编译代码 1.修改Makefile配置 GPU=1CUDNN=1CUDNN_HALF=0OPENCV=1AVX=1OPE

用笔记本自带摄像头跑通ros1 ORB_SLAM3单目程序
环境:ubuntu20.4 ros1 noetic 联想think pad x230自带摄像头 没有安装好ORB_SLAM3请参考 https://fishros.org.cn/forum/topic/842/视觉slam-orb_slam3在ubuntu18-04-ubuntu20-04-安装运行测试orb_slam3 适配单目 双目 rgbd摄像头,最容易跑通的是单目,用笔记本自带的摄像头