g2o专题

vcpkg安装g2o,提示找不到cs.h,debug模式运行提示找不到libcxsparse.dll
1 找不到cs.h 在VS中双击错误提示,定位到csparse_extension.h文件,将 #include<cs.h> 修改为 // #include<cs.h>#include <suitesparse/cs.h> 即可正常编译 2 debug模式找不到libcxsparse.dll 我这边直接使用RelWithDebug模式,使用release版本的动态库,即可正常运

非线性优化库g2o使用教程,探索一些常见的用法,以及信息矩阵、鲁棒核函数对于优化的结果的影响
本篇博客将总结一些常见的g2o用法。通过这篇内容你将至少可以大致掌握g2o的用法,以及一些可以使优化结果更好的小技巧,包括鲁邦和函数、信息矩阵的用法等等。 注意:本篇博客的重点是介绍g2o,所以不会去为非线性化方法做太多的铺垫,因此要想理解以下代码和思路,需要你具备一些非线性优化的理论知识,至少要明白什么是非线性优化,它主要是为了做什么,它是怎么实现的? 我们先来看第一个例子:曲线拟合 1.

g2o_a_general_framework_for_graph_optimaization
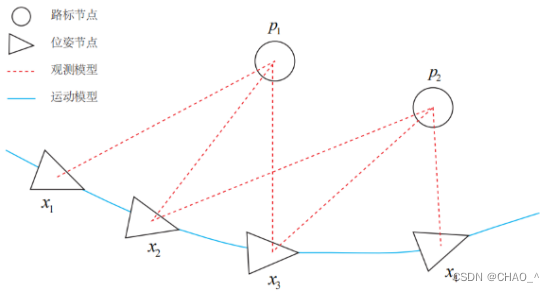
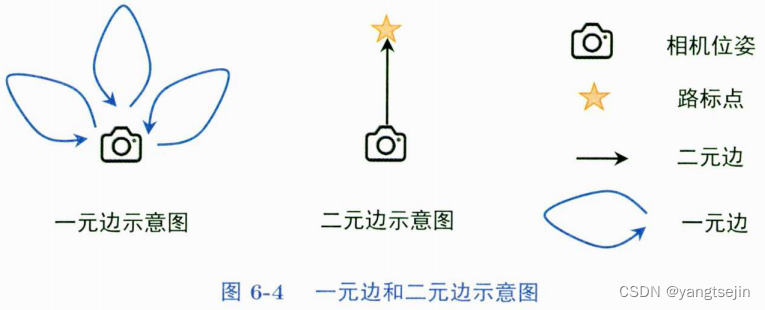
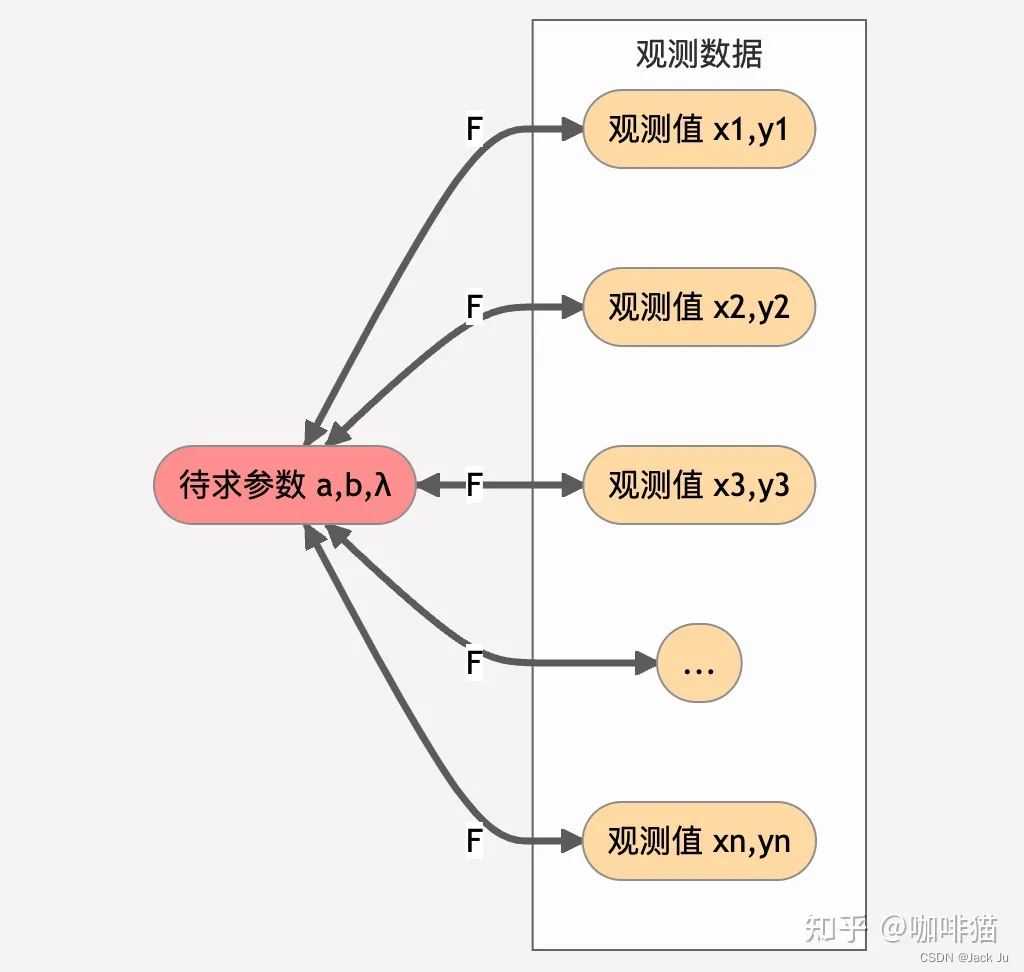
g2o: A General Framework for Graph Optimization NONLINEAR GRAPH OPTIMIZATION USING LEAST-SQUARES 机器人和计算机视觉中的许多问题都可以用下列方程的最小化来求解 F ( x ) = ∑ ⟨ i , j ⟩ ∈ C e ( x i , x j , z i j ) ⊤ Ω i j e ( x i ,
g2o -- curve_fit代码解析
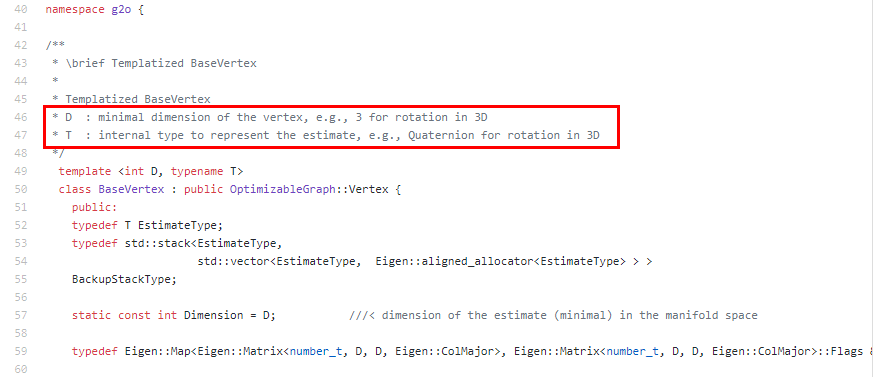
概述 本文介绍通过g2o框架,优化点和曲线的匹配(曲线拟合)。曲线的公式如下所示: 它有三个参数:a, b, lamba。 代码解析 自定义顶点 /*** \brief the params, a, b, and lambda for a * exp(-lambda * t) + b*/class VertexParams : public g2o::BaseVertex<3, E
五月最后一博之 | SLAM图优化库g2o……oooooooooooo
为了庆祝明天的节日,今天来和小狼一起学习一下SLAM最重要的后端优化库——通用图优化库g2o(General Graph Optimization)! 文章内容大部分源于计算机视觉life公众号的整理,感谢! 目录 1. g2o库介绍 2. 掌握g2o的代码套路 3. 构建g2o优化问题 4. 自己定义顶点和边 1. g2o库介绍 GitHub:
g2o--icp代码解析
概要 个人理解Icp是一种location算法。我们先将全局的事物特征化,提取出特征点。在求解过程中,将观察的的图像,同样进行特征化。将全局点与当前特征点进行匹配,就可以求得观察者当前的位姿。 Icp算法通常分为粗匹配和精细匹配两部分。粗匹配是将观察特征点移动到对应全局特征点的附近,而精细匹配这是将一个一个对应的特征点,使用最小二乘优化进行调整。在精细匹配的过程中,特征点对的选取也很重要,ic
G2O中g2o_viewer的编译
由于工作需要,学习一下G2O,这个库是一个算法框架库,可以较为容易的将一些算法加入到这个框架中,目前,G2O提供BA算法,这个是研究的重点。 一般开源的代码,编译起来总是比较麻烦,需要很多第三方的库,这个也不例外,不过,相对还是比较容易,而且是使用CMAKE进行配置和编译,对于初学者还是比较容易滴。下面根据本人的编译经历,详述一下编译过程。 1. 准备材料。 需要g2o代码 ---- 呃,这
用g2o实现拟合曲线
文章目录 安装和编译g2o使用g2o拟合曲线主函数代码CMakeLists.txt编译和运行运行结果 安装和编译g2o git clone -b 20200410_git https://github.com/RainerKuemmerle/g2o.git cd g2o mkdir build && cd build && cmake .. &&

SLAM算法与工程实践——SLAM基本库的安装与使用(6):g2o优化库(3)构建g2o顶点
SLAM算法与工程实践系列文章 下面是SLAM算法与工程实践系列文章的总链接,本人发表这个系列的文章链接均收录于此 SLAM算法与工程实践系列文章链接 下面是专栏地址: SLAM算法与工程实践系列专栏 文章目录 SLAM算法与工程实践系列文章SLAM算法与工程实践系列文章链接SLAM算法与工程实践系列专栏 前言SLAM算法与工程实践——SLAM基本库的安装与使用(6):g2
SLAM算法与工程实践——SLAM基本库的安装与使用(6):g2o优化库(4)构建g2o的边
SLAM算法与工程实践系列文章 下面是SLAM算法与工程实践系列文章的总链接,本人发表这个系列的文章链接均收录于此 SLAM算法与工程实践系列文章链接 下面是专栏地址: SLAM算法与工程实践系列专栏 文章目录 SLAM算法与工程实践系列文章SLAM算法与工程实践系列文章链接SLAM算法与工程实践系列专栏 前言SLAM算法与工程实践——SLAM基本库的安装与使用(6):g2
SLAM本质剖析-G2O(转载,感觉写得不错)
这块还是写得不错的 转载自:https://mp.weixin.qq.com/s/NeveBIh5bb37CUyVVNocLw SLAM本质剖析-G2O 原创 lovely_yoshino 古月居 今天 0 前言 在了解SLAM的原理、流程后,个人经常实时困惑该如何去从零开始去设计编写一套能够符合我们需求的SLAM框架。作者认为Ceres、Eigen、Sophus、G2O
【SLAM】G2O优化库超详细解析
G2O,与ceres并列为目前视觉SLAM中应用最广泛的优化算法库。它最大的特点就是基于图优化设计,这对于视觉SLAM来说是异常适配的。在很多的SLAM库的中都使用到它来进行优化操作,比如ORB-SLAM。 代码仓库:https://github.com/RainerKuemmerle/g2o。 本文所对照的源码版本是2023.9.1日期,因此和网上其他的一些教程版本有些出入,但是总体相差不大

自学SLAM(7)非线性优化实践:曲线拟合问题(使用ceres库和SLAM常用的g2o库)
前言 本次文章针对的是第四个视屏中的实践问题 肯定会有部分方法没有说到,比如高斯牛顿法,后面我会把此次视屏对应的作业写好,然后补充到此次博客!! 文章目录 前言1.曲线拟合题目:2.非线性最小二乘2.1 黄金分割法(0.618法)2.2 最速下降法 3.ceres库实现曲线拟合题目3.1 安装ceres3.2 代码及运行 4.g2o库实现曲线拟合题目4.1 安装g2o4.2
《视觉 SLAM 十四讲》V2 第 6 讲 非线性优化 【高斯牛顿法、列文伯格-马夸尔特方法 、Ceres 库 和 g2o库 】
文章目录 6.1.2 最小二乘 寻找下降增量 Δ x k \Delta\bm{x}_k Δxk的 4 种方法6.2.1 一阶和二阶梯度法(最速下降法、牛顿法)6.2.2 高斯牛顿法6.2.3 列文伯格-马夸尔特方法 【阻尼牛顿法】【信赖区域法】 6.3 实践6.3.1 手写高斯牛顿法 【Code】本讲 CMakeLists.txt 6.3.2 谷歌的优化库 Ceres 【最小二乘问题求
Ubuntu18.4安装g2o
Ubuntu18.4安装g2o 1、下载g2o,解压2 、安装依赖项3、编译4、安装 1、下载g2o,解压 链接github下载地址 直接download的,可以用 2 、安装依赖项 参照g2o中README.md文件的说明,在安装包中 sudo apt-get install cmake libeigen3-dev libsuitesparse-dev qtdeclar

Windows+Visual Studio下生成g2o库教程(结合Cholmod库)
转载请注明出处:http://my.csdn.net/ye_shen_wei_mian 近期初步接触并初步学习了有关SLAM的知识,发现g2o库在SLAM中有非常的重要的应用,特别是应用在以图的形式表达的bundle adjustment的优化。经过一段时间的学习,发现大部分研究和使用g2o的人都是基于Linux系统下的,感觉这和g2o在Windows系统下的非常难配置不无关系。g2o库大致依赖

g2o学习笔记-理解顶点(一)
一、基本了解 g2o主要用来做非线形优化,是一个基于图优化的c++框架,全称General Graphic Optimization 的简称,主要用来优化非线性误差函数。 g2o帮助我们实现了很多内部的算法,只是在进行构造的时候,需要遵循一些规则,使用过程可以多看看例子或者别人的代码,积累别人是怎么使用的。 目前SLAM的后端一般分为两种处理方法,一种是以扩展卡尔曼滤波(EKF)为代表的滤波
第十章g2o_custonbundle/common/projection.h
这个类实现了整个投影过程,对应书上10.2.1里面一直到图10-2 还是挺简单的 #ifndef PROJECTION_H#define PROJECTION_H#include "tools/rotation.h"/*** 这个头文件中只有一个内联函数:带畸变的相机投影* inline bool CamProjectionWithDistortion(const T* camera, co
第十章g2o_custombundle中的common文件夹中的flags文件夹下的command_args.cpp
这篇为上篇的下半部分,也就是.cpp文件的解读。这个文件中主要是对类成员函数的一些定义。一些操作方法还是很常用的。 还是有没细化的地方,后续慢慢搞了。 贴代码: #include "command_args.h"#include <cstdlib>#include <cstring>#include <fstream>#include <algorithm>#include <fu
第十章g2o_custombundle中的common文件夹中的flags文件夹下的command_args.h
先说一下这个flags文件夹下的两个文件: command_args.h和command_args.cpp。 头文件中只定义了一个类:class CommandArgs{} 看下来这个类的作用是一个参数集管理类,它将很多参数看成一个集,集中进行管理。有一些功能:给参数赋默认值、给参数写一个参数描述,给参数通过命令行来赋值等等,程序里会体现。 .h和.cpp两个一起定义了完整的Command
第十章g2oBA的g2o_bal_class.h
先贴上代码: #include <Eigen/Core>#include "g2o/core/base_vertex.h"#include "g2o/core/base_binary_edge.h"#include "ceres/autodiff.h"#include "tools/rotation.h"#include "common/projection.h"//定义相机位姿顶点类,由
第十章g2o_bal_class中顶点增量函数中的Eigen::VectorXd::ConstMapType v ( update, VertexCameraBAL::Dimension );
先贴一下代码: 在相机位姿的顶点类中,增量函数: virtual void oplusImpl ( const double* update ){Eigen::VectorXd::ConstMapType v ( update, VertexCameraBAL::Dimension );_estimate += v;} landmark顶点类中增量函数: virtual void oplu