srvo专题
FANUC机器人SRVO-454和SRVO-455故障报警处理总结
FANUC机器人SRVO-454和SRVO-455故障报警处理总结 公司内的一台FANUC机器人(型号:M-900iB;控制柜型号:R-30iB)正常运转过程中突然报警: SRVO-455 CPU看门狗(G:1 A:2), 按Reset键无法消除该报警; 查看SRVO-455故障报警的具体内容,如下图所示: 由于现场没有备用的伺服放大器,所以只能尝试将控制柜断电处理;

FANUC机器人SRVO-053故障报警处理方法
SRVO-053: 干扰值过大( G:i,A :j) 故障原因:机器人检测到干扰扭矩超出允许值。 若照此继续运行机器人,可能会发生SRVO-050报警。 本次发现的故障是由于操作员错误地选择了机器人的负载导致的。本来是200KG的负载,结果错选成了63KG的,这样都不用想了,肯定会报警的。果然,没多久,就出现了SRVO-050碰撞检测报警,位置误差已经过大了。 所以我们的处理对策是:先确认目前机

FANUC机器人SRVO-270和SRVO-271报警处理对策
FANUC机器人SRVO-270和SRVO-271报警处理对策 首先,我们先来看一下SRVO-270和SRVO-271报警的含义: SRVO-270:EXEMG1 状态异常 SRVO-271:EXEMG2 状态异常 原因:外部急停电路异常(外部急停信号的链异常),即通过EES(EXEMG)信号检测出了回路报警。 处理对策: 确认双重输入信号(EES)上连接的电路是否有故障;(可以将EE

FANUC机器人SRVO-220 SDI保险丝熔断报警处理方法
FANUC机器人SRVO-220 SDI保险丝熔断报警处理方法 一般在R-30iB Mate Plus柜的机器人上会遇到这个报警,R-30iB Plus柜则不会遇到这个报警。 如下图所示, 故障原因: 机器人EE接口的接线有短路的情况,检查EE接口的接线,排除掉故障原因 保险丝的更换: 如下图所示,打开控制柜之后,在黄色盖板的的下方,有个1A的保险丝,在断电的情况下,将该保险丝

FANUC机器人SRVO-062报警原因分析及处理对策
FANUC机器人SRVO-062报警原因分析及处理对策 报警内容: SRVO-062 BZAL报警(G:i A:j ) 报警原因: 脉冲编码器的绝对位置备用电池尚未连接或电量已耗尽。换上新电池后仍然发生该报警时,可能是由于机器人内部的电池电缆断线等导致。 一般若是机器人本体的备份电池电压低时,示教器上会出现SRVO-065报警。关于该报警的内容可以参考如下: SRVO-065 WARN
FANUC机器人SRVO-018故障报警诊断及处理对策
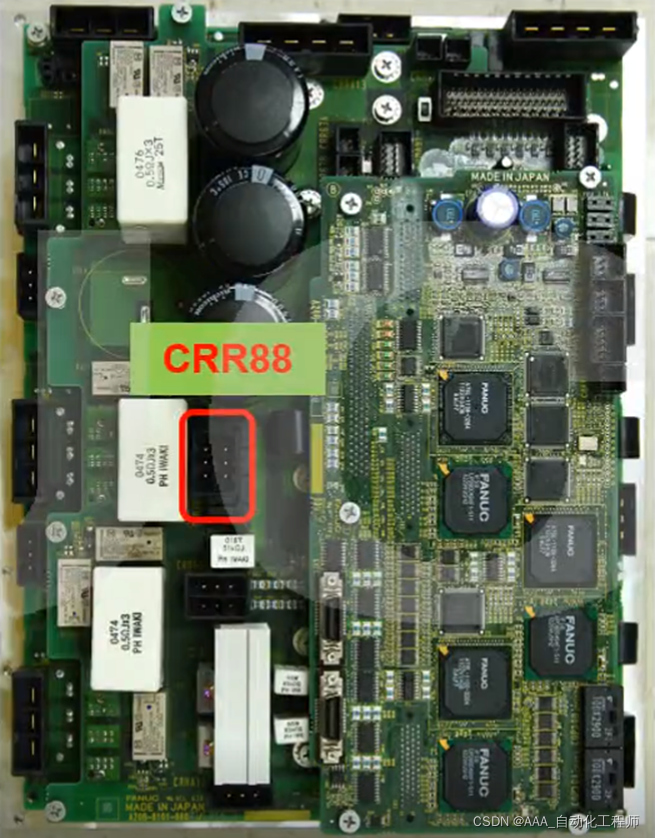
FANUC机器人SRVO-018故障报警诊断及处理对策 SRVO-018 制动器异常(G:i A:j) 原因:制动器电流过大 处理对策: 可能是由于机器人连接电缆的短路导致。 具体可参考以下分析: 确认6轴伺服放大器上的抱闸接口CRR88,如下图所示, 检查该接口连接的电缆、制动器电缆等是否有接地、破损或短路等异常情况 可以这样操作来进行简单的判断: 首先将机器人控制柜关机,然后将CR