本文主要是介绍FANUC机器人SRVO-454和SRVO-455故障报警处理总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
FANUC机器人SRVO-454和SRVO-455故障报警处理总结

公司内的一台FANUC机器人(型号:M-900iB;控制柜型号:R-30iB)正常运转过程中突然报警:
| SRVO-455 CPU看门狗(G:1 A:2), |
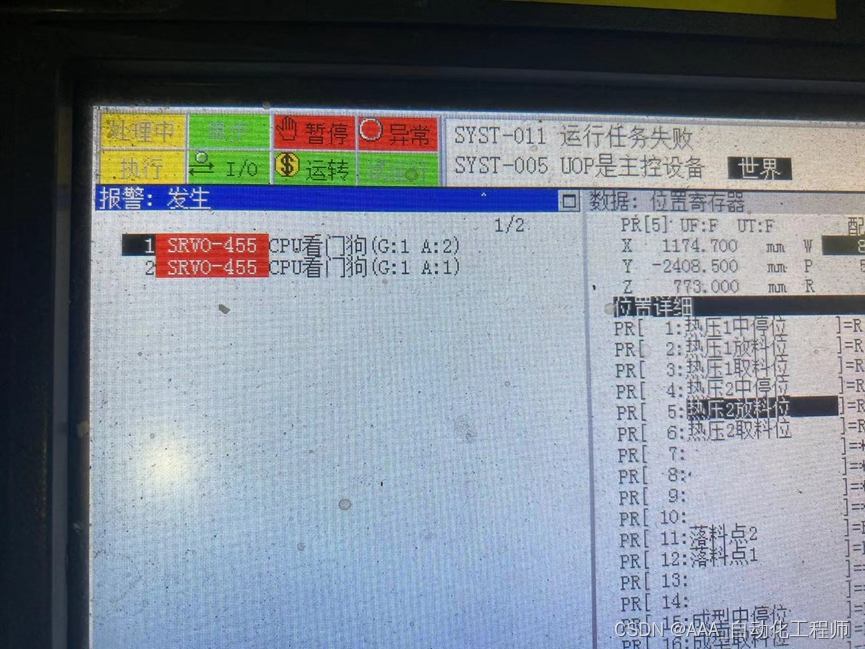
按Reset键无法消除该报警;
| 查看SRVO-455故障报警的具体内容,如下图所示: |
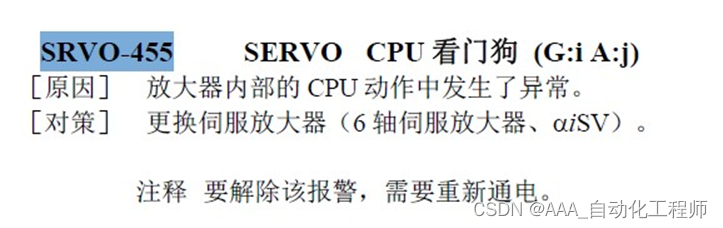
由于现场没有备用的伺服放大器,所以只能尝试将控制柜断电处理;
重新给控制柜上电,SRVO-455报警消除;
重新启动机器人;
再次运行20分钟后,机器人再次报警,如下图所示:
| 同时出现SRVO-055 FSSB通讯错误和S |
这篇关于FANUC机器人SRVO-454和SRVO-455故障报警处理总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




