本文主要是介绍g2o学习笔记-理解顶点(一),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、基本了解
g2o主要用来做非线形优化,是一个基于图优化的c++框架,全称General Graphic Optimization 的简称,主要用来优化非线性误差函数。
g2o帮助我们实现了很多内部的算法,只是在进行构造的时候,需要遵循一些规则,使用过程可以多看看例子或者别人的代码,积累别人是怎么使用的。
目前SLAM的后端一般分为两种处理方法,一种是以扩展卡尔曼滤波(EKF)为代表的滤波方法,一种是以图优化为代表的非线性优化方法。
简单说下EKF,在计算资源受限、待估计量比较简单的情况下,EKF为代表的滤波方法比较有效,经常用在激光SLAM中。它的一个大缺点就是存储量和状态量是平方增长关系,因为存储的是协方差矩阵,因此不适合大型场景。而现在基于视觉的SLAM方案,路标点(特征点)数据很大,滤波方法根本吃不消,所以此时滤波的方法效率非常低。
因此图优化的理论开始出来。
在SLAM里,图优化一般分解为两个任务:
1、构建图。机器人位姿作为顶点,位姿间关系作为边。
2、优化图。调整机器人的位姿(顶点)来尽量满足边的约束,使得误差最小。
比如一个机器人在房屋里移动,它在某个时刻 t 的位姿(pose)就是一个顶点,这个也是待优化的变量。而位姿之间的关系就构成了一个边,比如时刻 t 和时刻 t+1 之间的相对位姿变换矩阵就是边,边通常表示误差项。
顶点:待优化变量
边:连接变量,由于带误差,因此叫误差项
边起到了约束的作用,使得图优化向着满足边约束的方向优化,最后得到了一个优化后的地图。
1.1 g2o的基本框架结构
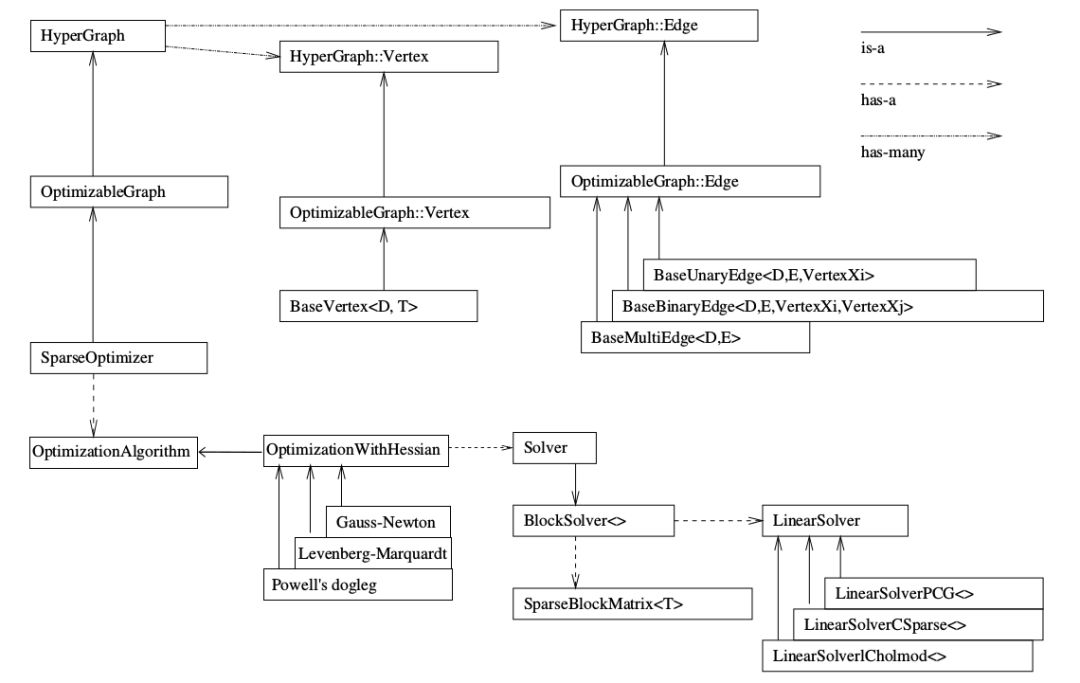
SparseOptimizer是整个图的核心,我们注意右上角的 is-a 实心箭头,这个SparseOptimizer它是一个Optimizable Graph,从而也是一个超图(HyperGraph)。
超图包含了许多顶点(HyperGraph::Vertex)和边(HyperGraph::Edge)。而这些顶点顶点继承自 Base Vertex,也就是OptimizableGraph::Vertex,而边可以继承自 BaseUnaryEdge(单边), BaseBinaryEdge(双边)或BaseMultiEdge(多边),它们都叫做OptimizableGraph::Edge。
整个图的核心SparseOptimizer 包含一个优化算法(OptimizationAlgorithm)的对象。OptimizationAlgorithm是通过OptimizationWithHessian 来实现的。其中迭代策略可以从Gauss-Newton(高斯牛顿法,简称GN), Levernberg-Marquardt(简称LM法), Powell's dogleg 三者中间选择一个(我们常用的是GN和LM)。
那么如何求解呢?OptimizationWithHessian 内部包含一个求解器(Solver),这个Solver实际是由一个BlockSolver组成的。这个BlockSolver有两个部分,一个是SparseBlockMatrix ,用于计算稀疏的雅可比和Hessian矩阵;一个是线性方程的求解器(LinearSolver),它用于计算迭代过程中最关键的一步HΔx=−b,LinearSolver有几种方法可以选择:PCG, CSparse, Choldmod。
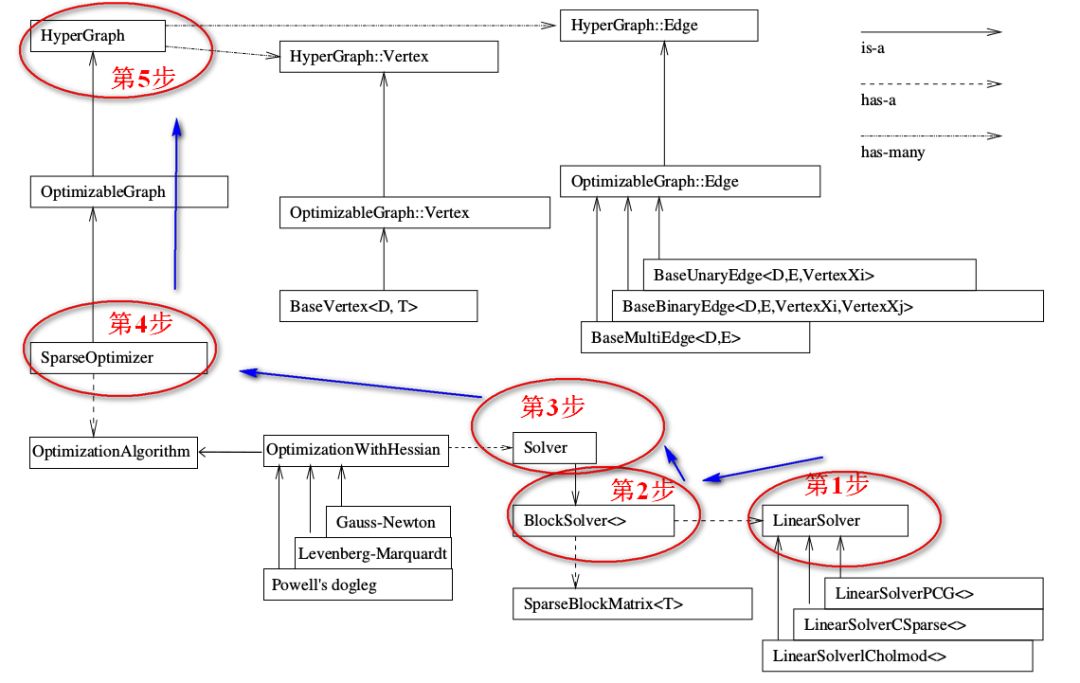
1.2 g2o编程流程

从零开始一起学习SLAM | 理解图优化,一步步带你看懂g2o代码 (qq.com) 参考至这里,感谢分享。
- 创建一个线性求解器LinearSolver
-
创建BlockSolver。并用上面定义的线性求解器初始化。
-
创建总求解器solver。并从GN, LM, DogLeg 中选一个,再用上述块求解器BlockSolver初始化
-
创建终极大boss 稀疏优化器(SparseOptimizer),并用已定义求解器作为求解方法。
-
定义图的顶点和边。并添加到SparseOptimizer中。
-
设置优化参数,开始执行优化。
二、理解顶点
g2o本身内部定义了一些常用的顶点类型,能够直接用,不需要自己定义
1、2D pose Vertex, (x,y,theta)
VertexSE2 : public BaseVertex<3, SE2> 2、6d vector (x,y,z,qx,qy,qz) (note that we leave out the w part of the quaternion)
VertexSE3 : public BaseVertex<6, Isometry3> 3、
VertexPointXY : public BaseVertex<2, Vector2>
4、
VertexPointXYZ : public BaseVertex<3, Vector3>
5、
VertexSBAPointXYZ : public BaseVertex<3, Vector3>6、SE3 Vertex parameterized internally with a transformation matrix and externally with its exponential mapVertexSE3Expmap : public BaseVertex<6, SE3Quat>// SBACam Vertex, (x,y,z,qw,qx,qy,qz),(x,y,z,qx,qy,qz) (note that we leave out the w part of the quaternion.7、qw is assumed to be positive, otherwise there is an ambiguity in qx,qy,qz as a rotation
VertexCam : public BaseVertex<6, SBACam>8、Sim3 Vertex, (x,y,z,qw,qx,qy,qz),7d vector,(x,y,z,qx,qy,qz) (note that we leave out the w part of the quaternion.VertexSim3Expmap : public BaseVertex<7, Sim3>有时候我们需要的顶点类型这里面没有,就需要自己定义顶点类型。重新定义顶点一般需要考虑重写如下函数:
virtual bool read(std::istream& is);
virtual bool write(std::ostream& os) const;
virtual void oplusImpl(const number_t* update);
virtual void setToOriginImpl();read,write:分别是读盘、存盘函数,一般情况下不需要进行读/写操作的话,仅仅声明一下就可以
setToOriginImpl:顶点重置函数,设定被优化变量的原始值。
oplusImpl:顶点更新函数。非常重要的一个函数,主要用于优化过程中增量△x 的计算。我们根据增量方程计算出增量之后,就是通过这个函数对估计值进行调整的,因此这个函数的内容一定要重视。
如:

在如十四讲中曲线拟合中定义的顶点

注意有些顶点不满足加法运算时候,不支持这么简单的更新操作。
比如

_estimate = SE3Quat();
它内部使用了四元数表达旋转,然后加上位移来存储位姿,同时支持李代数上的运算,比如对数映射(log函数)、李代数上增量(update函数)等操作
之所以不使用变换矩阵,是因为变换矩阵不满足加法封闭。相机位姿顶点类VertexSE3Expmap使用了李代数表示相机位姿,而不是使用旋转矩阵和平移矩阵。还有一个重要原因就是,旋转矩阵是有约束的矩阵,它必须是正交矩阵且行列式为1。使用它作为优化变量就会引入额外的约束条件,从而增大优化的复杂度。而将旋转矩阵通过李群-李代数之间的转换关系转换为李代数表示,就可以把位姿估计变成无约束的优化问题,求解难度降低。
三、向图添加顶点
再如十四讲中的例子:

四、总结
目前刚接触了下g2o,了解下g2o做了件什么事情,帮助自己在看orbslam2的代码时,更好地理解。这里记录下顶点的理解。后年逐步深化去学习。
这篇关于g2o学习笔记-理解顶点(一)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





