fanuc专题

FANUC A06B-6220-H030#H600 驱动器的优缺点
优点: 高性能:采用先进的数字信号处理器(DSP)作为控制核心,能够实现复杂的控制算法,提供高精度和高响应速度的运动控制。高可靠性:内置多种故障检测和保护电路,如过电压、过电流、过热、欠压等,确保在异常情况下能够自动保护,避免设备损坏。软启动功能减小了启动过程对驱动器的冲击,延长了设备的使用寿命。广泛应用性:适用于多种工业自动化和机器人系统,如装配机器人、搬运机器人、焊接机器人以及数控机床等,满

FANUC喷涂机器人P-350iA电机过热维修解决方案
发那科喷涂机器人作为自动化喷涂生产线的重要组成部分,其性能稳定性和可靠性对于生产效率和产品质量具有重要影响。然而,在实际使用过程中,FANUC喷涂机器人P-350iA电机过热故障问题往往成为影响其正常运行的主要因素之一。 FANUC机器人M-1000iA维修电机过热故障 法那科机器人伺服电机维修 一、法兰克机器人电机过热故障的原因 1. 负载过大:FANUC喷涂机器人P-350iA在工作时,如
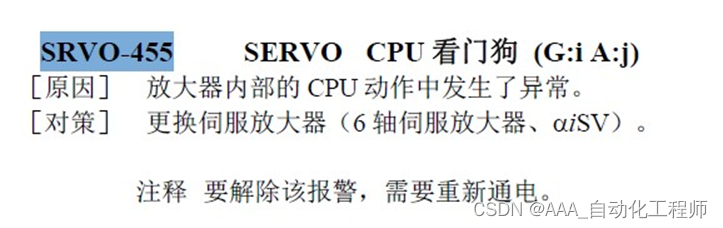
FANUC机器人SRVO-454和SRVO-455故障报警处理总结
FANUC机器人SRVO-454和SRVO-455故障报警处理总结 公司内的一台FANUC机器人(型号:M-900iB;控制柜型号:R-30iB)正常运转过程中突然报警: SRVO-455 CPU看门狗(G:1 A:2), 按Reset键无法消除该报警; 查看SRVO-455故障报警的具体内容,如下图所示: 由于现场没有备用的伺服放大器,所以只能尝试将控制柜断电处理;

FANUC机器人初始化系统的基本方法和步骤
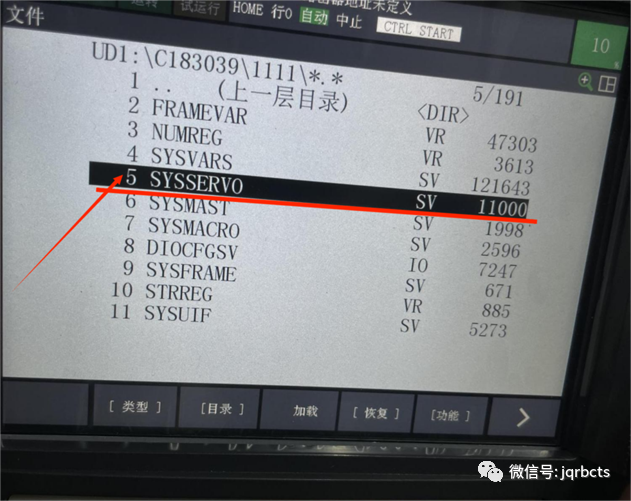
FANUC机器人初始化系统的基本方法和步骤 首先,在做系统初始化之前,必须做好系统的备份,这里做个镜像备份,更详细的镜像备份步骤可参考以下链接中的内容: FANUC机器人进行全部备份和镜像备份以及加载备份文件的具体操作(图文) 如下图所示,在示教器右边的USB接口上插个U盘(FAT32格式的,小于32G),选择备份—镜像备份,(最好是全备份和镜像备份都做一下),
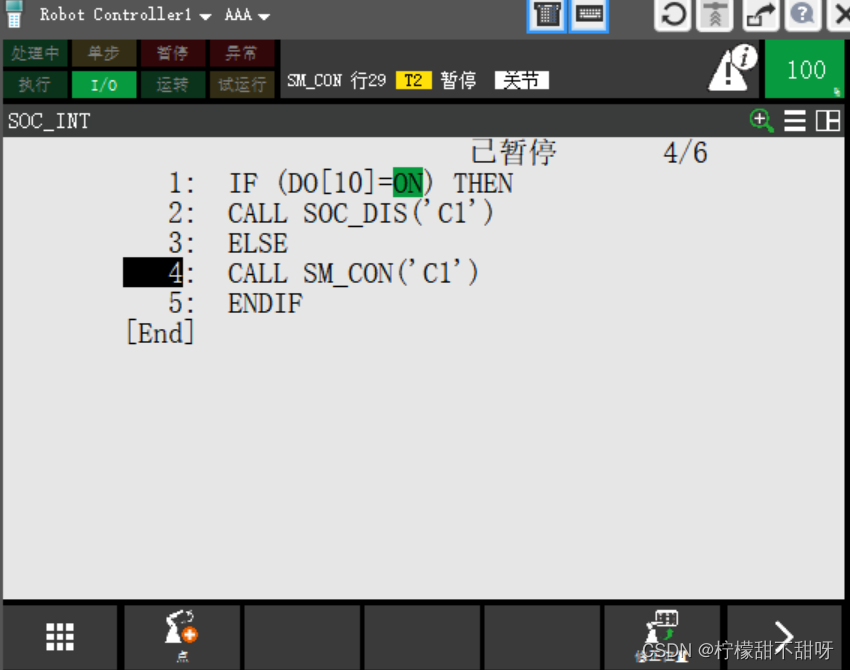
FANUC机器人SOCKET断开KAREL程序编写
一、添加一个.KL文件创建编辑断开指令 添加一个KL文件用来创建karel程序中socket断开指令 二、断开连接程序karel代码 PROGRAM SOC_DIS%COMMENT = 'SOCKET断开'%INCLUDE klevccdfVARstr_input,str_val : STRING[20]status,data_type,int_val : INTEGER

发那科FANUC机器人R-2000iB平衡缸维修攻略
在发那科机器人中,平衡缸扮演着稳定机械臂运动的关键角色。它通过内部的压力调节来平衡负载,保证机器人的精准定位和平稳操作。一旦出现法兰克机械手平衡缸故障或损坏,机器人的性能可能会大打折扣,因此及时且正确的FANUC机械手平衡缸维修至关重要。 一、常见法兰克机械臂R-2000iB平衡缸故障诊断 在处理平衡缸问题时,第一步是准确诊断出故障原因。常见问题包括压力不稳定、密封不良导致的泄露、以及零件磨损
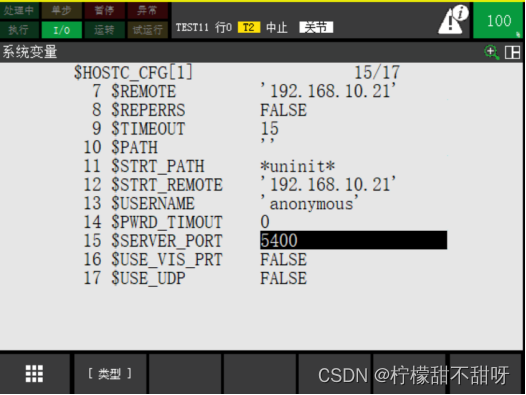
FANUC机器人socket通讯硬件配置
一、添加机器人选配包 Fanuc机器人要进行socket通讯,需要有机器人通讯的选配包,1A05B-2600-R648 User Socket Msg,1A05B-2600-R632 KAREL,1A05B-2600-R566 KAREL Diagnostic,1A05B-2600-J971 KAREL Use Sprt FCTN。 二、FANUC机器人通讯配置 将fanuc机器人ker

【Python】FANUC机器人OPC UA通信并记录数据
目录 引言机器人仿真环境准备代码实现1. 导入库2. 设置参数3. 日志配置4. OPC UA通信5. 备份旧CSV文件6. 主函数 总结 引言 OPC UA(Open Platform Communications Unified Architecture)是一种跨平台的、开放的数据交换标准,常用于工业自动化领域。Python因其易用性和丰富的库支持,成为实现OPC UA通
FANUC机器人故障诊断—报警代码更新(三)
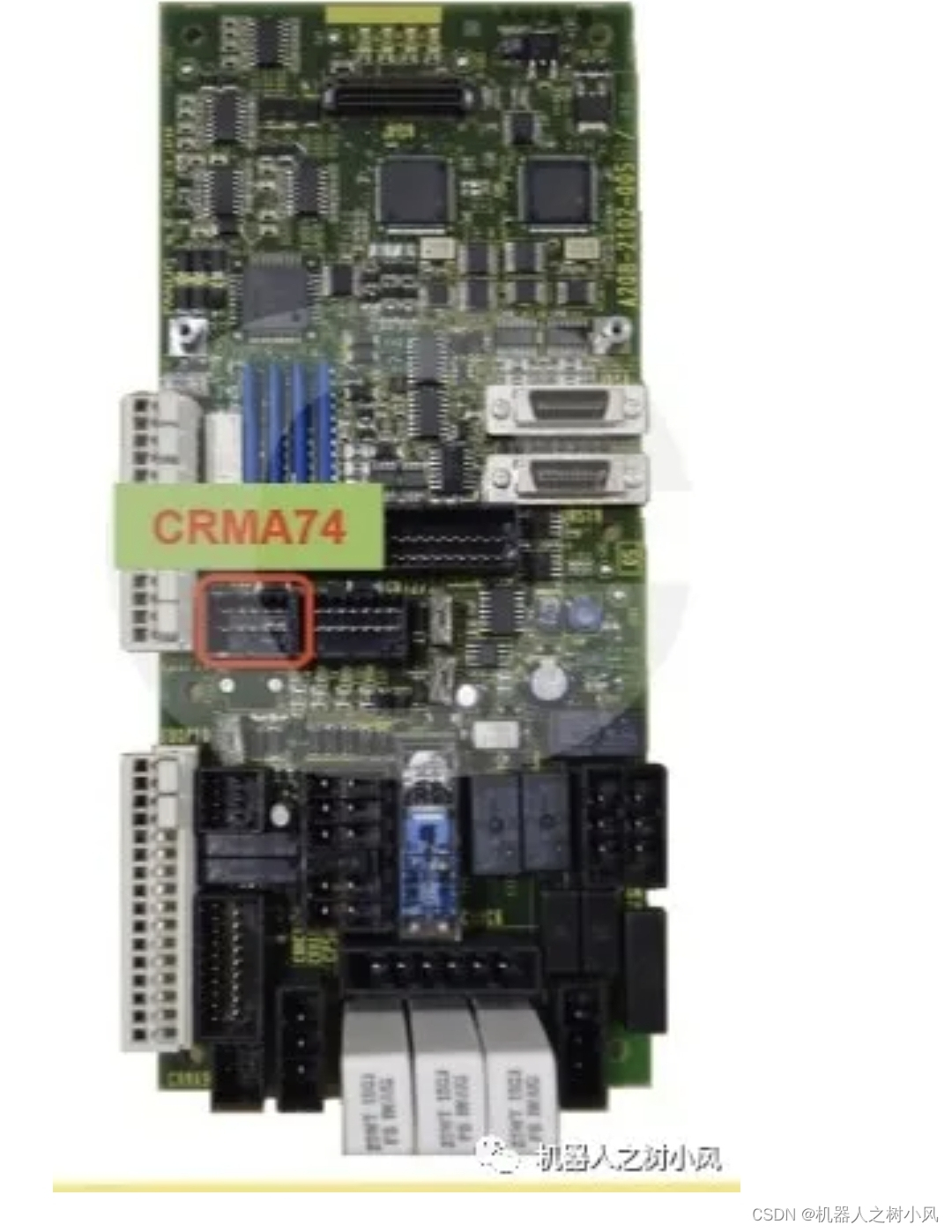
FANUC机器人故障诊断中,有些报警代码,继续更新如下。 一、报警代码(SRVO-348) SRVO-348DCS MCC关闭报警a,b [原因]向电磁接触器发出了关闭指令,而电磁接触器尚未关闭。 [对策] 1.当急停单元上连接了CRMA74信号时,检查连接目的地是否有问题。 2.确认急停板上的保险丝(FUSE4) 。 3.更换急停单元。 (要消除该报警,必须要断电

FANUC机器人KAREL语言程序结构(入门)
一、karel语言程序结构 FANUC机器人keral语言编程结构如下图所示: Keral指令对应的基础用法如下所示: 二、创建一个简单的写屏程序 依照对应的karel语法写写入下列程序 运行对应的程序进行测试:

FANUC机器人MEMO-126故障报警,无更多可用TPP内存的处理方法
FANUC机器人MEMO-126故障报警,无更多可用TPP内存的处理方法 如下图所示,示教器上报警提示“MEMO-126 无更多可用TPP内存”, 检查系统TPP存储空间是否够用,如下图所示,依次找到MENU—状态—存储器, 如下图所示,点击下方的“详细”进入下一画面, 如下图所示,此时可以看到TPP存储区占用的内存大小, 处理方法1: 将不常用的TP程序拷贝备份到电脑中

FANUC机器人零点标定的基本步骤(出厂数据)
FANUC机器人零点标定的基本步骤(出厂数据) FANUC 零点数据存在问题的机器人通常会出现以下几种报警: (1)SRVO-062报警 - 脉冲编码器数据丢失,机器人完全不能动,具体消除方法可参考以下链接中的内容: FANUC机器人SRVO-062报警原因分析及处理对策 (2)SRVO-075报警 - 脉冲编码器无法计数,机器人仅可以单关节运动,具体消除方法可参考以下链接中的内容:

FANUC机器人某个轴编码器损坏时进行单轴零点标定的具体方法
FANUC机器人某个轴编码器损坏时进行单轴零点标定的具体方法 前提: FANUC机器人编码器或其线路有损坏,一般先将机器人移动至零点位置,编码器相关部件更换完毕后,直接进行零点标定即可。但是对于突发的状况,这种方法显然是不行的,比如在生产过程中突然发生碰撞导致编码器相关部件损坏,机器人故障报警,此时无法移至零位。 前面和大家分享过零点标定的一些方法,大家可以参考以下链接中的内容:


GE Fanuc 通用电气 IC695NKT002组件 以太网网络接口单元
描述:该IC695NKT002是由艾默生自动化(前身为 GE 智能平台 (GE IP))制造的 PACSystems RX3i 组件。该模块是一个封装产品,由一 (1) 个目录号为 IC695NIU001 的以太网 NIU 和两 (2) 个目录号为 IC695ETM001 的以太网接口模块组成。该组件简化了订购系统,并确保订购了完整的组件。 关于IC695NKT002 IC695NKT002是

FANUC/发那科机器人基础知识(1)
一、主要用途: 弧焊 Arc welding,点焊 Spot welding,搬运 Handing,涂胶 Sealing,喷漆 Painting,去毛刺,切割,激光焊接,测量等等。 二、软件系统 Handling Tool 搬运Paint Tool 油漆Spot Tool 点焊Laser Tool 激光焊接和切Arc Tool 弧焊Sealing Tool 布胶 三、控制
FANUC机器人外部远程启动的相关参数设置示例
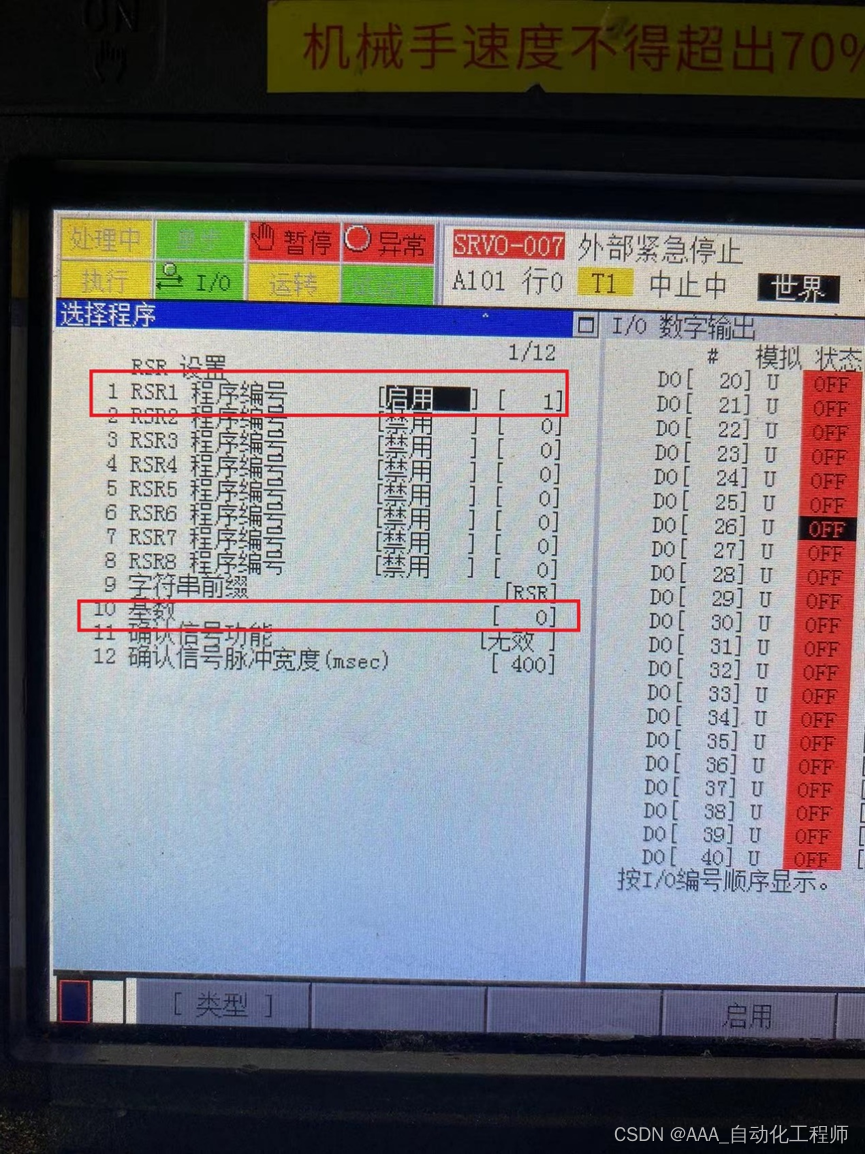
FANUC机器人外部远程启动的相关参数设置示例 如下图所示,在MENU---设置---选择程序中,设置程序选择模式:RSR(这个根据自己实际使用的自动启动方式来决定,你用RSR选RSR,用PNS就选PNS), 自动运行开始方法:选择UOP,即RSR1-RSR8的启动信号分别对应UI9-UI16, 最后,点击下方的“详细”,进入进一步设置画面, 如下图所示,在详细设置画面中,用哪

FANUC机器人如何清除示教器右上角的白色感叹号?
FANUC机器人如何清除示教器右上角的白色感叹号? 如下图所示,示教器上显示白色的感叹号,如何清除呢? 具体可参考以下步骤: 按下示教器上白色的“i”键,如下图所示, 如下图所示,按下i键后进入该画面,点击下方的“清除所有”, 如下图所示,在弹出的画面上选择其中一个(一天或一周), 如下图所示,这里以一周为例,选择后,将光标移至OK,按enter确认, 如下图
FANUC机器人示教器的菜单变成了图标,如何改成列表的形式?
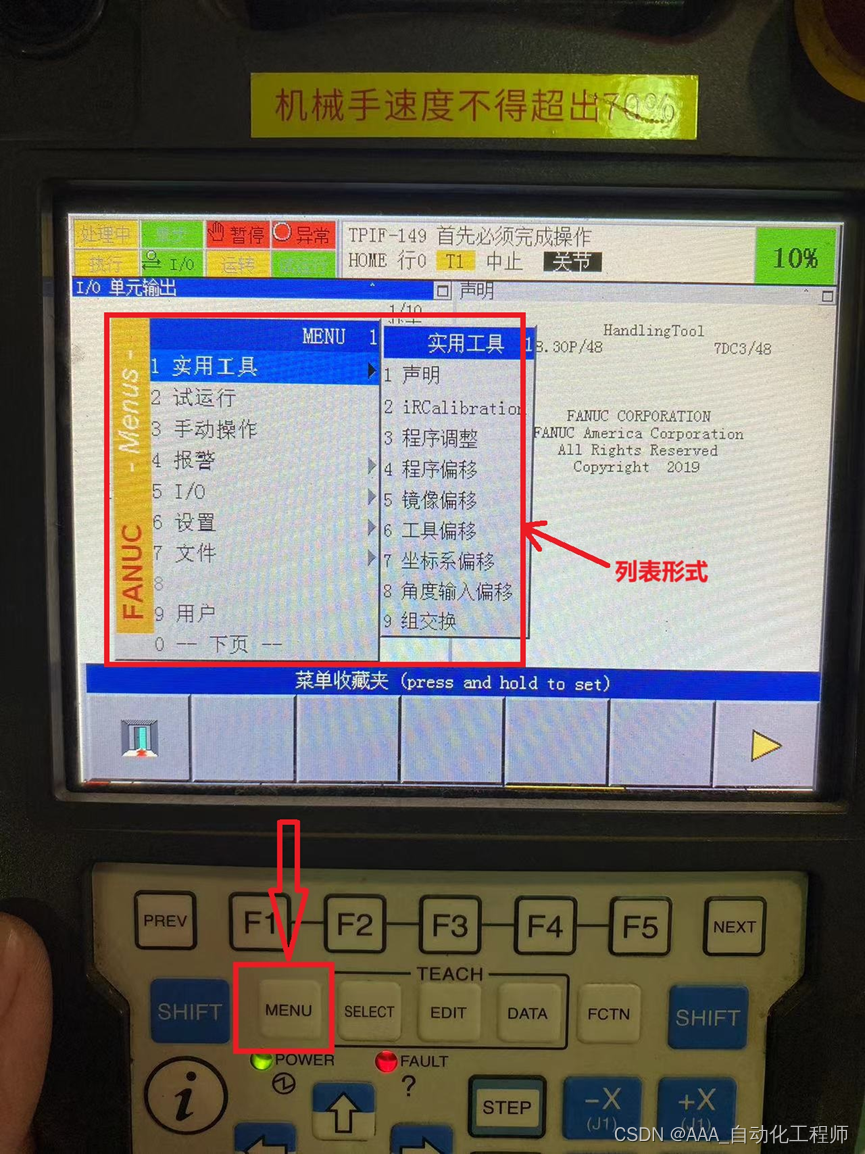
FANUC机器人示教器的菜单变成了图标,如何改成列表的形式? 如下图所示,开机后按下MENU菜单键时,发现原来的列表形式变成了菜单图标的形式,同时在按F1-F5键时,提示:HMI模式-键不可用, 如何改回原来的列表形式呢? 如下图所示,按下FCTN键,找到下一页,找到“禁用HMI菜单”(我这里已经禁用了,所以显示的是启用HMI菜单), 如下图所示,再次按下MENU菜单键时,可以

FANUC机器人急停单元和急停板的更换方法和步骤
FANUC机器人急停单元和急停板的更换方法和步骤 一、 急停单元的更换 拆下连接在急停单元上的电缆;拧松固定在急停单元上的防脱落螺钉(M5: 3个),更换急停单元(A柜); 拆除固定在急停单元上的螺钉(M4: 4个),更换急停单元(B柜);按照原样安装原来的电缆; 二、 急停板的更换 1.拆除连接在急停板上的电缆; 2.拆除固定在基板上的尼龙插销(A柜5

Fanuc(发那科)机床读取主轴倍率和进给倍率
目录 一、倍率是什么 二、如何控制倍率 三、倍率的数据存在哪 四、代码实现 说明 一、倍率是什么 以主轴倍率为例 主轴倍率可以通过以下公式计算: 主轴倍率 =主轴实际转速/主轴指令转速 注:主轴指令转速是指我们NC程序文件中S Code,即指令转速 二、如何控制倍率 一般通过机床外置的旋钮,来控制倍率。 三、倍率的数据存在哪
一文学会配置Fanuc控制柜端ROS2驱动
文章目录 前言一、RobotGuide是什么?二、实现步骤创建机器人工作单元导入程序TP程序Karel程序 构建程序配置控制柜配置机器人控制柜通讯配置可同时运行程序数量配置ROS_RELAY变量配置ROS_STATE变量设置启用标志 三、测试机器人状态反馈机器人命令接收整体运行测试 总结 前言 本文用来记录如何配置Fanuc机器人控制器ros驱动,目的是后续实现ROS2控制
FANUC机器人 IO分配记录
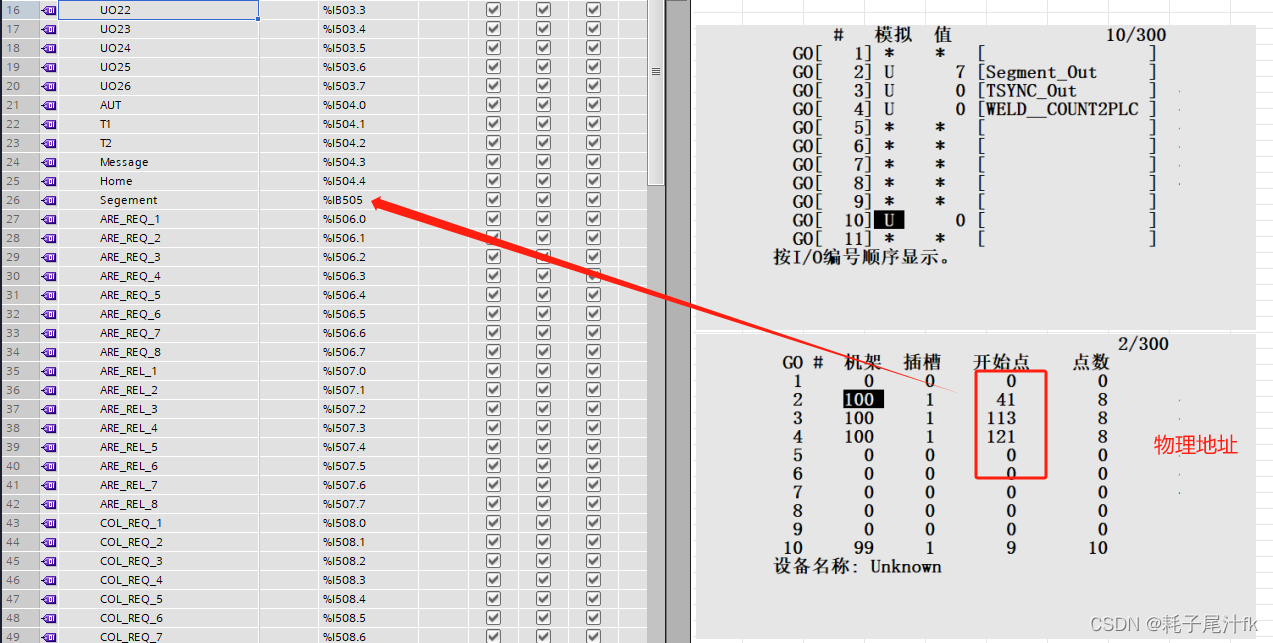
之前有一个疑惑就是 UOP和数字IO怎么分配的 如上图 UOP 中UO一共有20个 按照上图右侧 分配 机架100 profinet 机器人做从站 插槽为1(默认设置) 开始点就是指PLC端物理地址的起始位置 如上图左侧 PLC从I500.0开始 UO1-8 对应I500.0-I500.7 UO9-10 对应I501.0-I501.1 UO11-20 对应 IB502 I
FANUC机器人镜像恢复和刷通讯包
1、先镜像备份好机器人系统程序文件 2、F1和 F5镜像备份后关机重启进入控制模式导入已配置好的镜像Modbus程序文件(选择第4个选项) 3、再进入控制柜写入(选择第3个) 3、再进入UD1(选择第3个) 4、选择要刷入的文件 5、再选择第一个进入 6、选择第3个控制器启动 7、冷启动完之后进入工具设置编辑机器人编号

fanuc机器人自动程序前怎么回原点,FANUC机器人抓取程序案例
FANUC机器人抓取程序案例 FANUC机器人抓取程序案例 FANUC机器人抓取程序案例 原创 工业机器人辅导员 工业机器人辅导员 2019-07-19 1:TIMER[1]=RESET 2:TIMER[1]=START 3:UTOOL_NUM=1 [工具坐标系1] 4:UFRAME_NUM=1 [用户坐标系1] 5:OVERRIDE=50% [速度50%] 6:D0[101]=OFF [机器

FANUC小黄机刀库小知识 介绍
小黄机刀库小知识 FANUC小黄机 刀库故障率特低,刀库结构设计的相当牛B;一般的数控加工中心刀库肯定离不了电机,减速机构,原点感应,计数感应,伺服或变频控制等等……相当的复杂。如果你没见过FANUC小黄机 刀库内部结构,点击链接查看→FANUC小黄机 刀库内部结构你见过吗? FANUC刀库相关的资料及参数少之又少,几乎找不到,今天就给‘机友们’简单介绍一下有关刀库的小知识: 常见的3种换