本文主要是介绍算能SE5-16跑通PP-OCR实例,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、前言
1.1、硬件设备及平台
我使用的虚拟机是Ubuntu20.04
海康摄像头的型号是:MV-CS050-10GMGC
算能平台是: SE5-16
算能的SDK版本是SDK-23.07.01
1.2、相关资料
算能官网:算能 (sophgo.com)
算能教学视频:教学视频
SE5-15手册: SE5-16使用手册
PP-OCR例程:sophon-demo/sample/PP-OCR at release · sophgo/sophon-demo (github.com)
SophonSDK 开发指南:SophonSDK V23.07.01
基于最新SOPHONSDK快速跑通一个SoC模式(我哭死,我开发的时候怎么不出一个这样的视频):最新教学视频
1.3、重要说明
开发环境与运行环境
开发环境:是指用于模型转换或验证以及程序编译等开发过程的环境;
运行环境:是指在具备Sophon设备的平台上实际使用设备进行算法应用部署的运行环境。
开发环境与运行环境可能是统一的(如插有SC5加速卡的x86主机,既是开发环境又是运行环境),也可能是分离的(如使用x86主机作为开发环境转换模型和编译程序,使用SE5盒子部署运行最终的算法应用)。
PCIE模式和Soc模式
PCIE模式:需要将PCIE加速卡插到主机中,在宿主机上安装驱动程序,然后按照指引配置docker环境,这个环境既是开发环境也是运行环境。当然,也可以基于算能提供的docker开发环境,只保留系统运行时库的相关包,并添加需要的库包以及其他程序代码,构建自己部署在生产环境中的docker镜像。
Soc模式:需要按照指引配置docker环境,docker将工作在CModel模式,提供模型转换和程序交叉编译的开发环境;待程序编译好后,需要手动将编译好的程序拷贝到目标系统(SE5/SM5)中运行执行。
这两个模式要先分清楚,两个模式有着不同的配置方法。如果你买的是人工智能加速卡系列,那么你就是用PCIE模式。如果你买的是智算模组系列,那么你就是用Soc模式。下文的配置都是以Soc模式为主,想看PCIE模式配置的童鞋可以溜溜球了。
1.4、整体思路
- 通过海康的摄像头获取图片信息
- 使用Qt写一个ui界面进行人机交互
- 将图片信息发送给SE5平台(这里采用的是NFS挂载的方法)
- SE5平台上完成模型的运行
- 将识别完成的图片发送回Qt,并在窗口进行显示
二、SE5连接并配置环境
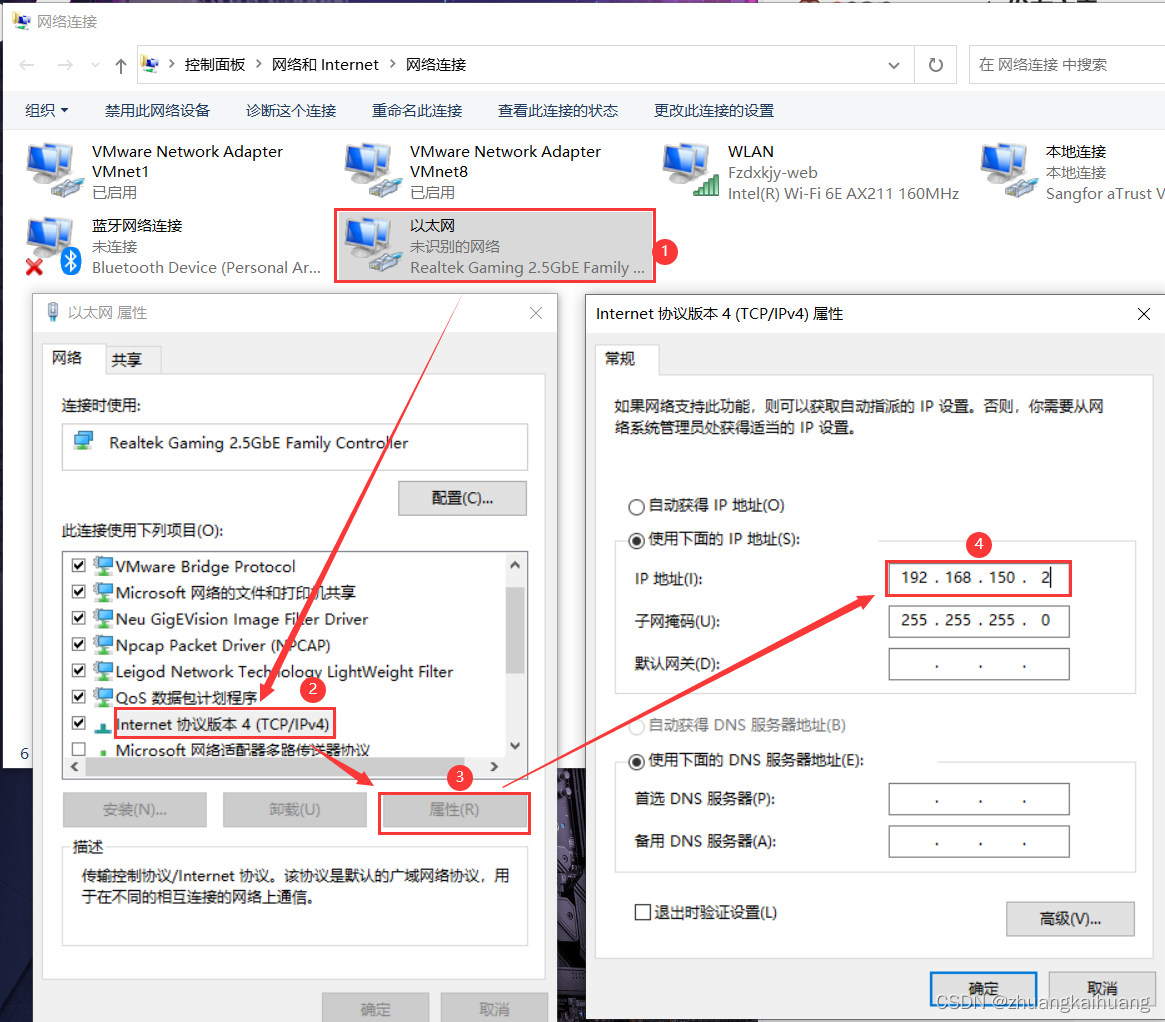
2.1、X86上位机IP设置
首先用网线把SE5的Lan口与上位机进行连接,然后在网络连接设置里修改主机的IP地址。这里的IP地址要设置成和SE5在同一个网段(SE5盒子IP:192.168.150.1),所以我们可以设置为192.168.150.2。
2.2、连接SE5
首先查看一下SE5的工作状态是否正常,具体可以查看官方手册 SE5-16使用手册
一般来说绿灯常亮就是正常工作(如下图所示)

连接方式一:在浏览器上直接进入(前提是SE5正常开启,并处在正常工作状态下)AI边缘计算盒管理后台

连接方式二:使用SecureCRT连接,点击闪电的符号进到Quick Connect界面,输入Host为192.168.150.1,Username为linaro,密码也是linaro。


当你看到以下界面的时候就说明你已经成功连接上了SE5:
2.3、配置SE5的开发环境
2.3.1、新建一个VMware虚拟机作为 X86虚拟机
这里我使用的系统是Ubuntu20.04,所以你需要去下载一个Ubuntu20.04的光盘映像文件。这里我就不过多赘述,不懂的童鞋可以去看看这篇博客:
VMware虚拟机下安装Ubuntu20.04(保姆级教程)_ubuntu 20.04 虚拟机-CSDN博客
注意!!!新建的磁盘容量设置大一点最好不低于30GB,不然后期如果模型比较大还需要重新拓展磁盘容量,多一事不如少一事。
这里附录几个链接有需要的自己看一下:
Ubuntu20.04 更换镜像源步骤
Ubuntu20.04安装中文输入法
Ubuntu20.04开启root账户
Ubuntu20.04实现共享文件夹
2.3.2、下载SDK到Ubuntu20.04
去到算能官网,下载需要的版本,再将其拷贝至虚拟机中。根据你下载的版本把 SOPHONSDK 开发指南文档也下载,下载打开后直接看到3.4节配置SE5的环境。


2.3.3、根据SOPHONSDK 开发指南文档配置基础环境
2.3.3.1、解压SDK压缩包
sudo apt-get install p7zipsudo apt-get install p7zip-full7z x Release_<date>-public.zipcd Release_<date>-public2.3.3.2、tpu-mlir 环境初始化
1. Docker 安装
若已安装docker,请跳过本节。 执行以下脚本安装 docker 并将当前用户加入 docker 组,获得 docker 执行权限。
# 安装docker
sudo apt-get install docker.io
sudo systemctl start docker
sudo systemctl enable docker
# docker命令免root权限执行
# 创建docker用户组,若已有docker组会报错,可忽略
sudo groupadd docker
# 将当前用户加入docker组
sudo usermod -aG docker $USER
# 重启docker服务
sudo service docker restart
# 切换当前会话到新group或重新登录重启会话
newgrp docker
2. 将压缩包解压到tpu-mlir
cd tpu-mlir_<date>_<hash>mkdir tpu-mlirtar zxvf tpu-mlir_v<x.y.z>-<hash>-<date>.tar.gz --strip-components=1 -C tpu-mlir3. 创建docker容器并进入Docker
cd tpu-mlir#如果当前系统没有对应的镜像,会自动从docker hub上下载;#此处将tpu-mlir的当前目录映射到docker内的/workspace目录#myname只是举个名字的例子, 请指定成自己想要的容器的名字docker run --privileged --name myname -v $PWD:/workspace -it sophgo/tpuc_dev:v2.24. 初始化软件环境
cd /workspace/tpu-mlirsource ./envsetup.sh请注意,如果docker stop后重新进入,则需要重新source环境变量。
2.3.3.3、tpu-nntc 环境初始化
1. 将压缩包解压到tpu-nntc
cd tpu-nntc_<date>_<hash>mkdir tpu-nntctar zxvf tpu-nntc_v<x.y.z>-<hash>-<date>.tar.gz --strip-components=1 -C tpu-nntc3. 创建docker容器并进入Docker
cd tpu-nntc#如果当前系统没有对应的镜像,会自动从docker hub上下载;此处将tpu-nntc的上一级目录映射到docker内的/workspace目录;这里用了8001到8001端口的映射(使用ufw可视化工具会用到端口号)。#如果端口已被占用,请根据实际情况更换为其他未占用的端口。docker run -v $PWD/..:/workspace -p 8001:8001 -it sophgo/tpuc_dev:v2.14. 初始化软件环境
cd /workspace/tpu-nntcsource scripts/envsetup.sh请注意,如果docker stop后重新进入,则需要重新source环境变量。
2.3.3.4、libsophon 环境搭建
1. 如果您使用的是Debian/Ubuntu系统,安装包由三个文件构成:sophon-driver_<x.y.z>_$arch.deb、sophon-libsophon_<x.y.z>_$arch.deb、sophon-libsophon-dev_<x.y.z>_$arch.deb
注解
其中,<x.y.z> 指版本号,$arch 指当前机器的硬件架构,使用如下命令可获取当前服务器的arch。通常x86_64机器对应的硬件架构是amd64,arm64机器对应的硬件架构是arm64。请选择您对应的安装文件进行安装。
#查询一下系统的架构,我的硬件架构是amd64uname -mcd libsophon_<date>_<hash># 安装依赖库,只需要执行一次sudo apt install dkms libncurses5sudo dpkg -i sophon-*.deb# 在终端执行如下命令,或者log out再log in当前用户后即可使用bm-smi等命令source /etc/profile2.3.3.5、sophon-mw 环境搭建
在安装sophon-mw时,请确保已经安装libsophon。
1. 如果您使用的是Debian/Ubuntu系统,安装包由四个文件构成,分别为:sophon-mw-sophon-ffmpeg_<x.y.z>_$arch.deb、sophon-mw-sophon-ffmpeg-dev_<x.y.z>_$arch.deb、sophon-mw-sophon-opencv_<x.y.z>_$arch.deb、sophon-mw-sophon-opencv-dev_<x.y.z>_$arch.deb,请选择您对应的安装文件参考如下步骤进行安装:
cd sophon-mw_<date>_<hash># 必须先安装sophon-mw-sophon-ffmpeg,再安装sophon-mw-sophon-opencvsudo dpkg -i sophon-mw-sophon-ffmpeg_<x.y.z>_*.deb sophon-mw-sophon-ffmpeg-dev_<x.y.z>_*.debsudo dpkg -i sophon-mw-sophon-opencv_<x.y.z>_*.deb sophon-mw-sophon-opencv-dev_<x.y.z>_*.deb# 在终端执行如下命令,或者log out再log in当前用户后即可使用安装的工具source /etc/profile2.3.3.6、交叉编译环境搭建
如果您希望使用SophonSDK搭建交叉编译环境,您需要用到gcc-aarch64-linux-gnu工具链,再将程序所依赖的头文件和库文件打包到soc-sdk目录中。
1. 首先安装工具链:
sudo apt-get install gcc-aarch64-linux-gnu g++-aarch64-linux-gnu2. 解压sophon-img包里的libsophon_soc_<x.y.z>_aarch64.tar.gz,将lib和include的所有内容拷贝到soc-sdk文件夹。
cd sophon-img_<date>_<hash># 创建依赖文件的根目录mkdir -p soc-sdk# 解压sophon-img release包里的libsophon_soc_${x.y.z}_aarch64.tar.gz,其中x.y.z为版本号tar -zxf libsophon_soc_<x.y.z>_aarch64.tar.gz# 将相关的库目录和头文件目录拷贝到依赖文件根目录下cp -rf libsophon_soc_<x.y.z>_aarch64/opt/sophon/libsophon-<x.y.z>/lib ${soc-sdk}cp -rf libsophon_soc_<x.y.z>_aarch64/opt/sophon/libsophon-<x.y.z>/include ${soc-sdk}3. 解压sophon-mw包里的sophon-mw-soc_<x.y.z>_aarch64.tar.gz,将sophon-mw下lib和include的所有内容拷贝到soc-sdk文件夹。
cd sophon-mw_<date>_<hash># 解压sophon-mw包里的sophon-mw-soc_<x.y.z>_aarch64.tar.gz,其中x.y.z为版本号tar -zxf sophon-mw-soc_<x.y.z>_aarch64.tar.gz# 将ffmpeg和opencv的库目录和头文件目录拷贝到依赖文件根目录下cp -rf sophon-mw-soc_<x.y.z>_aarch64/opt/sophon/sophon-ffmpeg_<x.y.z>/lib ${soc-sdk}cp -rf sophon-mw-soc_<x.y.z>_aarch64/opt/sophon/sophon-ffmpeg_<x.y.z>/include ${soc-sdk}cp -rf sophon-mw-soc_<x.y.z>_aarch64/opt/sophon/sophon-opencv_<x.y.z>/lib ${soc-sdk}cp -rf sophon-mw-soc_<x.y.z>_aarch64/opt/sophon/sophon-opencv_<x.y.z>/include ${soc-sdk}2.3.3.7、验证
您可以执行以下命令,验证开发环境中的交叉编译工具链是否配置成功:
which aarch64-linux-gnu-g++# 终端输出内容# /usr/bin/aarch64-linux-gnu-g++如果终端输出了aarch64编译的路径,则说明交叉编译工具链正确,开发环境是可以正常使用的。
2.3.4、环境配置-SoC
2.3.4.1、开发环境配置
对于SoC模式,模型转换也需要在docker开发容器中完成;C/C++程序建议在x86主机上使用交叉编译工具链编译生成可执行文件后,再拷贝到SoC目标平台运行。docker开发容器的配置参照前述章节相关内容。
注意:
1. 请先使用 bm_version 命令查看微服务器中的SDK版本与当前SDK版本是否一致,如果不一致,请参考《 SOPHON BSP开发参考手册 》中的 软件安装 章节对微服务器进行软件更新。
2. SE微服务器目前已经不再预置人脸抓拍应用gate,gate应用也将不再维护。后续我们也会将SE微服务器的默认系统升级为Ubuntu 20.04,并自带一个web界面用于查询和配置基础信息;同时使用qt编写了一个简易的界面以方便用户配置IP,您可以连接HDMI接口到显示器查看,并使用键鼠一体的套装进行相应操作。
3. SE微服务器自带的操作系统并没有桌面系统,您需要使用ssh登录到微服务器终端内进行操作开发。
2.3.4.2、运行环境配置
对于SoC平台,内部已经集成了相应的libsophon、sophon-opencv和sophon-ffmpeg运行库包,位于/opt/sophon/下。只需设置环境变量即可。
# 设置环境变量
export PYTHONPATH=$PYTHONPATH:/opt/sophon/sophon-opencv_<x.y.z>/opencv-python2.4、SE5的软件更新
通过ssh连接到SE5,输入bm_version可以看到当前SE5的SDK版本。这里有要求要和虚拟机的SDK版本一致,如果不至于需要对SE5进行软件升级,这里我采用最简单也是最稳妥的SD卡更新。其他办法可以参考使用文档。
首先我们需要一张啥也没有的SD卡,将SDK的镜像文件拷贝过去。镜像文件在你下载的SDK包中的sophon-img文件夹内,参照我的就是在D:\文件\VM_Share\SophonSDK\Release_230701-public\sophon-img_20230810_221353内。

将上图的sdcard压缩包全部解压至SD卡内,然后把SE5关机并断电,打开SE5背面的SD卡盖子安装好SD后,直接上电即可。更新完后一样通过ssh连接到SE5,输入bm_version查看SDK版本是否一致。
三、PP-OCR环境配置与跑通
这里简单介绍一下PP-OCR,主要用在识别文字,支持中英文数字组合识别、竖排文本识别、长文本识别。
3.1、 PP-OCR例程下载
1、先进入到算能的github库去下载全部的例程sophgo/sophon-demo (github.com)

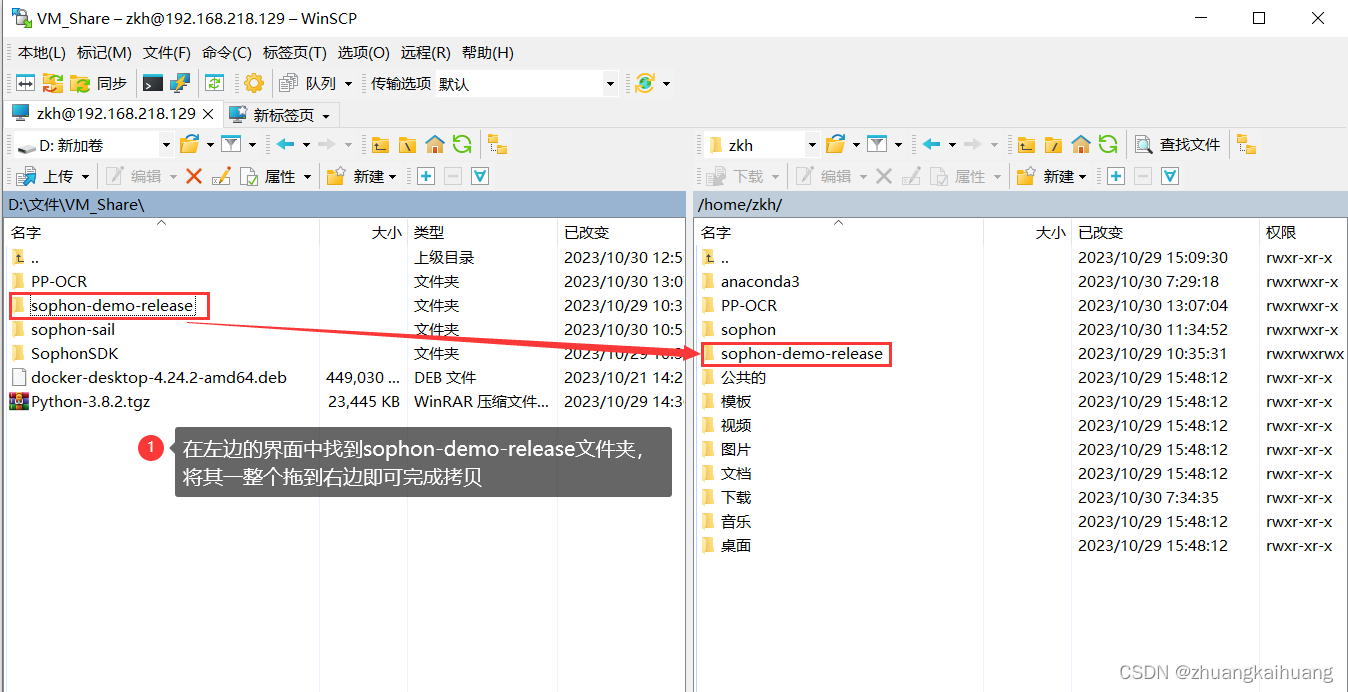
2、在sophon-demo-release\sample里面可以找到PP-OCR的源代码,其他的例程也是同理。

3、将sophon-demo-release整个文件夹拷贝至虚拟机中,这里我用的是WinSCP,你也可以使用共享文件夹等其他的方法。
3.2、准备模型与数据
1、直接使用算能提供的脚本下载,最简单,最省事。在sophon-demo-release/sample/PP-OCR/scripts目录下提供了相关模型和数据的下载脚本download.sh。
# 安装unzip,若已安装请跳过,非ubuntu系统视情况使用yum或其他方式安装
sudo apt install unzip
chmod -R +x scripts/
./scripts/download.sh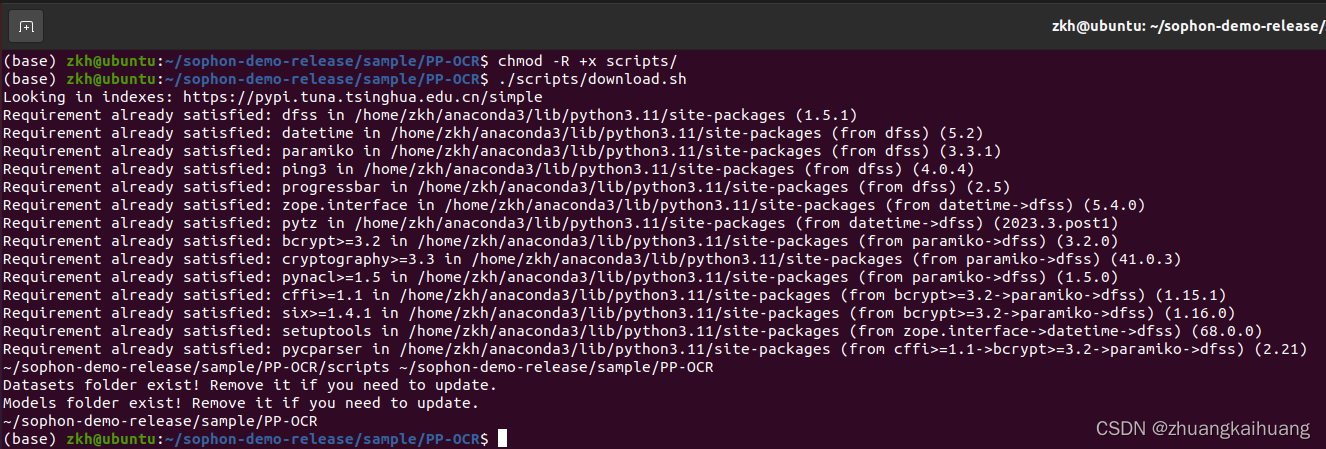
- 我这里已经安装过了,所以他会说文件存在。
- 下载完的文件会在sophon-demo-release/sample/PP-OCR/datasets目录下找到。
- 下载的模型包括:
├── BM1684
│ ├── ch_PP-OCRv3_cls_fp32.bmodel # 使用TPU-MLIR编译,用于BM1684的FP32 BModel,由batch_size=1和batch_size=4的模型combine得到。
│ ├── ch_PP-OCRv3_det_fp32.bmodel # 使用TPU-MLIR编译,用于BM1684的FP32 BModel,由batch_size=1和batch_size=4的模型combine得到。
│ ├── ch_PP-OCRv3_rec_fp32.bmodel # 使用TPU-MLIR编译,用于BM1684的FP32 BModel,由batch_size=1和batch_size=4的模型combine得到。
├── BM1684X
│ ├── ch_PP-OCRv3_cls_fp16.bmodel # 使用TPU-MLIR编译,用于BM1684X的FP16 BModel,由batch_size=1和batch_size=4的模型combine得到。
│ ├── ch_PP-OCRv3_cls_fp32.bmodel # 使用TPU-MLIR编译,用于BM1684X的FP32 BModel,由batch_size=1和batch_size=4的模型combine得到。
│ ├── ch_PP-OCRv3_det_fp16.bmodel # 使用TPU-MLIR编译,用于BM1684X的FP16 BModel,由batch_size=1和batch_size=4的模型combine得到。
│ ├── ch_PP-OCRv3_det_fp32.bmodel # 使用TPU-MLIR编译,用于BM1684X的FP32 BModel,由batch_size=1和batch_size=4的模型combine得到。
│ ├── ch_PP-OCRv3_rec_fp16.bmodel # 使用TPU-MLIR编译,用于BM1684X的FP16 BModel,由batch_size=1和batch_size=4的模型combine得到。
│ ├── ch_PP-OCRv3_rec_fp32.bmodel # 使用TPU-MLIR编译,用于BM1684X的FP32 BModel,由batch_size=1和batch_size=4的模型combine得到。
├── onnx # 原始模型的onnx版本
└── paddle # 原始模型的paddlepaddle版本- 下载的数据包括:
├── cali_set_det # 检测模型量化用的数据集
├── cali_set_rec # 分类、识别模型量化用的数据集
├── fonts # 字体
├── ppocr_keys_v1.txt # 汉字集合
├── train_full_images_0 # ICDAR-2019训练集
└── train_full_images_0.json # ICDAR-2019 ground truth文件2、您也可以自己准备模型和数据集,并参考3.3模型编译进行模型转换。建议使用TPU-MLIR编译BModel,Paddle模型在编译前要导出成onnx模型。具体可参考Paddle部署模型导出和Paddle2ONNX文档。
3.3、模型编译
我这里直接使用下载好的BModel,如果需要自己进行模型编译可以参考一下官方的例程https://github.com/sophgo/sophon-demo/tree/release/sample/PP-OCR#4-%E6%A8%A1%E5%9E%8B%E7%BC%96%E8%AF%91
3.4、推理测试
这里有两种测试方法,分别是C++和Python。下面我用C++例程实现, Python的例程可以参考以下文档:Python例程
3.4.1、 交叉编译环境搭建
之前我们在2.3.3.6、交叉编译环境搭建 已经实现了libsophon、sophon-ffmpeg、sophon-opencv的安装,但是我们还需要安装一个sophon-sail,步骤如下:
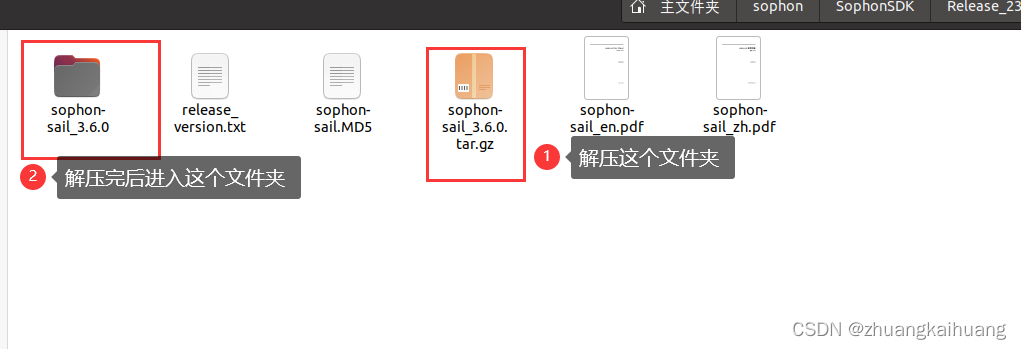
-
sophon-sail源码在我们下载的SDK文件夹中。解压sophon-sail源码并进入其源码目录。

-
创建编译文件夹build,并进入build文件夹

-
执行编译命令
注意:这里的路径一定要确定好,后面如果有报错90%都是这里出来问题
DCMAKE_TOOLCHAIN_FILE:就是在你解压的sophon-sail文件夹下的cmake文件夹,cmake后面的路径不用管,只需确定一下前面的。因为当前是在build文件夹内,所以我们要返回上一层的路径,故这里的路径要写成../camke/.......
DLIBSOPHON_BASIC_PATH: 这里有个坑啊,这里的libsophon并不是我们之前2.3.3.4、libsophon 环境搭建 配置的那个。我因为这个问题卡了好久,后来才发现是在sophon-img中的libsophon_soc才是对的
DFFMPEG_BASIC_PATH和DOPENCV_BASIC_PATH:就是之前在2.3.3.6、交叉编译环境搭建 的soc-sdk文件夹内cmake -DBUILD_TYPE=soc -DBUILD_PYSAIL=OFF \-DCMAKE_TOOLCHAIN_FILE=../cmake/BM168x_SOC/ToolChain_aarch64_linux.cmake \-DLIBSOPHON_BASIC_PATH=/home/zkh/sophon/SophonSDK/Release_230701-public/sophon-img_20230810_221353/libsophon_soc_0.4.9_aarch64/opt/sophon/libsophon-0.4.9 \-DFFMPEG_BASIC_PATH=/home/zkh/sophon/SophonSDK/Release_230701-public/sophon-mw_20230807_032400/sophon-mw-soc_0.7.0_aarch64/opt/sophon/sophon-ffmpeg_0.7.0 \-DOPENCV_BASIC_PATH=/home/zkh/sophon/SophonSDK/Release_230701-public/sophon-mw_20230807_032400/sophon-mw-soc_0.7.0_aarch64/opt/sophon/sophon-opencv_0.7.0 .. make sail -
安装SAIL动态库及头文件,程序将自动在源码目录下创建‘build_soc’,编译结果将安装在‘build_soc’下面
make install -
将‘build_soc’文件夹下的‘sophon-sail’拷贝至目标SOC的‘/opt/sophon’目录下,即可在soc上面进行调用。拷贝的方法这里就不做介绍了,可以用WinSCP等一系列的方法。

-
在SE5上设置一下环境变量
sudo echo "export LD_LIBRARY_PATH=/opt/sophon/sophon-sail/lib/:$LD_LIBRARY_PATH" >> ~/.bashrc source ~/.bashrc
3.4.2、使用交叉编译工具链编译生成可执行文件
- 在sophon-demo-release/sample/PP-OCR/cpp文件夹内编写cmake
cd cpp/ppocr_bmcv mkdir build && cd build #请根据实际情况修改-DSDK的路径,需使用绝对路径。 cmake -DTARGET_ARCH=soc -DSDK=/home/zkh/sophon/SophonSDK/Release_230701-public/sophon-img_20230810_221353/soc-sdk .. make - 编译完成后,会在ppocr_bmcv目录下生成ppocr_bmcv.soc。

- 将ppocr_bmcv.soc以及所需要的模型models和datasets打包在一个文件夹内,并拷贝到SE5平台上。模型路径在sophon-demo-release/sample/PP-OCR/

3.4.3、跑通PP-OCR
- 参数说明:可执行程序默认有一套参数,请注意根据实际情况进行传参,以ppocr_bmcv.pcie为例,具体参数说明如下:
# 注意:CPP传参与python不同,需要用等于号,例如./ppocr_bmcv.pcie --bmodel=xxx Usage: ppocr_bmcv.pcie [params] --batch_size (value:4)ppocr system batchsize--bmodel_cls (value:../../models/BM1684X/ch_PP-OCRv3_cls_fp32.bmodel)cls bmodel file path, unsupport now.--bmodel_det (value:../../models/BM1684X/ch_PP-OCRv3_det_fp32.bmodel)det bmodel file path--bmodel_rec (value:../../models/BM1684X/ch_PP-OCRv3_rec_fp32.bmodel)rec bmodel file path--dev_id (value:0)TPU device id--rec_thresh (value:0.5)recognize threshold--help (value:true)print help information.--input (value:../../datasets/cali_set_det)input path, images directory--labelnames (value:../../datasets/ppocr_keys_v1.txt)class names file path -
测试图片
图片测试实例如下,支持对整个图片文件夹进行测试。注意:这里的BModel模型选择要选择相对应的芯片,例如SE5就是BM1684而不是BM1684X。
测试结束后,会将预测的图片保存在results/images下,预测的结果保存在results/下,同时会打印预测结果、推理时间等信息。(PS:下面的代码要在SE5上运行哦)./ppocr_bmcv.soc --input=./datasets/train_full_images_0 \--batch_size=4 \--bmodel_det=./models/BM1684/ch_PP-OCRv3_det_fp32.bmodel \--bmodel_rec=./models/BM1684/ch_PP-OCRv3_rec_fp32.bmodel \--labelnames=./datasets/ppocr_keys_v1.txt -
结果展示
跑完的图片会保存在/PP-OCR/results/images目录下。
四、海康摄像头环境配置
4.1、硬件连接
- 将电脑的网口线接到路由器LAN口(此时电脑的IP为192.168.150.2)
- 将SE5的Lan口接到路由器 LAN口(此时SE5的IP为192.168.150.1)
- 将虚拟机的网络设置到NAT模式,IP设置为192.168.150.3
- 将海康摄像头接到路由器 LAN口
- 至此你就搭建了一个自己的局域网,摄像头、SE5都可以和虚拟机进行数据交互
4.2、MVS安装
- 这里我建议在Win10和Linux系统下都安装
- Win10安装MVS:海康机器人-机器视觉-下载中心 (hikrobotics.com)
- Linux安装MVS:【精选】VMware虚拟机中Ubuntu16.04系统下通过MVS运行海康威视工业相机_海康摄像机的搜索软件怎么在ubntuo打开-CSDN博客
 https://blog.csdn.net/qq_45445740/article/details/122004664?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169383463916800226530653%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169383463916800226530653&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-1-122004664-null-null.142%5Ev93%5Econtrol&utm_term=VMware%E8%99%9A%E6%8B%9F%E6%9C%BA%E4%B8%ADUbuntu16.04%E7%B3%BB%E7%BB%9F%E4%B8%8B%E9%80%9A%E8%BF%87MVS%E8%BF%90%E8%A1%8C%E6%B5%B7%E5%BA%B7%E5%A8%81%E8%A7%86%E5%B7%A5%E4%B8%9A%E7%9B%B8%E6%9C%BA&spm=1018.2226.3001.4187
https://blog.csdn.net/qq_45445740/article/details/122004664?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169383463916800226530653%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169383463916800226530653&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-1-122004664-null-null.142%5Ev93%5Econtrol&utm_term=VMware%E8%99%9A%E6%8B%9F%E6%9C%BA%E4%B8%ADUbuntu16.04%E7%B3%BB%E7%BB%9F%E4%B8%8B%E9%80%9A%E8%BF%87MVS%E8%BF%90%E8%A1%8C%E6%B5%B7%E5%BA%B7%E5%A8%81%E8%A7%86%E5%B7%A5%E4%B8%9A%E7%9B%B8%E6%9C%BA&spm=1018.2226.3001.4187
4.3、linux下海康威视工业相机的sdk二次开发
【精选】Linux环境中对海康威视工业相机SDK进行二次开发(QT+CMake+Opencv+海康SDK)_linux下海康威视工业相机的sdk二次开发-CSDN博客![]() https://blog.csdn.net/qq_45445740/article/details/122026207
https://blog.csdn.net/qq_45445740/article/details/122026207
五、整体PPOCR工程的实现
5.1、NFS挂载
Ubuntu 系统上NFS的安装与使用 - 知乎 (zhihu.com)https://zhuanlan.zhihu.com/p/606174368?utm_id=0
5.2、整体项目演示
这篇关于算能SE5-16跑通PP-OCR实例的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






